







1 基本使用
使用官方给的文档,文档英文,我的版本是中文。用的是CODEV10.2
一道练习题
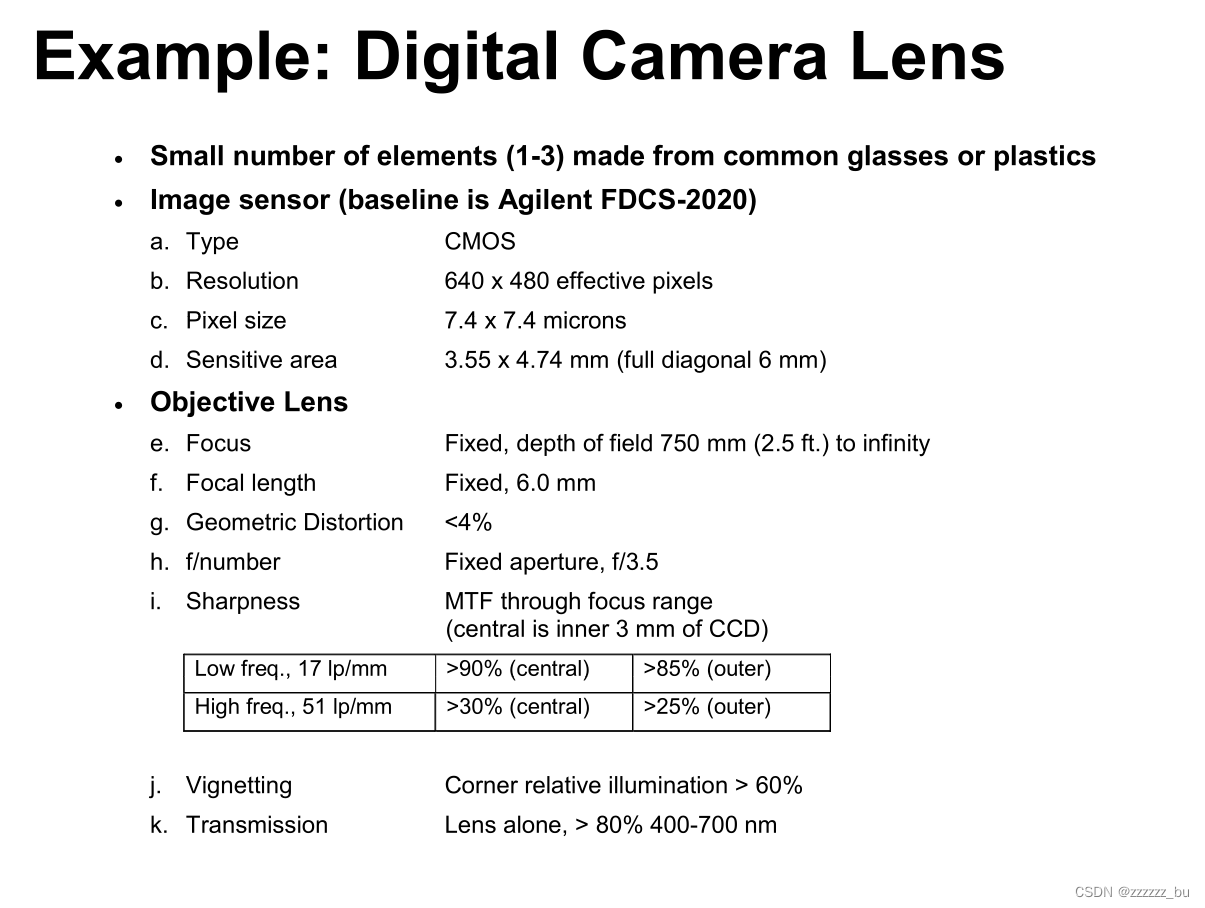
一. 新建镜头
- 文件–新建—专利镜头–滤片


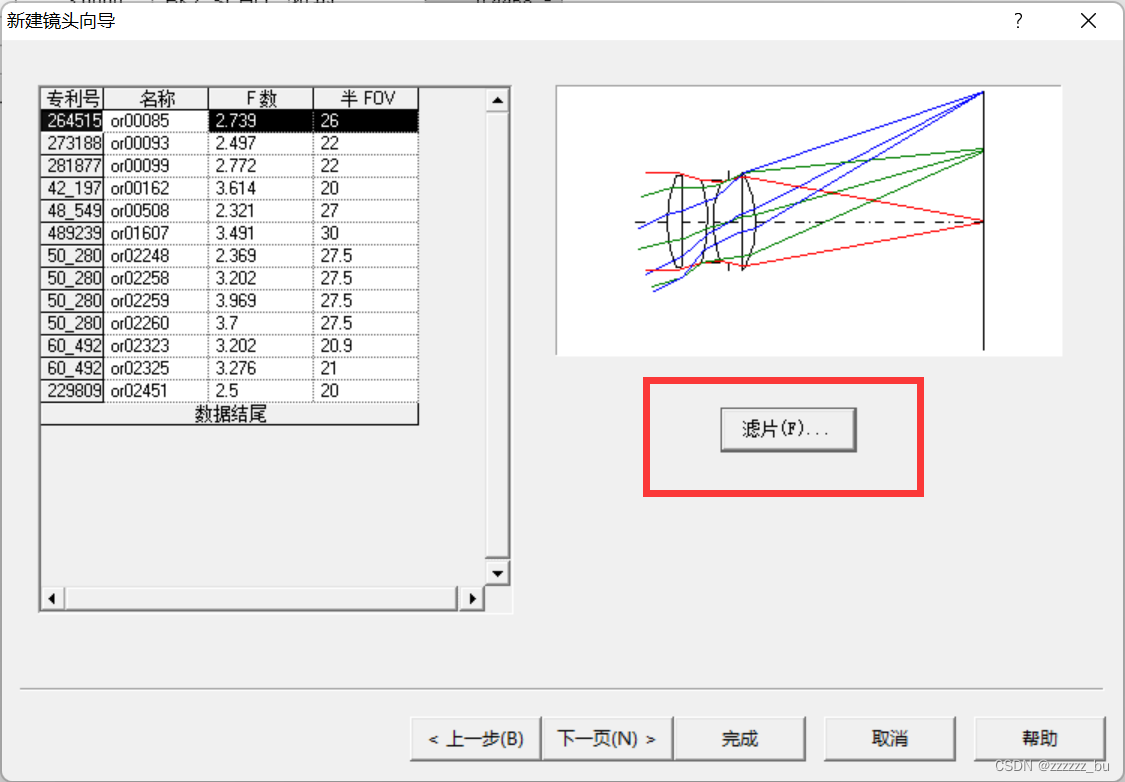
