







 本文详细介绍了利用数学建模解决太阳影子定位问题,涉及模型建立、求解与分析。通过分析太阳影子长度与时间、纬度和日数的关系,建立了结构方程模型,利用最小二乘法和循环遍历法求解不同场景下的直杆地理位置。文章还讨论了模型的优缺点,提供了潜在的改进方向。
本文详细介绍了利用数学建模解决太阳影子定位问题,涉及模型建立、求解与分析。通过分析太阳影子长度与时间、纬度和日数的关系,建立了结构方程模型,利用最小二乘法和循环遍历法求解不同场景下的直杆地理位置。文章还讨论了模型的优缺点,提供了潜在的改进方向。
To be continue … …
主要参考文献:[2015年国赛高教杯奖A题]电子科技大学-太阳影子定位的多目标优化模型
最近用java写了个求影长的程序,原地爆炸

文章目录
一、摘要
本文是一个对太阳影子定位的研究模型。通过对太阳赤纬角、时区分划的计算、研究以及直杆在不同时角下影长的变化,分别建立了基于太阳影子定位的结构方程模型、最小二乘模型和基于分治思想的循环搜索、多目标优化等模型。
首先,本文针对问题一的指定地理位置和日期的直杆影长的变化问题,对影子定位方程进行了简化,利用几何知识建立了太阳影子定位的结构方程。得到影长与纬度、日数和时间三个参数之间的解析关系式。并以天安门广场的直杆为例,在另两个参数一定的情况下,利用MATLAB软件得到影长随参数的变化规律。影长关于时间的变化为先减小后增大,并在正午12点达到最小值;影长关于日数的变化为先减小后增大,夏季影长最短,冬季影长最长;影长关于纬度的变化为在 0 ∘ ∼ 6 0 ∘ ( N / S ) 0^{\circ}\sim60^{\circ}(N/S) 0∘∼60∘(N/S)之间随纬度的变化呈正相关。
其次,针对问题二的日期时角已知而地理位置未知的直杆影长的变化问题,利用最小二乘法建立半搜索模型。通过最小二乘曲线拟合,得到影长随时间变化的多项式函数,利用MATLAB求导得到影长最短的时刻为当地正午12点(北京时间12:35),并根据两地的时差得到当地经度。基于各个时刻影子长度,建立了单目标优化模型,将全球(经纬度)上任一点影长与实际测量值之差的绝对值之和最小为目标函数,约束条件为纬度和杆长的范围,利用半搜索算法,减小搜索范围,得到直杆可能长度,可能的地点(另一种方法是多目标优化,同模型三)。针对问题三,需要由影子顶点坐标确定直杆所处的地理位置和拍摄日期,基于各时刻影长和所测时段内影子方向的变化,基于多目标优化模型建立了循环搜索法,在问题二的基础上,将所测时段内地球上任一点太阳方位角的变化值与实际影子方向角的变化值之差的绝对值之和最小为第二目标函数,约束条件为杆长、经度、纬度和日数范围,利用循环搜索法分别得到可能的杆长、经纬度和日期,残差分析结果表明模型的参数精确度较高。
最后,针对问题四的拍摄视频,先将其转化为AVI格式,利用MATLAB和PS等软件以3分钟为步长,将视频中直杆影子的顶点坐标转换为实际顶点坐标,通过计算机图像处理相关的透视和投影变化的知识进行分析。并利用日期已知和未知的情况,将问题四的求解分别转化为问题二、三,利用搜索算法得到视频中可能的直杆长度、所处的经纬度及拍摄日期。
关键词: 太阳影子定位;最小二乘;二分查找;遍历算法;多目标优化
二、问题重述
1. 问题背景
太阳影子定位技术是指通过分析实际或视频中物体的影子长度变化确定视频拍摄的地点和拍摄日期的一种方法。
2. 需要解决的问题
问题1:建立影子长度变化的数学模型,分析影子长度关于各个参数的变化规律,并应用建立的模型画出2015年10月22日北京时间9:00-15:00之间天安门广场(北纬39度54分26秒,东经116度23分29秒)、3米高的直杆的太阳影子长度的变化曲线。
问题2:根据某固定直杆在水平地面上的太阳影子顶点坐标数据,建立数学模型确定直杆所处的地点。并将模型应用于附件1的影子顶点坐标数据,给出若干个可能的地点。
问题3:根据某固定直杆在水平地面上的太阳影子顶点坐标数据,建立数学模型确定直杆所处的地点和日期。将模型分别应用于附件2和附件3的影子顶点坐标数据,给出若干个可能的地点与日期。
问题4:附件4为一根长3米的直杆在太阳下的影子变化的视频,建立数学模型求解出若干个可能的视频拍摄地点。若拍摄日期未知,能否根据视频确定出拍摄地点与日期?
