






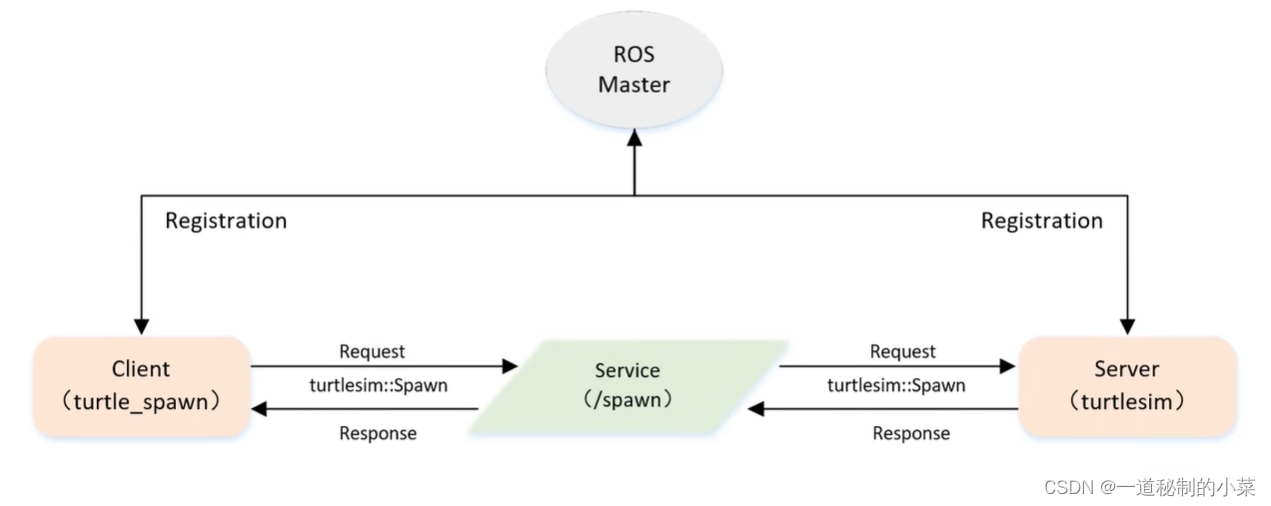
一、服务模型(客户端/服务器)
二、实现步骤
1. 创建功能包
$ cd ~/catkin_ws/src
$ catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim创建后如下所示:
2. 创建客户端代码(C++)
实现一个客户端
- 初始化ROS节点;
- 创建一个Client实例;
- 发布服务请求数据;
- 等待Sever处理之后的应答结果
创建的C++代码如下:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
*/
#include <ros/ros.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "turtle_spawn");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
// 初始化turtlesim::Spawn的请求数据
turtlesim::Spawn srv;
srv.request.x = 2.0;
srv.request.y = 2.0;
srv.request.name = "turtle2";
// 请求服务调用
ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]",
srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
};3. 配置客户端代码编译规则
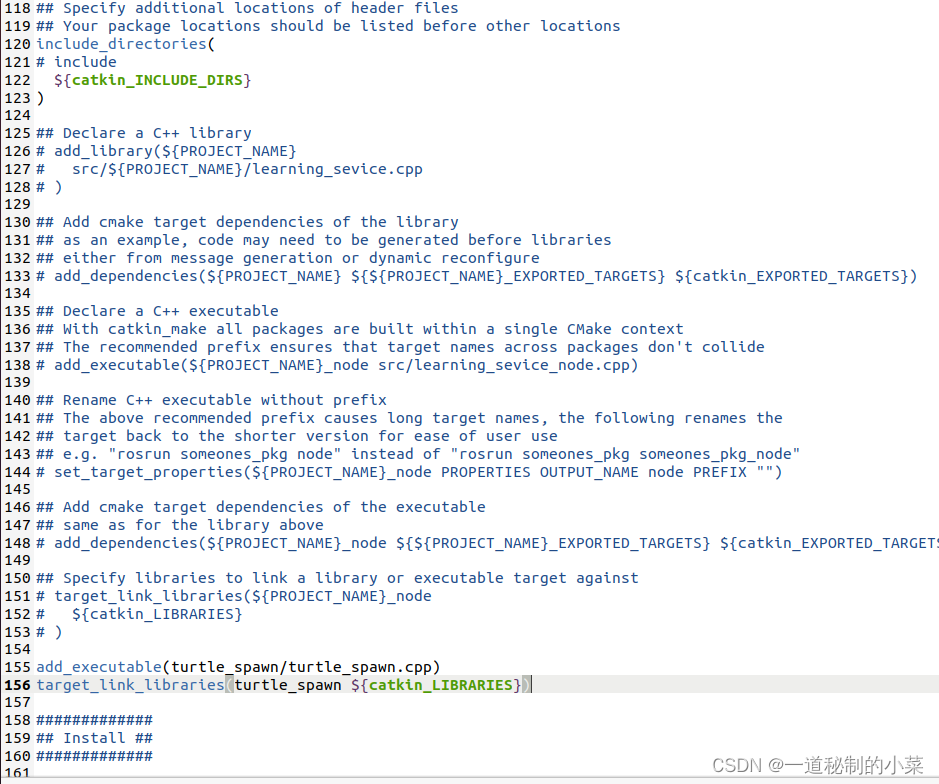
配置CMakeLists.txt的编译规则
- 设置需要编译的代码和生成的可执行文件
- 设置链接库
相对应的需要添加的代码如下所示:
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})添加至对应的Build下面
4. 编译并运行客户端