- 根据题目设计要求设置参数------确定
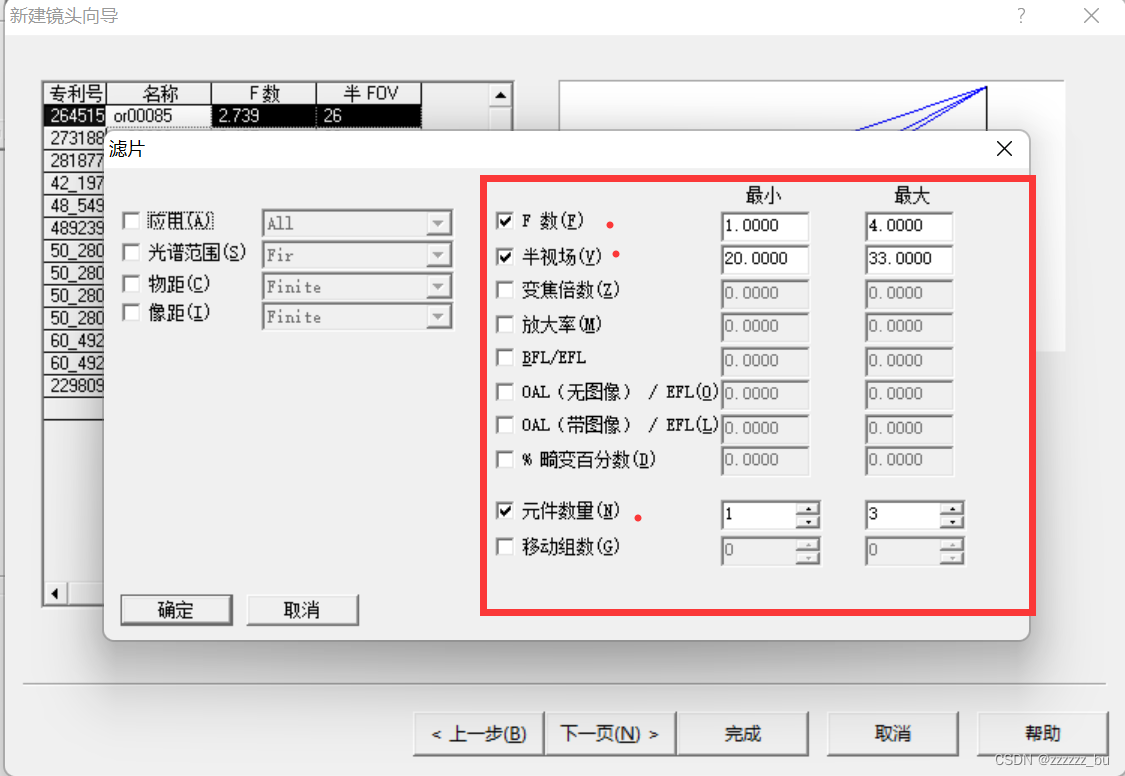
- 向导左边选择合适的镜头组合-----下一页
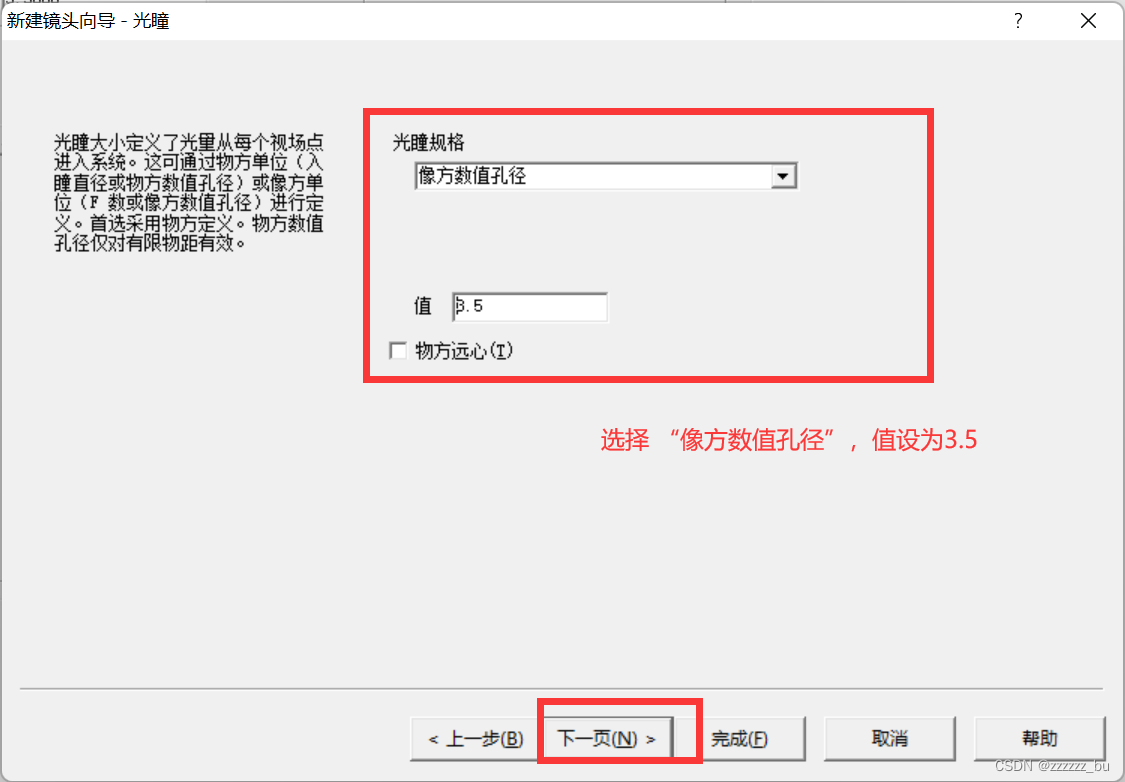
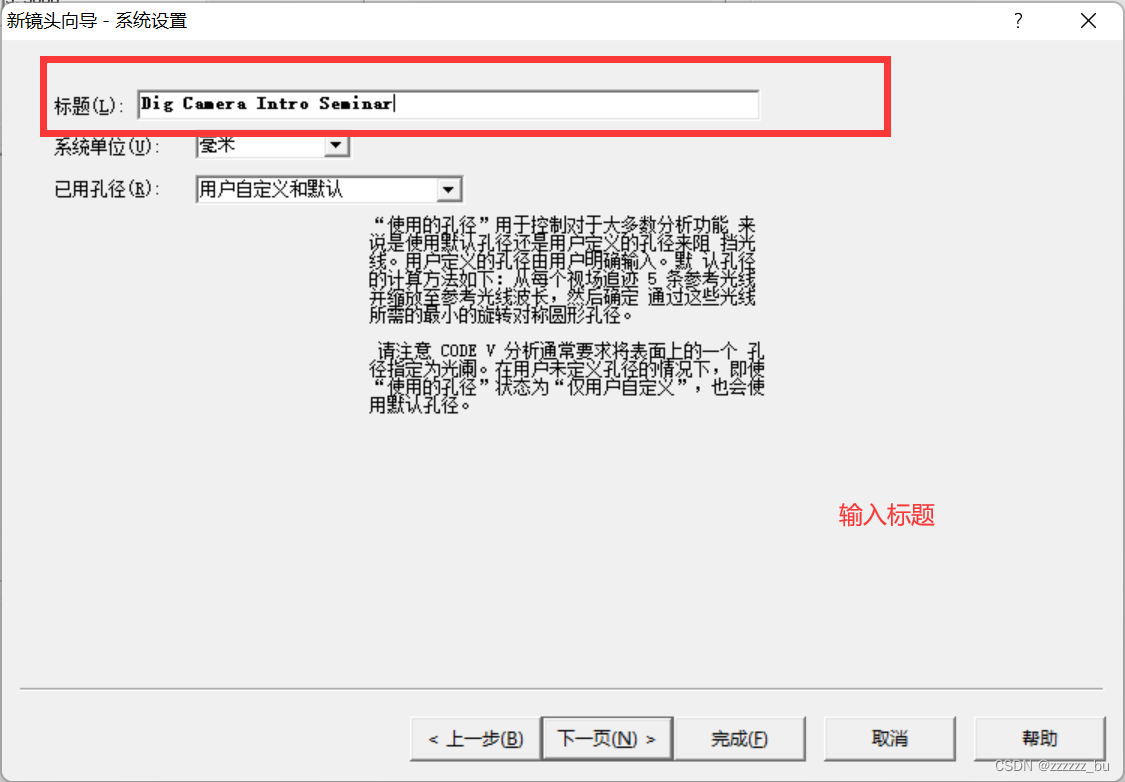
