






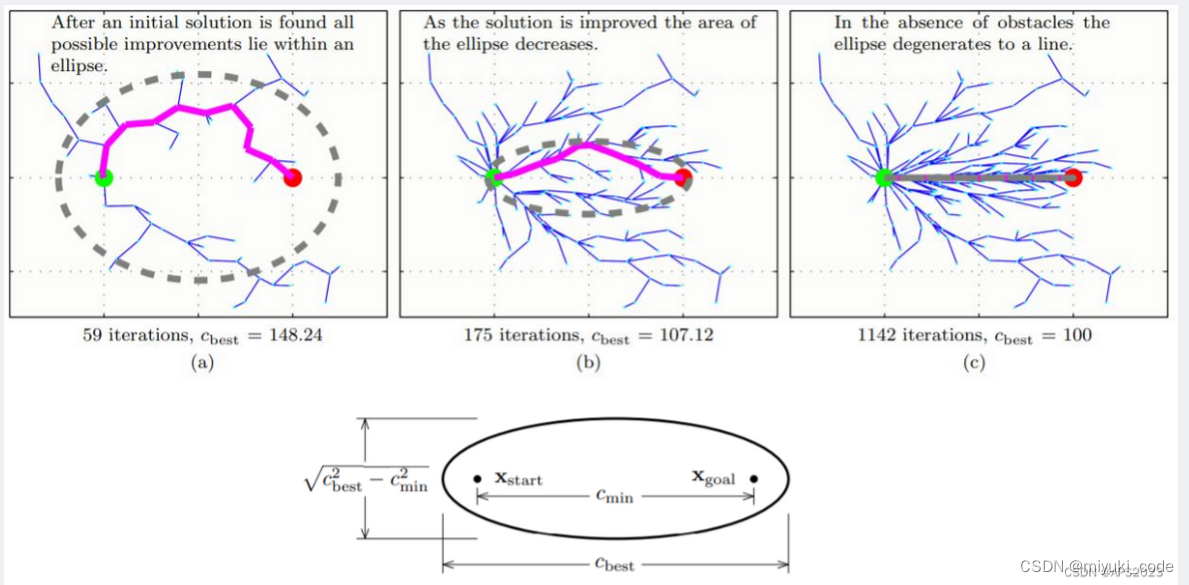
·动机:是否能增加找到渐近最优路径的速度
·思路:通过限制采样范围增加最优速度,在找到路径后限制采样范围,长轴为cbest,短轴为起点到终点的距离,cbest越来越小采样范围也会越来越小,与RRT*相比改变了采样函数
·算法流程图:
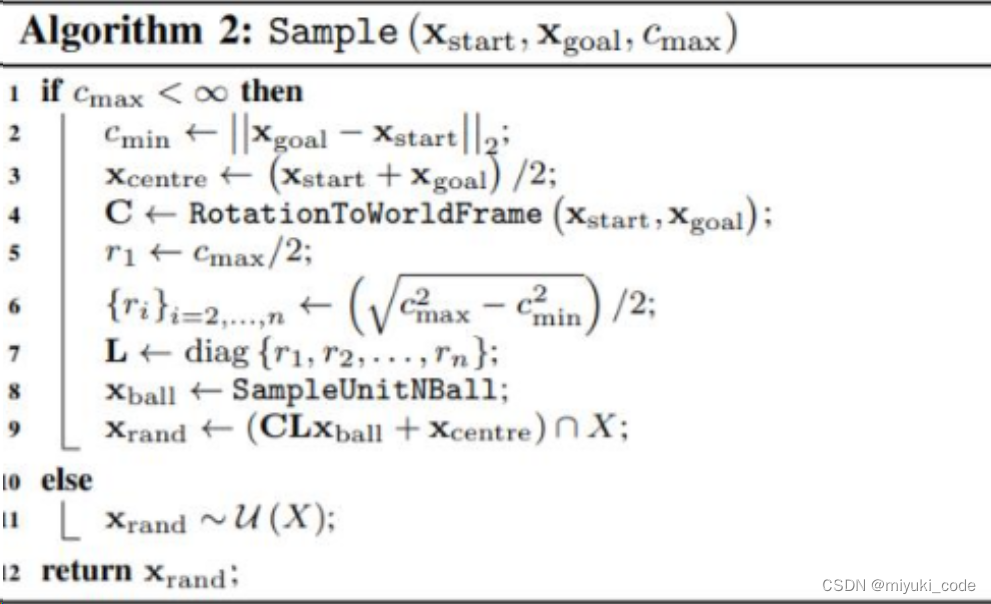
- 若存在已知路径则进行采样空间的缩减
- 计算起终点欧几里得距离、椭球中心点
- 计算旋转矩阵,用于将标准单位圆球中点旋转到椭球体坐标系
- 计算长轴半径r1
- 计算椭球体其他轴半径ri,这里的其他半径指的是垂直于长轴的其他短轴,用于确定椭球体在其他方向的延展,如果是三维空间,n=3,短轴有r2,r3两个(类似三维直角坐标系)
- 构造对角矩阵
- 在单位球内采样(现在单位球内采样可以保持均匀性且方便线性变换)
- 变换到椭球系中
- 若没有已知路径则在整个工作空间内随机采样















 1787
1787

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









