







基于边缘计算的织物缺陷检测
摘要
本文提出了低延迟、低功耗、易于升级的基于边缘计算的自动视觉检测系统。
背景
应用背景->传统的和深度学习
传统的:统计分析 频域分析 模型分析
织物缺点自动检测满足三个要求:
1.高速运行的生产线需要检测系统满足实时性和低响应延迟的要求。
2.产品的功耗要尽可能地低。
3.为了方便生产线升级,检测系统必须具有良好的规模化。
本文贡献:
1.将Efficientdet和边缘计算相结合的织物缺点自动检测系统,并将边缘装置应用于织物缺点检测。
2.为了提高模型的鲁棒性,扩充训练了数据集,并在五个不同的织物数据集上比较了EfficientDet与主流单阶段检测网络
3.为了适应边缘设备有限的计算资源,利用TensorRT对模型进行优化,并比较了云计算和边缘计算的相应延迟。
相关工作
(包括介绍传统缺陷检测方法和基于深度学习的检测方法,以及边缘计算的现状)
A.传统缺陷检测方法
举例各时期在该应用领域提出的算法,然后进行论述优缺点,然后引出下一条的改进方法
(这些方法的计算成本高,且对小缺陷具有较低的精度)
B.深度学习缺陷检测方法
(虽然深度学习方法在总体上优于传统方法,但其系统的部署往往需要大量的计算资源。当计算资源不足时,会严重降低系统的检测性能。)