根据自己的设计要求选择光瞳规格及数据,这里输入错误,应该是像方F数,不是数值孔径

4 输入标题–下一页–完成
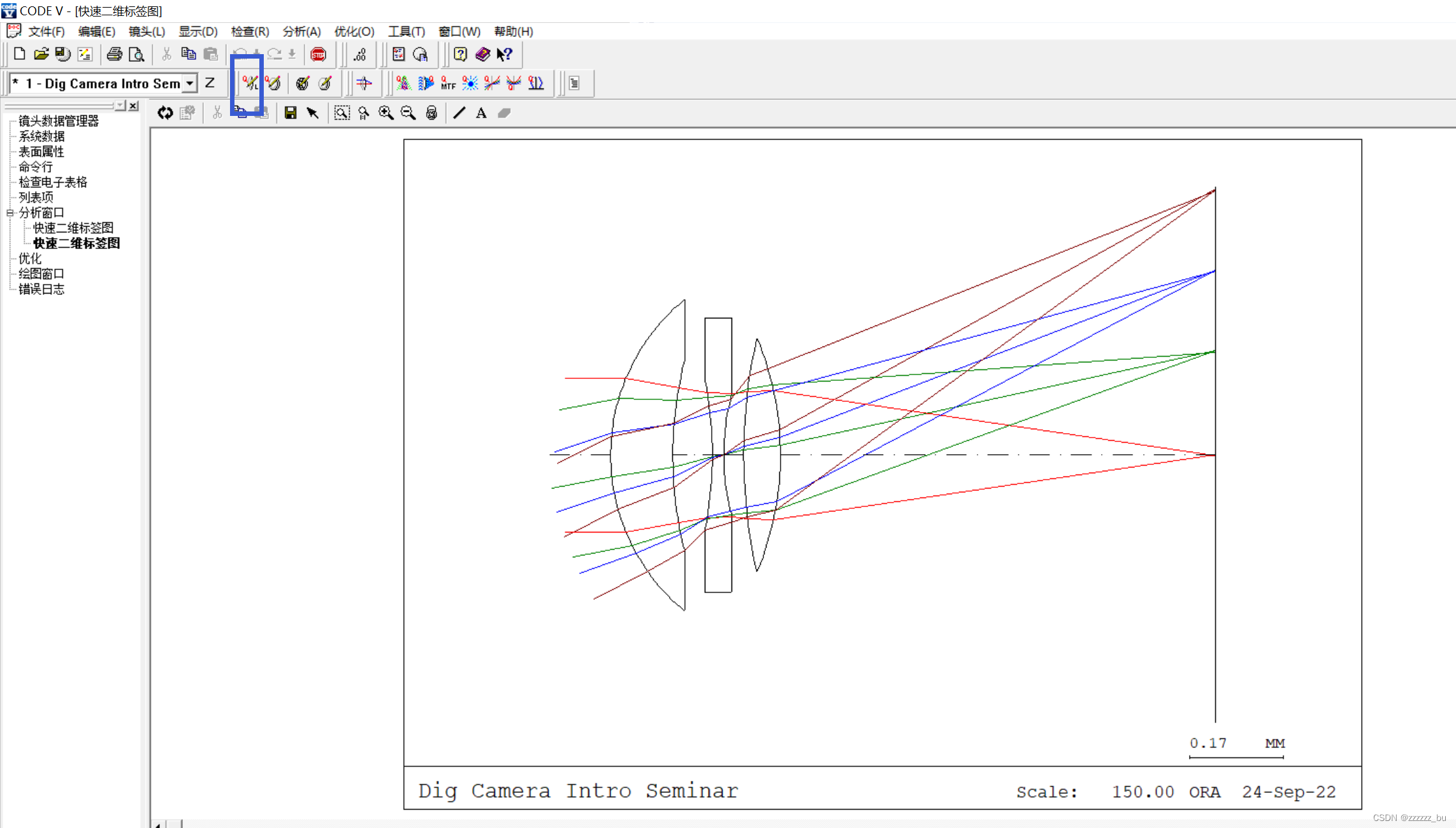
- 点击快速二维-标记(Quick 2D Labeled Plot)
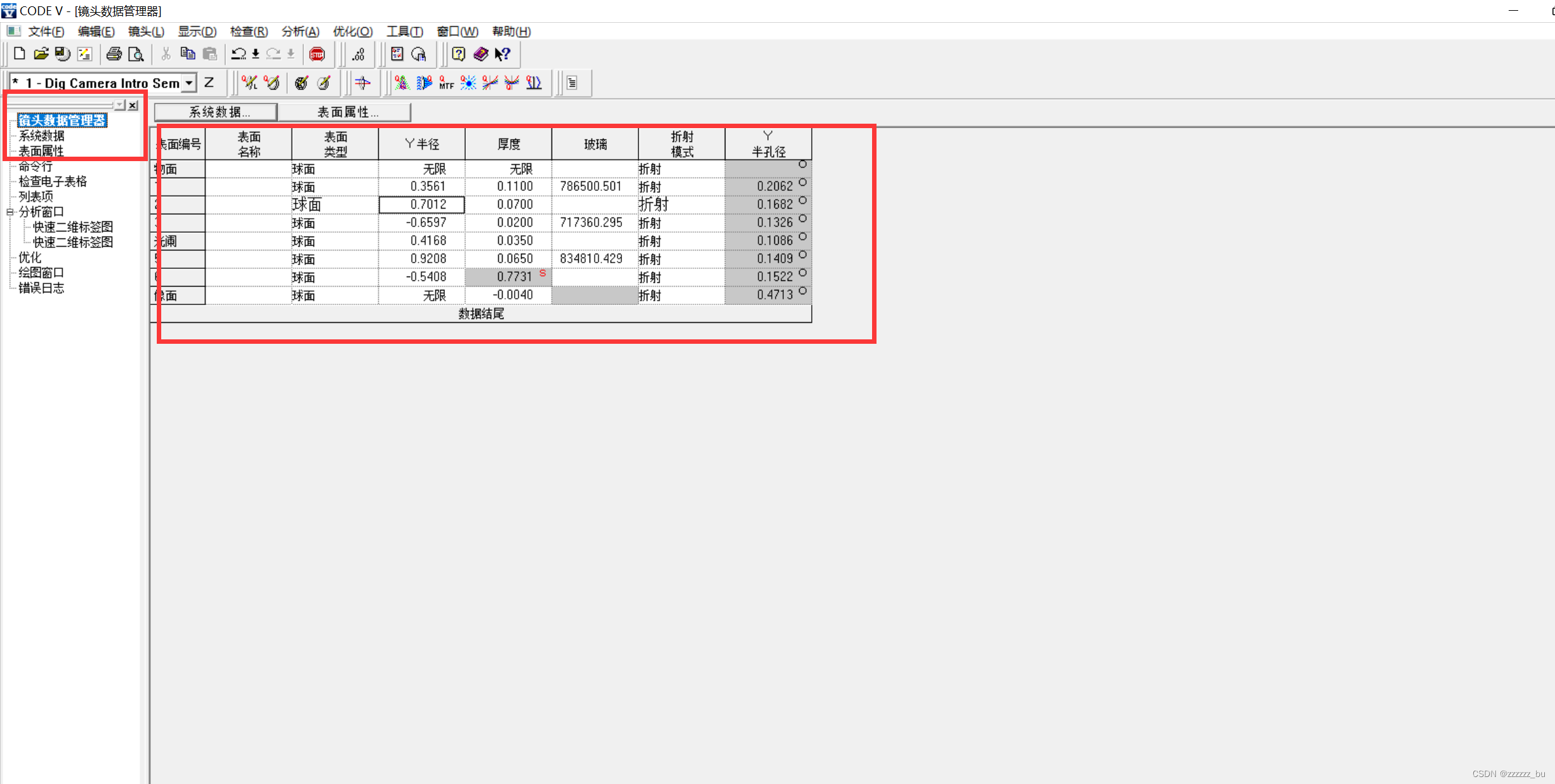
