






轨迹优化
学习来源:
Minimum Snap轨迹规划详解(1)轨迹规划入门_minimum snap trajectory generation and control for-CSDN博客
·多项式轨迹
- 轨迹一般用n阶多项式来表示:
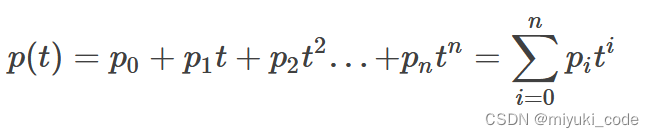
写成向量形式为:

由此可以根据轨迹计算出速度、加速度、jerk、snap(分别为1,2,3,4阶导数)

一般来说轨迹分为多段,用多个多项式表示,而minimumsnap轨迹规划的目的就在于求解轨迹多项式参数p1-pk

对轨迹要求:
- 两段轨迹之间连续
- 轨迹经过固定点
- 轨迹无碰撞
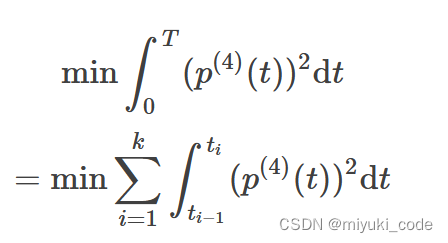
- 可能还有其他要求,比如轨迹顺滑、能量最优等,minimum snap优化目标为最小化四阶导
- 优化函数:(之所以加入平方是为了转化成对角矩阵形式,代码中体现为时间差的幂次和)
约束条件:
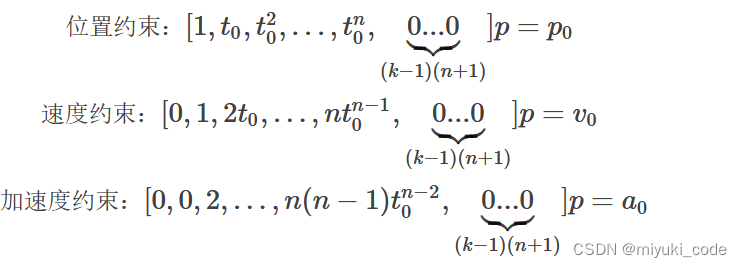
如上图所示为对起点的约束,左侧为时间向量与多项式系数向量的点乘,而p为所有参数,因此后面补0,对起始位置、速度、加速度进行约束。
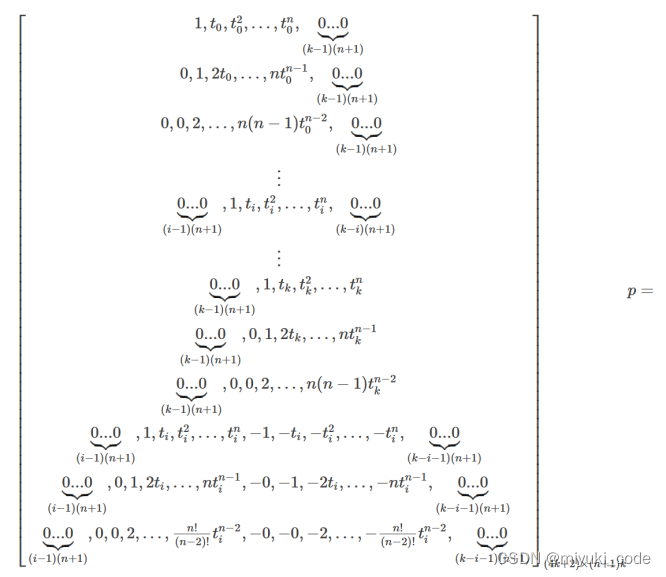
还可以加上相邻段的连续性约束:(类似于令分段函数连续)

最终得到的约束为:(起终点位置速度加速度6+终点固定点[k-1]+分段连续点的位置速度加速度)
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