C.边缘计算及其应用
方法
检测部分
算法上:
Efficientdet:轻量级、可扩展的主干网络、特征提取网络;参数和FLOPs:3.9M和2.54B,这在检测速度上有绝对的优势。
数据集上:
为了增强模型在真实工业场景中的鲁棒性,我们扩充了训练数据集,包括随机裁剪、翻转、模糊、亮度增益和噪声。
实验和讨论
配置:
配置Intel i7-5930K处理器(3500 MHz)、64gb内存和NVIDIA GeForce GTX TITAN X GPU的本地工作站
软件部分:Windows 10操作系统和Tensorflow 2.1深度学习框架。所有边缘实验均在NVIDIA Jetson TX2边缘设备
NVIDIA Jetson TX2是一款高效、快速的嵌入式人工智能(AI)计算设备。
** 数据集:**
样本缺乏->样本扩充:随机裁剪、模糊处理、亮度增益、翻转、噪声处理
9:1划分
图像大小为256*256
评价指标
fps和map
EfficientDet的Box预测网络时基于锚点的->参考yolo-v233锚点聚类
锚箱比
图表
图1 边缘计算部署视图
图2 缺陷检测方法总视图
图3 EfficientDet-D0结构
图4 基于Jetson TX2的检测装置
图5 5种面料数据集
图6 数据扩充