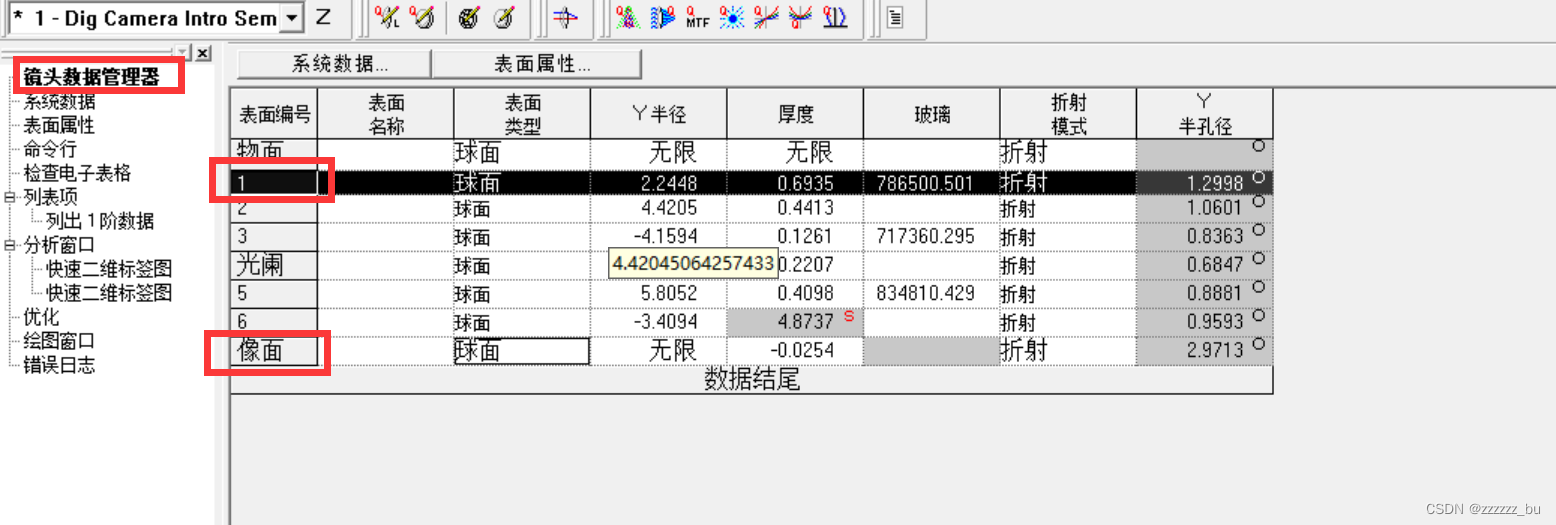
- 点击右边 镜头数据管理器,可以查看很多镜头表面信息,可以单击,或者右键,复制粘贴等编辑数据
二. 一阶参数
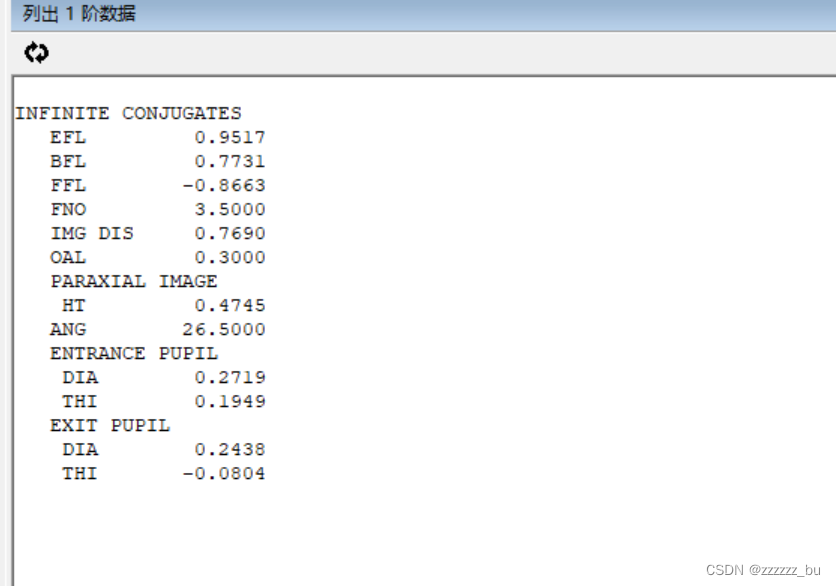
要求EFL为6mm
显示–列出镜头数据–一阶数据
可以看到EFL并不是6mm
