







 本教程详细介绍了如何使用MATLAB的Simulink和Simscape工具箱,结合SimscapeMultibodyContactForcesLibrary和SimscapeMultibodyPartsLibrary,创建一个自由落体小球碰撞平面的三维物理仿真模型。通过设置小球和接触平面的参数,调整6-DOFJoint和板子属性,完成模型构建。最后运行仿真,观察并分析小球的运动轨迹和碰撞效果。
本教程详细介绍了如何使用MATLAB的Simulink和Simscape工具箱,结合SimscapeMultibodyContactForcesLibrary和SimscapeMultibodyPartsLibrary,创建一个自由落体小球碰撞平面的三维物理仿真模型。通过设置小球和接触平面的参数,调整6-DOFJoint和板子属性,完成模型构建。最后运行仿真,观察并分析小球的运动轨迹和碰撞效果。
一. 简介
- 本实例使用MATLAB/Simulink里面的simscape,实现自由落体小球碰撞平面的三维物理仿真,可用于新手入门simscape的参考示例。

二. 准备工作
-
需要安装的工具箱
(1)【Simscape】
(2)【Simscpae Multibody】
(3)【Simscape Multibody Contact Forces Library】
(4)【Simscape Multibody Parts Library】 -
【Simscape】和【Simscpae Multibody】,这两个一般在安装Matlab时就已经安装好了,查看是否存在的方法见下图。(如果没有的话,参考下面安装其他工具箱的方法)


- 【Simscape Multibody Contact Forces Library】安装
(1)在【附加功能】里面点击【获取附加功能】如图所示。

(2)在【搜索框】里输入Simscape Multibody Contact Forces Library,如图所示。

(3)出来的第一个就是,点击进去。

(4)由于我这里已经安装过了,所以显示已安装,且右边没有【添加】选项。在未安装的情况下,显示如下图中第二幅图片所示,图片右边显示【添加】选项,点击【添加到MATLAB】选项,然后就会显示下面第一幅图片中所示的那样,即安装成功。


4. 【Simscape Multibody Parts Library】安装
- 步骤参考【Simscape Multibody Contact Forces Library】安装步骤,基本一致,所以此处不再赘述。
三. 建立小球接触平面的模型(演示的MATLAB版本是2019b)
- 打开【MATLAB】——点击【simulink】——建立如下图图一所示模型——删除下图图二红色方框里面的东西(选中按Delete键就行)——按下图图三所示连接好模块(所需模块在左侧Library Browser里面找,即绿色框选部分)