然后在工作空间catkin_ws下可以进行catkin_make编译,我们可以在工作空间catkin_ws/devel/lib/learning_service找到我们通过第一条CMakeList指令将cpp文件生成的可执行文件
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
$ roscore
$ rosrun turtlesim turtlesim_node
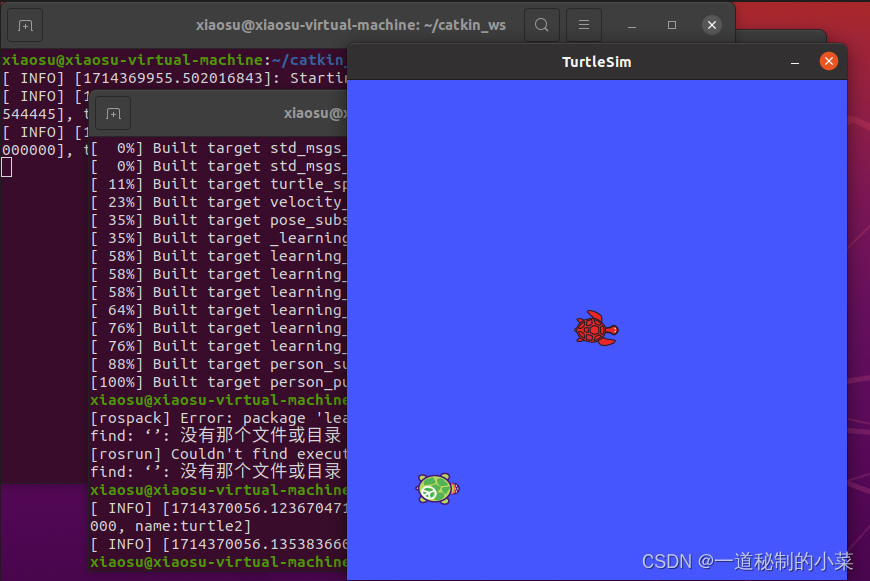
$ rosrun learning_service turtle_spawn运行后会出现两只海龟
5. Python实现两只海龟
代码如下
#!/usr/bin/env python
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
import sys
import rospy
from turtlesim.srv import Spawn
def turtle_spawn():
# ROS节点初始化
rospy.init_node('turtle_spawn')
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/spawn')
try:
add_turtle = rospy.ServiceProxy('/spawn', Spawn)
# 请求服务调用,输入请求数据
response = add_turtle(2.0, 2.0, 0.0, "turtle2")
return response.name
except rospy.ServiceException, e:
print "Service call failed: %s"%e
if __name__ == "__main__":
#服务调用并显示调用结果
print "Spwan turtle successfully [name:%s]" %(turtle_spawn())
















 247
247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