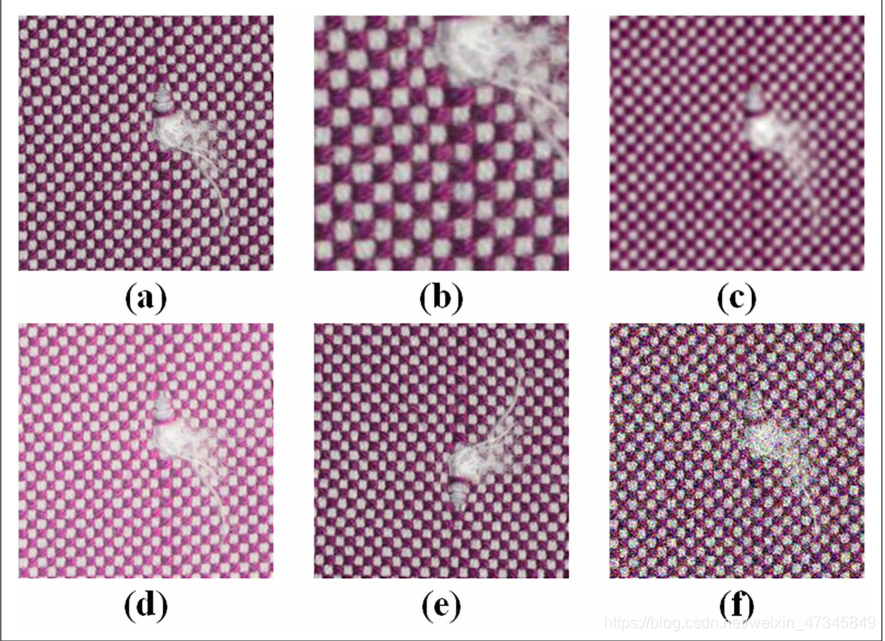
图7 5个数据集中不同模型检测结果的可视化比较。
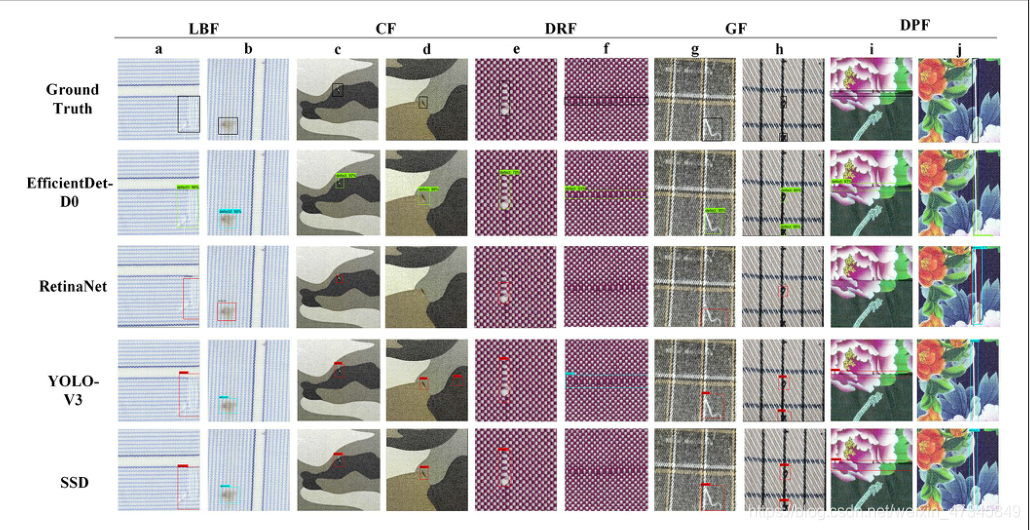
图8 不同数据集检测精度比较
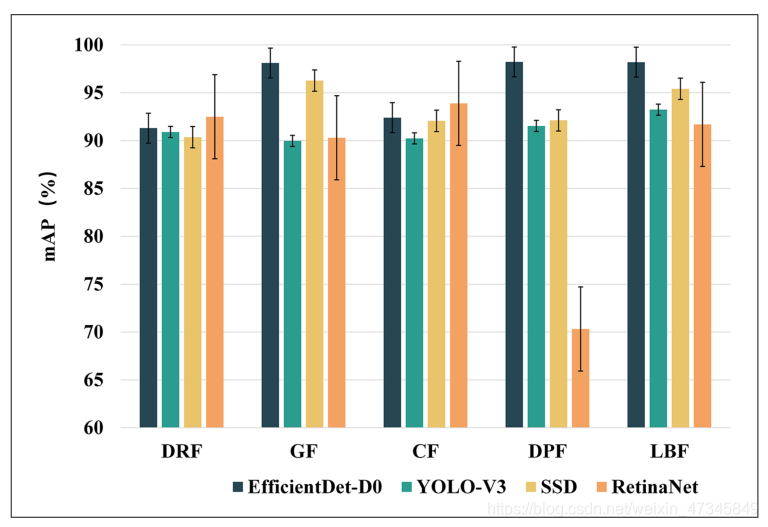
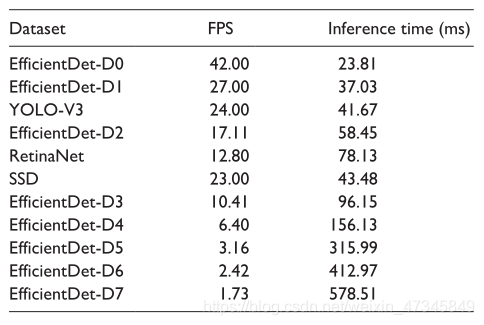
图9 不同模型的推理时间比较
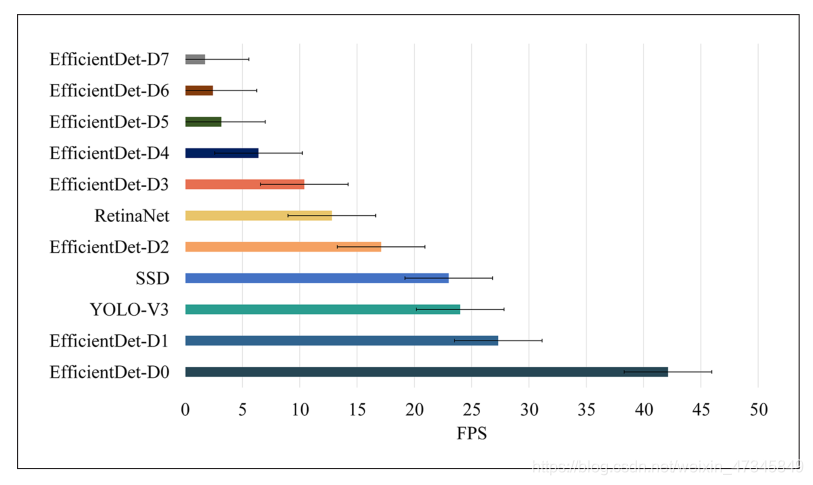
图 11 EfficientDet -D0模型优化前后的比较
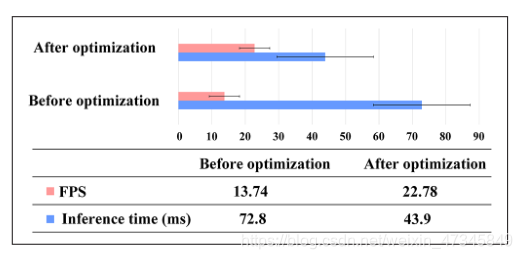
图12 检测结果
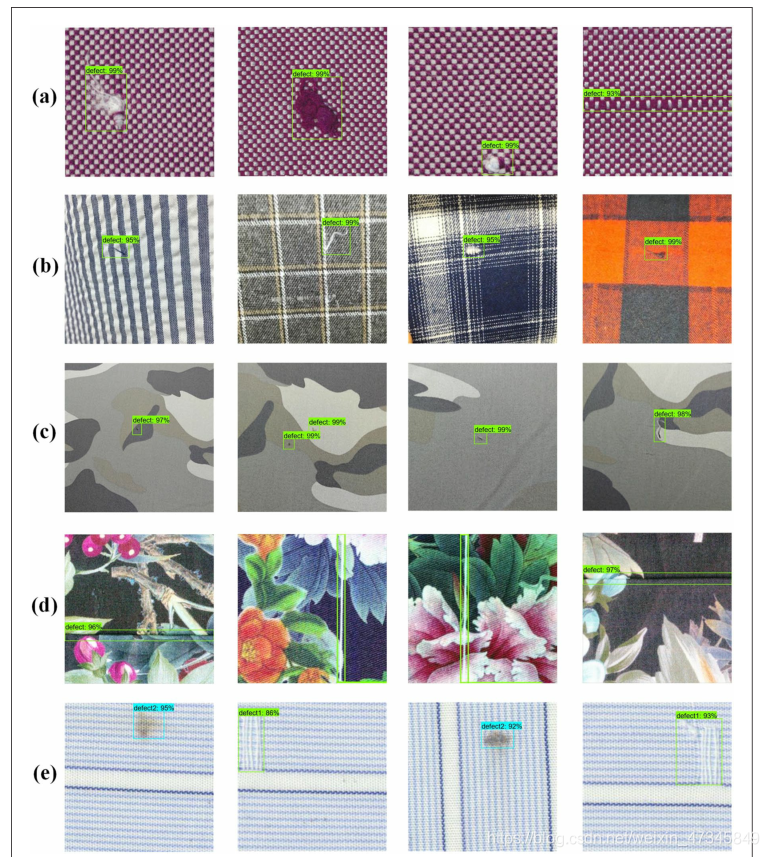
表1: 增强数据集的分布
表2: 5个数据集的锚箱比
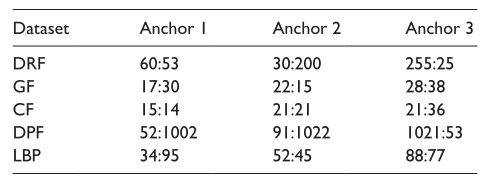
表3 不同检测模型的map

表4 工作站推理时间

















 663
663

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