四. 设定模型参数
- 设定小球参数——双击小球①——修改小球半径②——选定小球颜色③,在④中选择自己喜欢的颜色即可

2. 双击【6-DOF Joint】①——修改z轴偏移量,值为2m按②所示修改参数

3. 改变板子的参数,双击①——②里面参数改为3x3x0.1 m——在③中更改板子的颜色

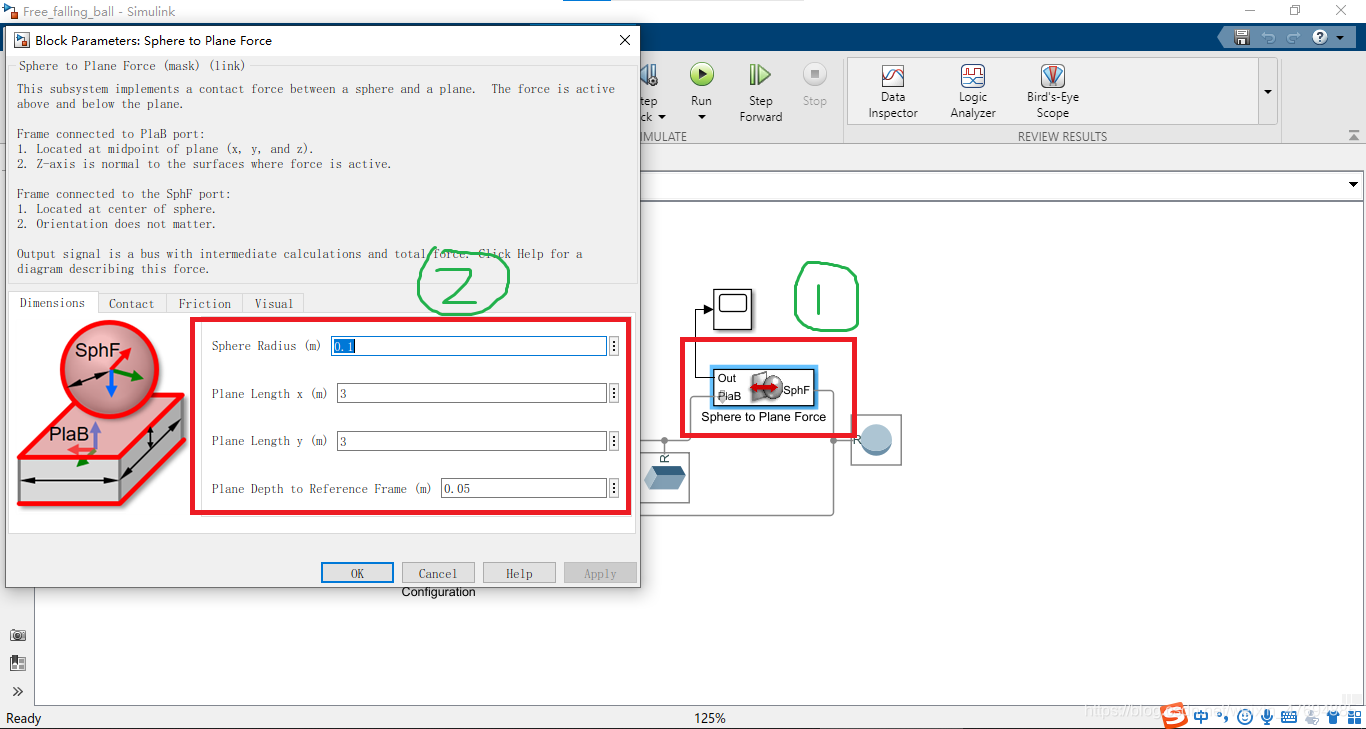
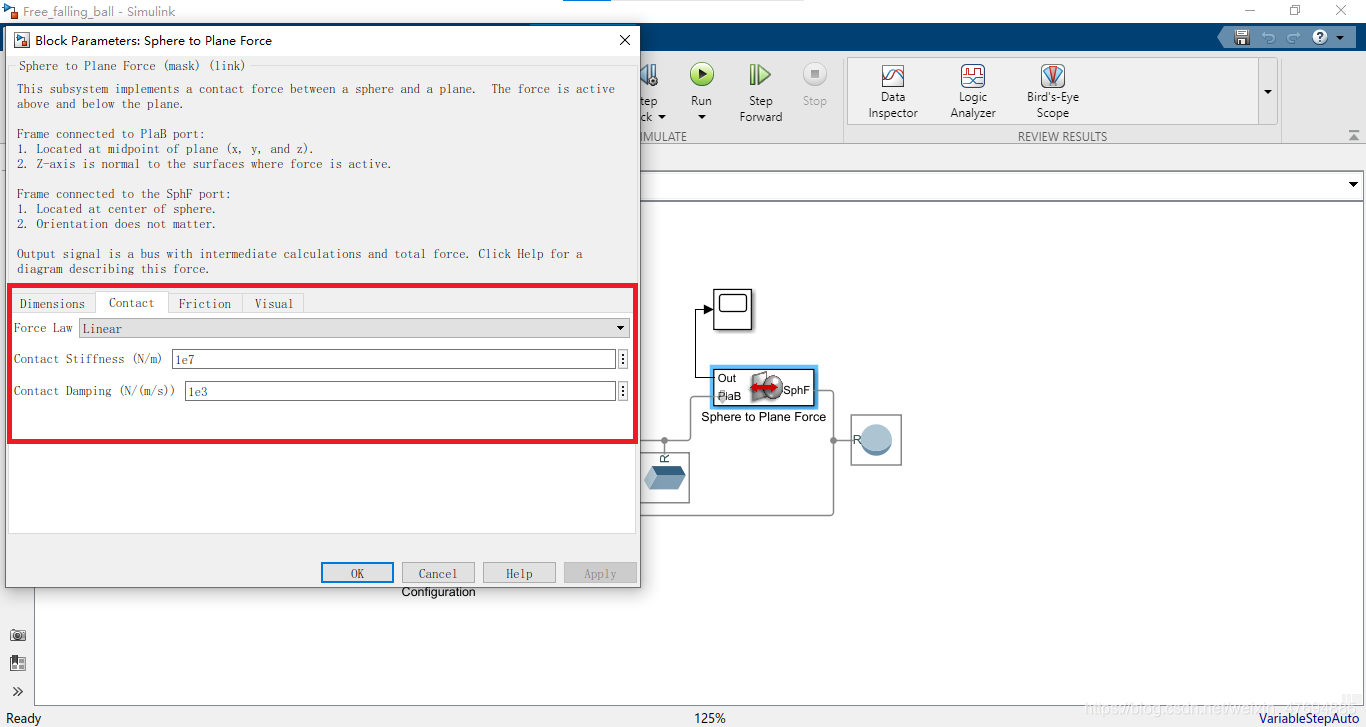
4. 双击①,按下图更改参数

五. 点击【run】运行程序

六. 仿真结果见视频
- 仿真视频链接
- 仿真代码链接:https://pan.baidu.com/s/1ElNkMqXT3pER3ONE9U8p8A 提取码:1234 复制这段内容后打开百度网盘手机App,操作更方便哦–来自百度网盘超级会员V4的分享

















 646
646

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