三、问题分析
问题的研究对象是测量的直杆,研究内容为其影子长度的变化情况。该问题描述了在不同测量的地理位置、时间和日期下影子长度的变化,并在知道影子顶点坐标的情况下求解可能的直杆长度及测量地的经纬度和日期。
3.1 问题一的分析
第一小问:问题中说明影子长度与一些参数有关,这就要求我们寻找影子长度涉及哪些相关参数。首先通过相关名词定义,定义了太阳高度角,并通过太阳高度角找到直杆长度和影长的函数关系。其次根据太阳高度角的计算公式,结合直杆长度和影子长度的解析式,得到影子长度随参数变化的函数表达式。结合表达式研究在某个参数值变化,其而它参数值不变的情况下,得到影子长度的变化规律。
第二小问:问题要求我们在已知一些参数的情况下,求影子长度变化曲线。我们在上述中已经求出影子长度函数表达式,题目要求我们研究时间参数在指定时间内变化的情况下,得到影子长度的变化规律。
3.2 问题二的分析
根据直杆在水平地面上影子的顶点坐标求出其所处的若干个可能地点。由问题一知,影子长度随时间变化曲线图具有二次函数的特点,根据附件1运用最小二乘法拟合得到时间与影子长度的曲线方程,从而得到当地影子长度最短的时刻点(一般地定义当地正午12:00影子长度为最短),根据两地的时差以及北京经度(东八区,约为120°E),即可粗略地计算出当地的经度。
经度已知而杆长和纬度未知,可将问题视为一个优化问题,每个时间点的影子坐标都对应一个影长,从而确定关于影长的单目标函数,使每个地点的影子长度与实际测量值之间的累计绝对值之差达到最小,可考虑通过半搜索方法来减小搜索范围并逐步找到最优解(同模型三)。
3.3 问题三的分析
问题三相对于问题二而言,直杆影长的拍摄日期也是未知的。同样将其视为一个多目标优化问题,确定关于影子长度、影子方向的变化角度为另一目标函数,使每个地点的影子长度、影子方向变化角度与实际测量值间的累计绝对差值达到最小,可通过循环搜索算法来实现,第一次搜索出可能的拍摄地点和日期的大范围,第二次搜索减小经纬度、杆长、日期的搜索范围以及步长(提高精度),逐步减小搜索范围找到最优解。
3.4 问题四的分析
视频中的直杆影子变化是在平面上的像,需要通过计算机图像处理中的透视投影成像的相关知识进行分析,将视频图像中直杆影子的顶点坐标转换为实际的顶点坐标。以3分钟为取样步长,取出视频中直杆影子的顶点坐标,并利用MATLAB和PS等软件转化为实际顶点坐标,问题四就转化为问题二、三的求解,同样地考虑在问题二、三中建立的优化模型,基于分治思想利用计算机遍历算法,通过多次搜索来控制搜索范围从而得到最优解。
四、模型假设
- 假设海拔对影子长度的影响可忽略;
- 问题四中相机拍摄的角度对影子实际长度的测量影响不大;
- 题中所给的直杆顶点坐标数据是实时实地测量得的,是真实可靠的;
- 忽略大气折射的影响;
- 地球自转为匀角速度;
- 太阳光线为平行光.