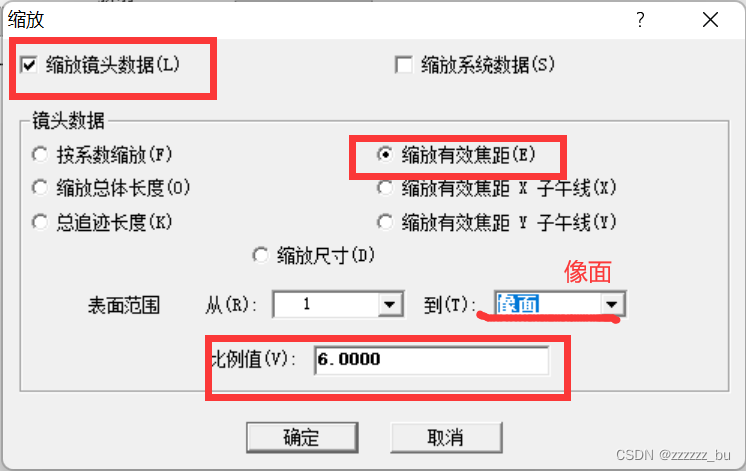
 三. 镜头缩放
三. 镜头缩放
- 在镜头数据管理器(LDM)中选择第一面到像面的表面范围
点击第一面,按住CTRL,再点击像面,然后再选择编辑—缩放,可以看到表面范围直接显示从1到像面
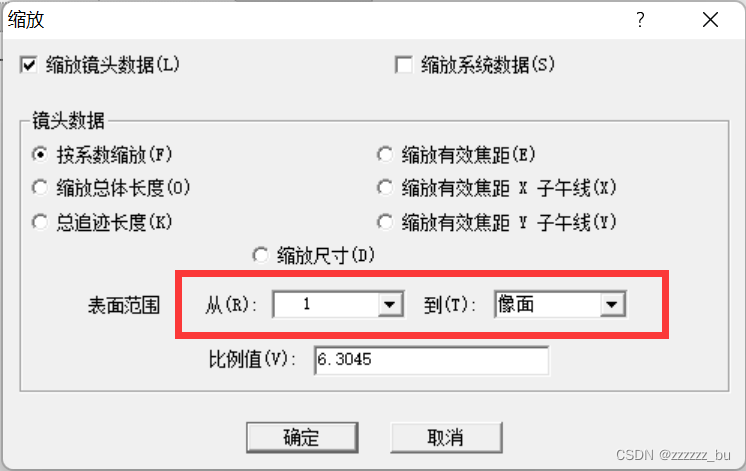