五、定义与符号说明
5.1 符号说明
| 符号 | 符号说明 |
|---|---|
| h h h | 太阳高度角 |
| L L L | 直杆长度 |
| d d d | 影子长度 |
| φ \varphi φ | 所测地点的地理纬度 |
| α \alpha α | 所测地点的地理经度 |
| δ \delta δ | 赤纬角 |
| ω \omega ω | 时角 |
| t ′ t' t′ | 所测地点时间 |
| t t t | 北京时间 |
| N | 日数(以1月1日为第一天,依次类推) |
5.2 名词解释
太阳高度角:对于地球上的某个地点,太阳高度角是指某地太阳光线与通过该地与地心相连的地表切线的夹角,即太阳光的入射方向和地平面之间的夹角。
赤纬角:赤纬角又称太阳赤纬,是地球赤道平面与太阳和地球中心的连线之间的夹角。
时角:一个天体的时角定义为天子午圈与天体的赤经圈在北极所成的球面角,或在天赤道上所夹的弧度。
六、模型的建立与求解
6.1 模型一:基于太阳赤纬与时差计算的结构方程模型——问题一的求解
6.1.1 建模准备——影子长度计算公式
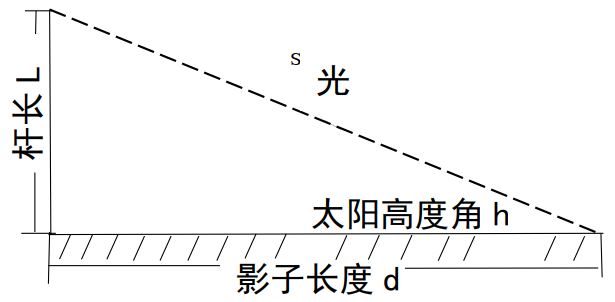
根据太阳高度角定义,太阳角为对于地球上的某个地点,太阳高度角是指太阳光的入射方向和地平面之间的夹角 h h h。根据该定义画出某一点的太阳角、直杆和影子示意图,如图1所示,即可得到太阳高度角与直杆长度和影子长度关系。
tan h = L d (6.1) \tan h=\frac{L}{d}\tag{6.1} tanh=dL(6.1)
太阳高度角计算[1]公式
sin h = sin φ sin δ + cos φ cos δ cos ω (6.2) \sin h=\sin \varphi \sin\delta +\cos \varphi \cos \delta \cos \omega\tag{6.2} sinh=sinφsinδ+cosφcosδcosω(6.2)赤纬角计算[1]公式
sin δ = 0.39795 ⋅ cos [ 0.9853 ⋅ ( N − 173 ) ] (6.3) \sin \delta=0.39795\cdot \cos[0.9853\cdot (N-173)]\tag{6.3} sinδ=0.39795⋅cos[0.9853⋅(N−173)](6.3)即
δ = − 23.4 4 ∘ ⋅ cos ( 360 365 ⋅ ( N + 10 ) ) \delta=-23.44^{\circ}\cdot \cos\big (\frac{360}{365}\cdot(N+10)\big)\\ δ=−23.44∘⋅cos(365360⋅(N+10))时角是以正午12点为0°开始算,且时角每一小时增加15°,即
ω = ( t ′ − 12 ) ⋅ 1 5 ∘ (6.4) \omega=(t'-12)\cdot15^{\circ}\tag{6.4} ω=(t′−12)⋅15∘(6.4)在不同纬度时间不同,计算所测地点时间利用北京时间转化。经度相差1°,时差相差1小时,可得所测地点时间计算公式[2]如下
t ′ = t − 8 + α 1 5 ∘ (6.5) t'=t-8+\frac{\alpha}{15^{\circ}}\tag{6.5} t′=t−8+15∘α(6.5)联立式(6.1)~(6.5),得到影子长度的计算公式
{ d = L ⋅ cot [ arcsin ( sin φ sin δ + cos φ cos δ cos ω ) ] δ = − 23.4 4 ∘ ⋅ cos ( 360 365 ⋅ ( N + 10 ) ) ω = ( t ′ − 12 ) ⋅ 1 5 ∘ t ′ = t − 8 + α 1 5 ∘ (6.6) \begin{aligned} \begin{cases} d=L\cdot\cot\big[\arcsin(\sin\varphi\sin\delta+\cos\varphi\cos\delta\cos\omega)\big]\\ \delta=-23.44^{\circ}\cdot\cos(\frac{360}{365}\cdot(N+10))\\ \omega=(t'-12)\cdot15^{\circ}\\ t'=t-8+\frac{\alpha}{15^{\circ}} \end{cases} \end{aligned}\tag{6.6} ⎩⎪⎪⎪⎨⎪⎪⎪⎧d=L⋅cot[arcsin(sinφsinδ+cosφcosδcosω)]δ=−23.44∘⋅cos(365360⋅(N+10))ω=(t′−12)⋅15∘t′=t−8+15∘α(6.6)
6.1.2 影子长度关于各个参数变化规律
通过以上分析,我们已经给出影子长度 d d d与纬度 φ \varphi φ、日数 N N N、时间 t ′ t' t′三个参数(由于经度影响时区的确定,进而影响当地时刻的确定,故经度对影子长度的影响可转化为区时对影子的影响)之间的关系式,如式(6.6)所示。式(6.6)中影子长度 d d d与各个参数间的解析关系式较为复杂,基于此,我们先确定其中两个参数的值,然后分析影子长度 d d d随余下一个参数的变化规律。故我们列出一下三种情况(其中直杆的高度为3米)。
(1) 纬度 φ \varphi φ与日数 N N N一定,影子长度 d d d随时间 t ′ t' t′变化规律
我们假设地点为北京天安门广场(北纬39度54分26秒,东经116度23分29秒),日期为2015年10月22日,直杆高度为3米。由于北京时间为东经120度下的区时,故我们先将其转化为东经116度23分29秒位置下的时间。基于(6.4)式,具体的转化公式为:
t ′ = t − 8 + 116 + 23 / 60 + 29 / 3600 1 5 ∘ (6.7) t'=t-8+\frac{116+23/60+29/3600}{15^{\circ}}\tag{6.7} t′=t−8+15∘116+23/60+29/3600(6.7)式中, t t t为北京时间。