- 或者在缩放中直接选择范围
编辑—缩放
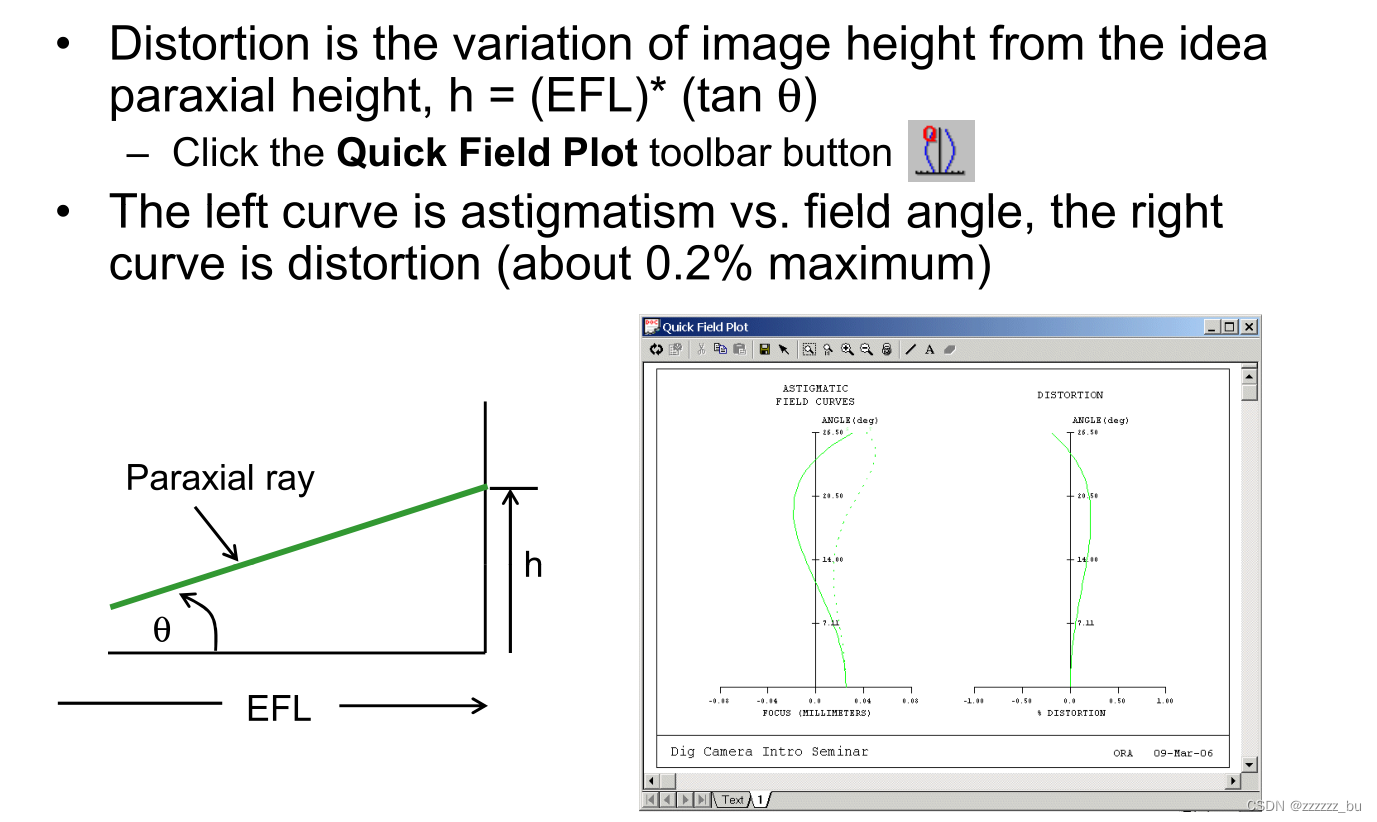
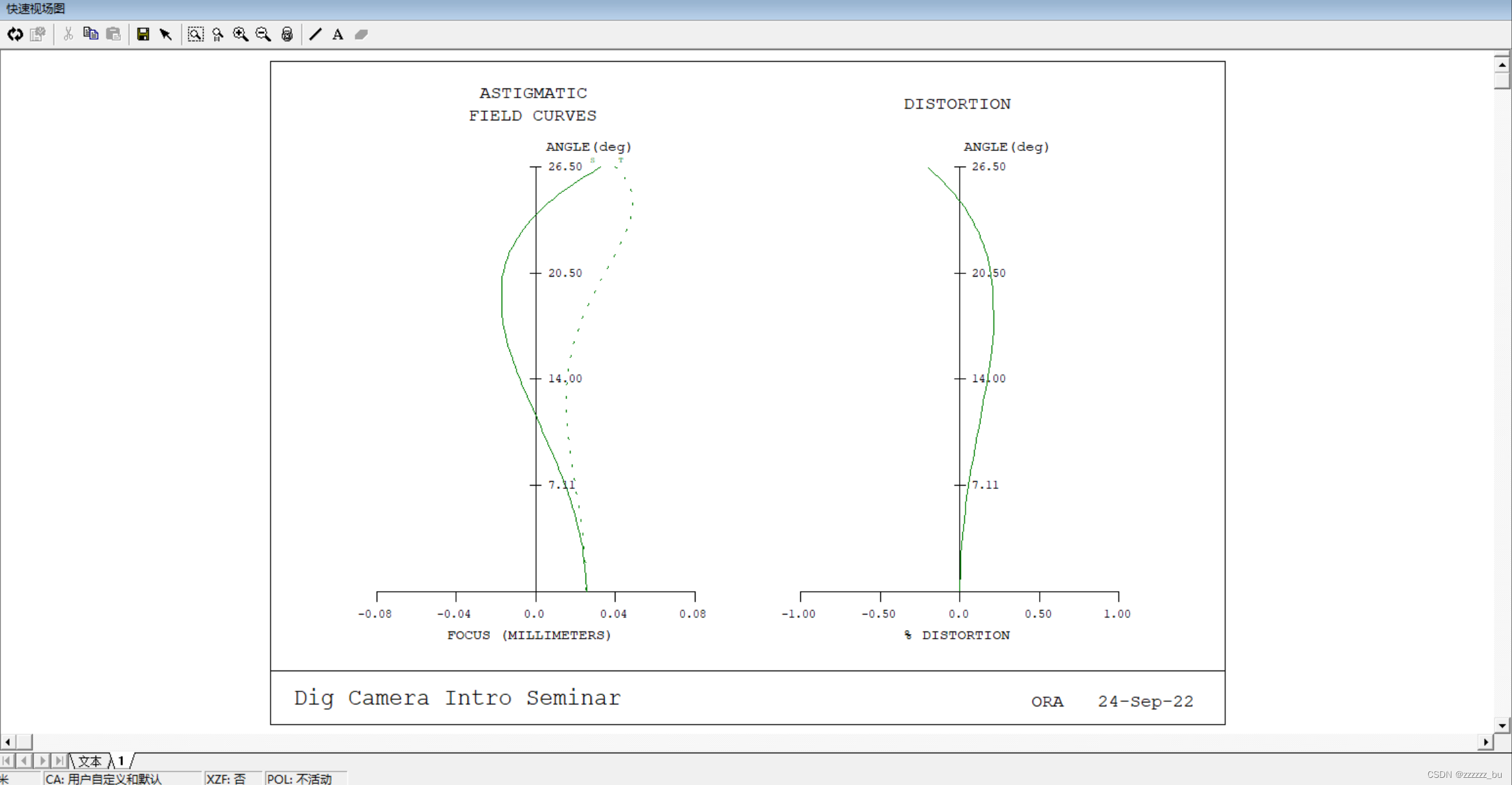
四. 分析畸变
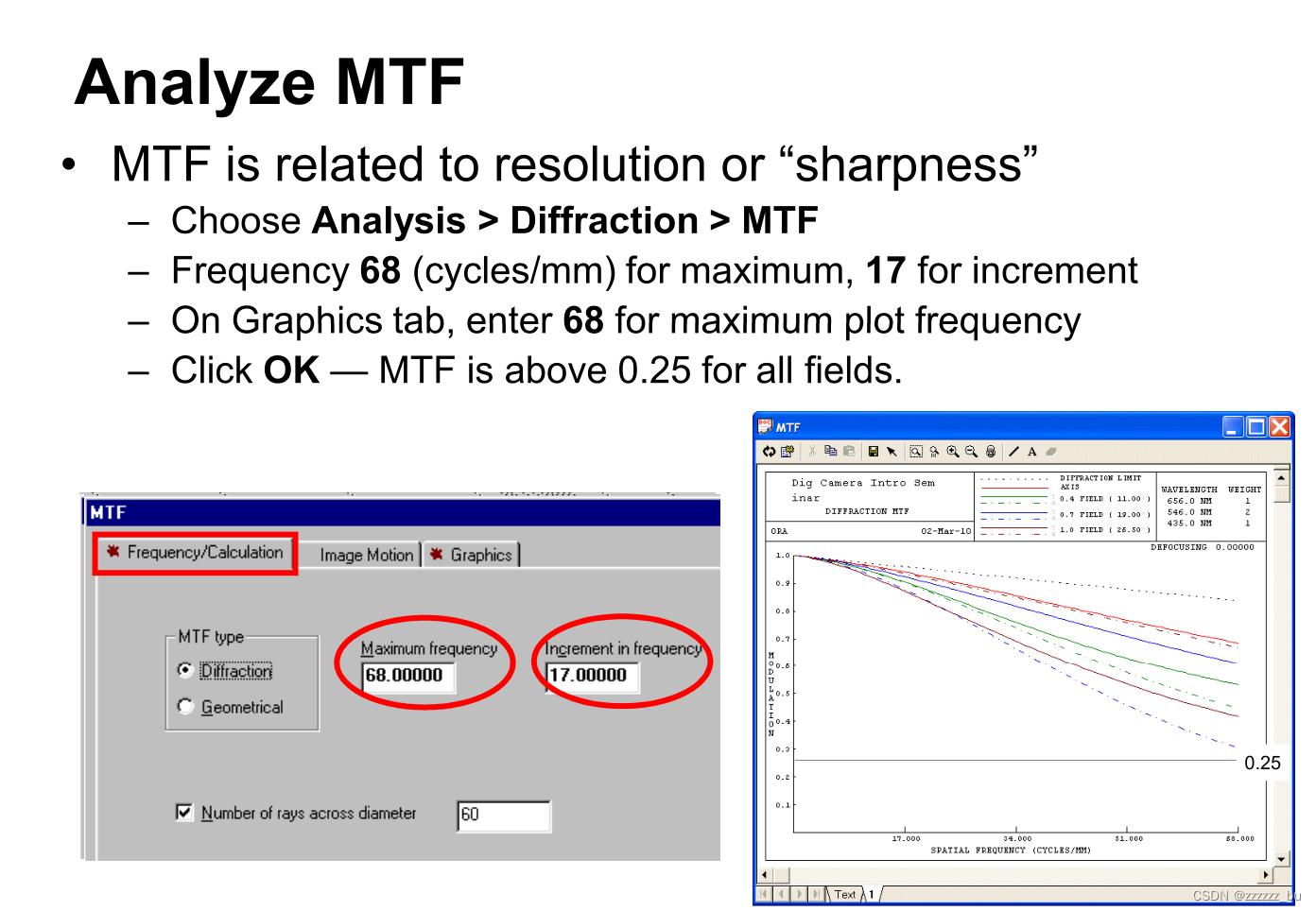
五. 分析MTF