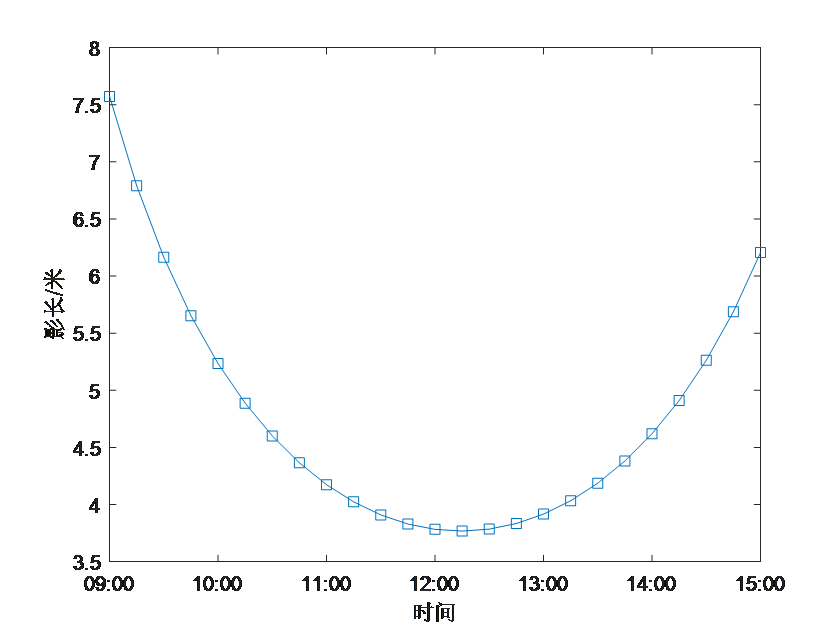
观察图2,在北京时间9:00-15:00的时间段内影子长度呈先减小后增大的趋势,正午12点时刻达到最小值3.782米,9:00和15:00影子长度分别为7.573 米和6.207米。
clear
clc
%问题一
H=3;%杆长3m
%计算2015年10月22日北京赤纬-11.5637度
sigma=asind(0.39795*cosd(0.98563*(295-173)));
phi=dms2degrees([39,54,26]);%纬度:度分秒转化为度
alpha=dms2degrees([116,23,29]);%经度:度分秒转化为度
t=9:0.25:15;%每间隔15min测量一次
omega=15*t+alpha-300;
L=H*cotd(asind(sind(phi)*sind(sigma)+cosd(phi)*cosd(sigma).*cosd(omega)));
num=length(L); %数据的点数是数列的长度
N0=datenum([0 0 0 9 0 0]); %起始时间9:00
dN=datenum([0 0 0 0 15 0]);
N=N0+(0:num-1)*dN; %根据数据点数,产生15分钟间隔时间点
plot(N,L,'s-');
datetick(gca,'x','HH:MM');
xlabel("时间")
ylabel("影长/米")
(2) 纬度 φ \varphi φ与时间 t ′ t' t′一定,影子长度 d d d随天数N的变化规律
北京天安门广场(北纬39度54分26秒,东经116度23分29秒)为测量地点、正午12时为测量时间、3米为测量直杆长度,天数以15天为间距记录影子长度,作出一年的影子长度随天数变化曲线图。如图下3所示。
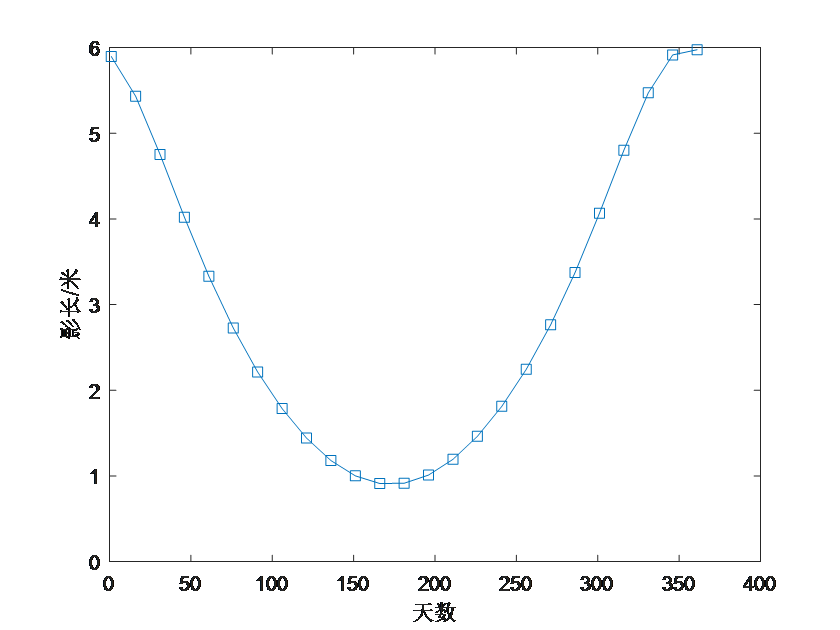
通过上图3,可以观察到从第一天起(1月1号为第一天),影子长度随着天数增加而减少,到了第173天(此时为6月22日夏至日),影子长度最短。这天之后,影子长度变为随着天数增加而增加的变化规律。
clear
clc
%问题一第2小问灵敏度分析2,此时改变天数N
H=3;%杆长3m
%计算随天数N改变时北京的赤纬
N=1:15:365;
sigma=asind(0.39795.*cosd(0.98563.*(N-173)));
phi=dms2degrees([39,54,26]);%纬度:度分秒转化为度
alpha=dms2degrees([116,23,29]);%经度:度分秒转化为度
t=12;%以正午12点为例进行灵敏度分析
omega=15*t+alpha-300;
L=H*cotd( 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