- 选择分析–衍射–MTF,设置参数,最大频率68,频率增量17
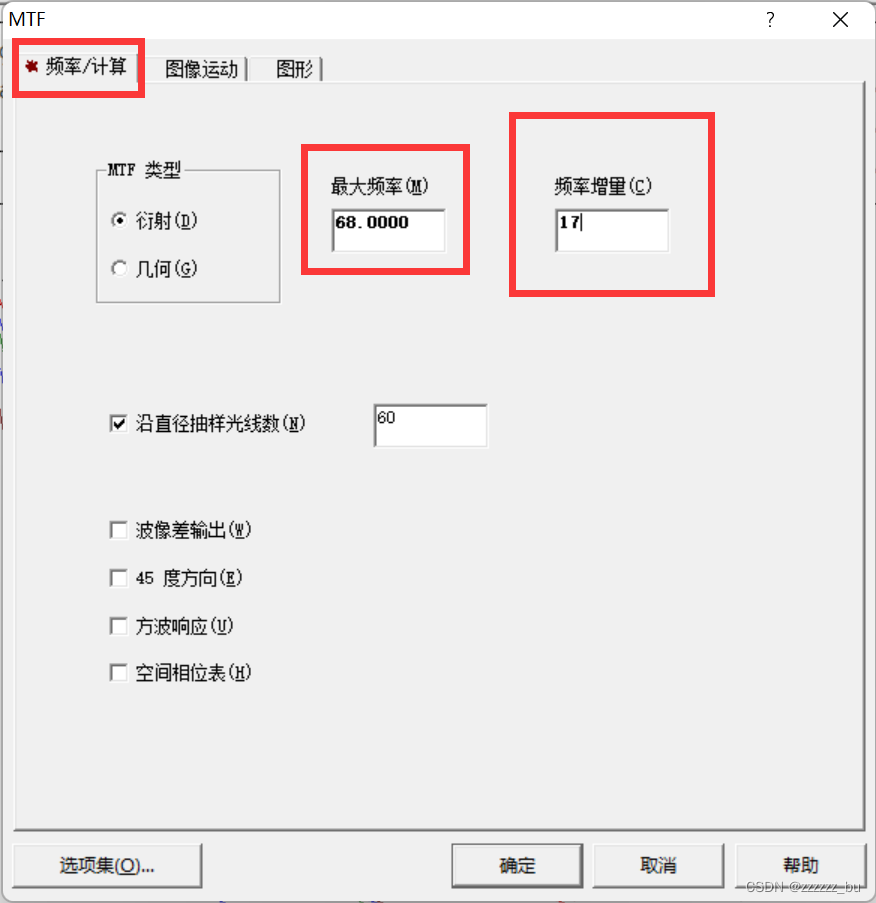
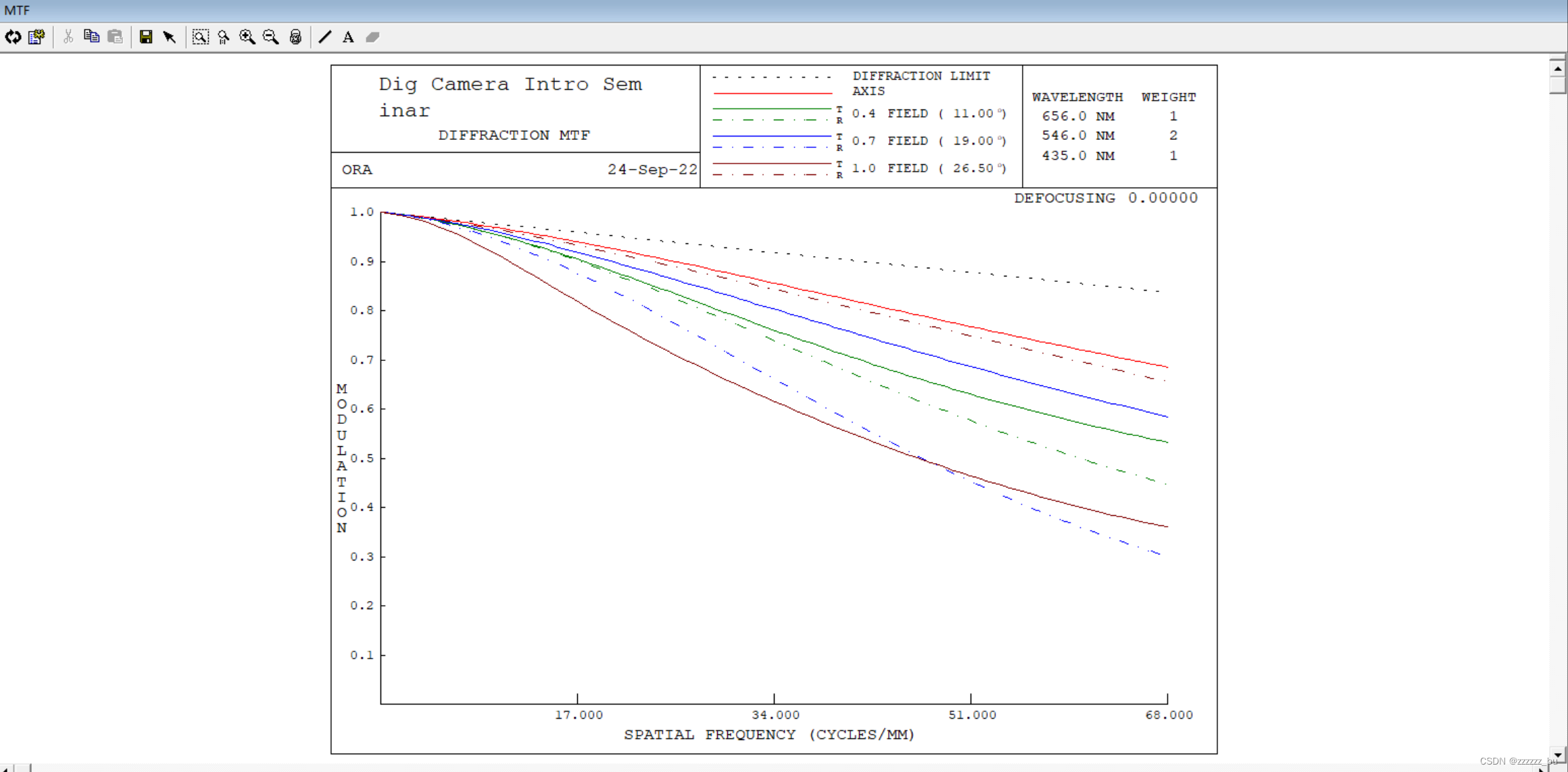
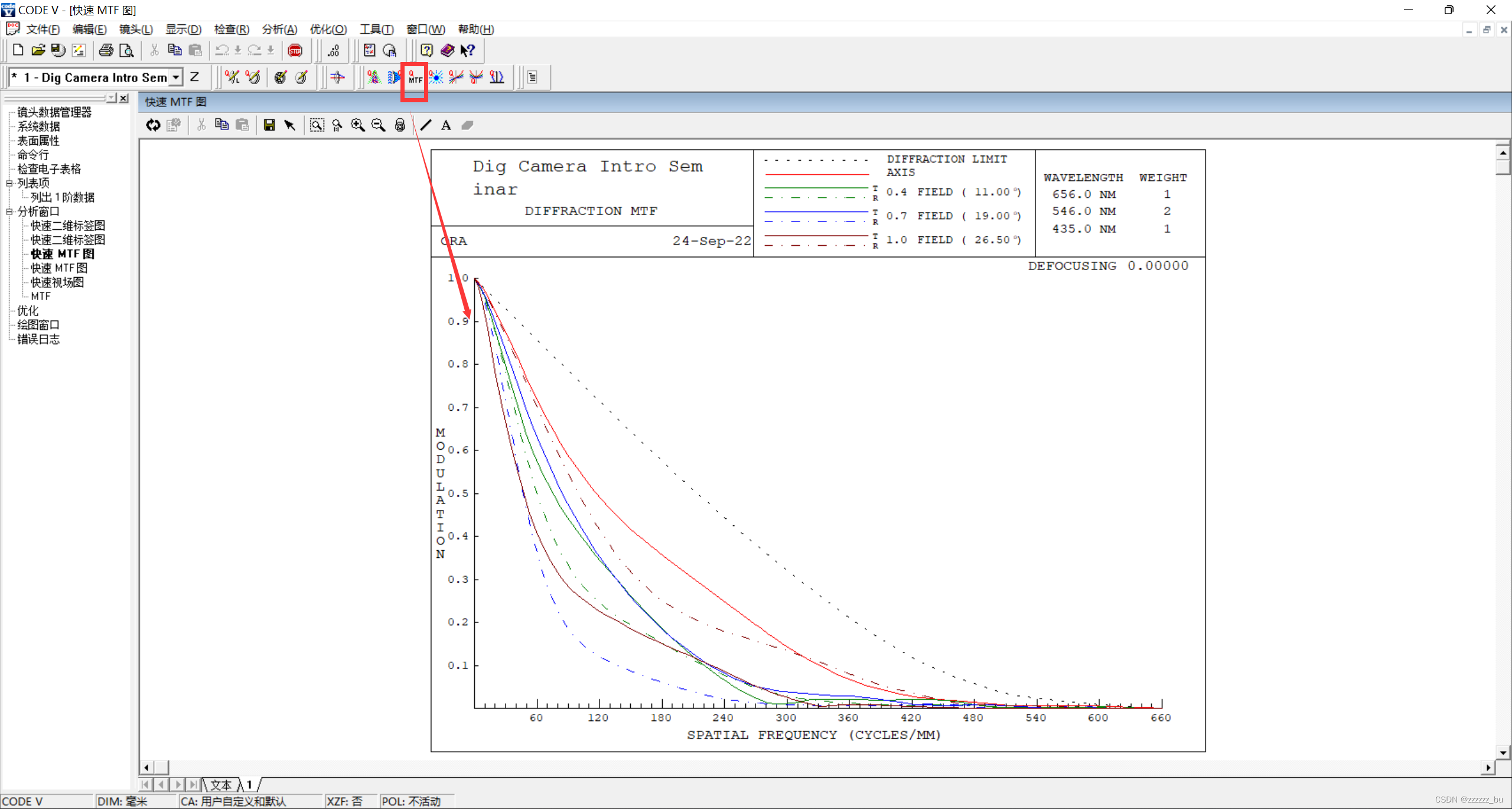
如果直接在工具栏选择快速MTF,好像找不到设置参数的地方,而且图是不一样的
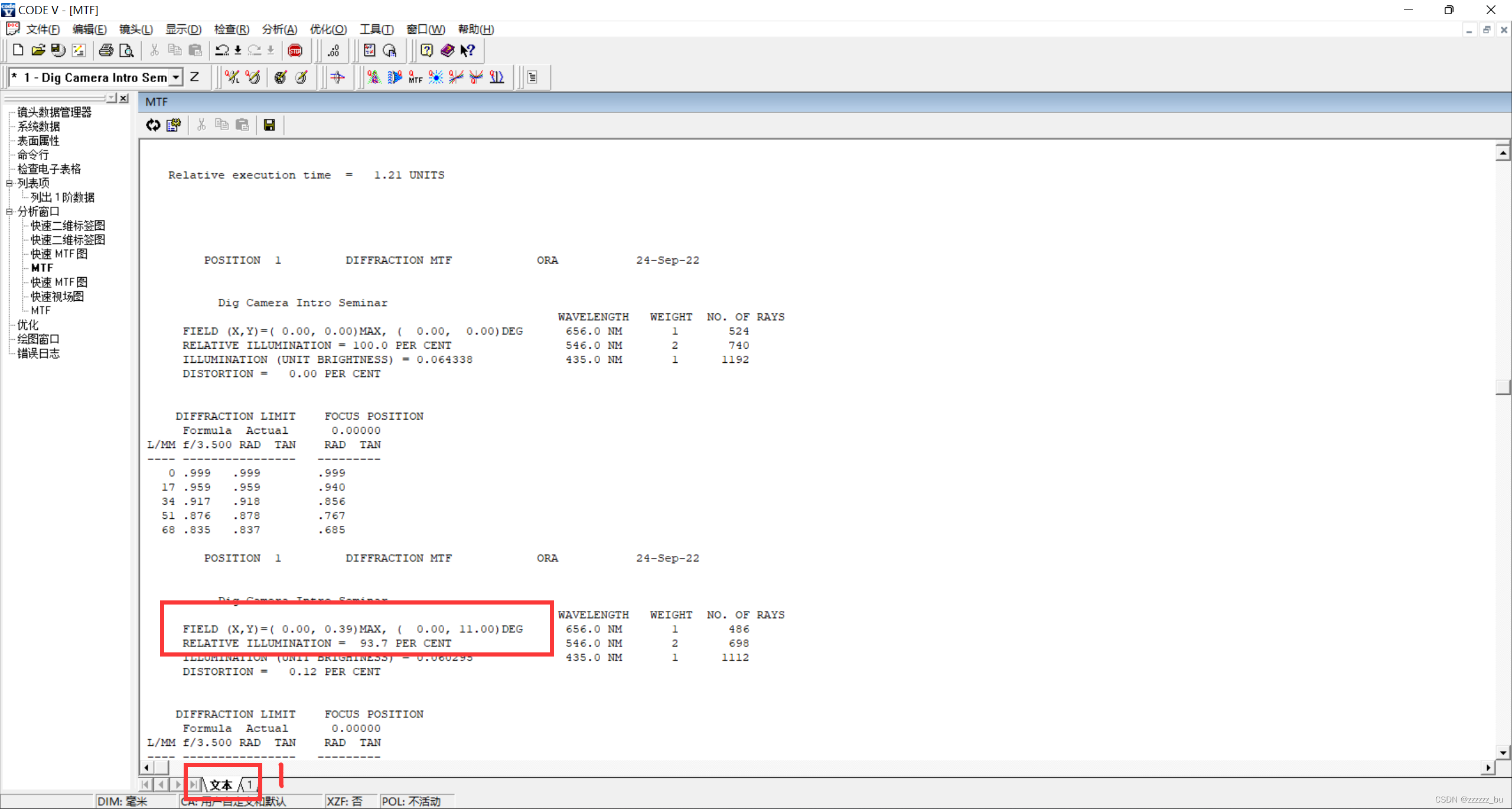
六. 渐晕
- 在MTF中,左下方点击文本,下拉,可以看到相关数据

















 971
971

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









