







轮廓检测
1.1轮廓检测的作用:
- 可以检测图图像或者视频中物体的轮廓
- 计算多边形边界,形状逼近和计算感兴趣区域
1.2方法
- 为了更精确地提取轮廓,请使用二值图。也就是说,在使用轮廓提取函数前,请将源图片运用阈值进行二值化(cv2.threshold())或者采用Canny边缘检测。
- findContours 函数会修改源图片,如果希望在轮廓检测后继续使用源图片,务必提前保存在另一个变量中。
- 在OpenCV中,轮廓检测视作从黑色背景中提取白色的物体,所以,在结果中,白色表示物体,黑色表示背景。
cv2.findContours(img,mode,method)
mode:轮廓检索模式
- RETR_EXTERNAL :只检索最外面的轮廓;
- RETR_LIST:检索所有的轮廓,并将其保存到一条链表当中;
- RETR_CCOMP:检索所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二层是空洞的边界;
- RETR_TREE:检索所有的轮廓,并重构嵌套轮廓的整个层次;
使用最多的就是第四种:RETR_TREE
method:轮廓逼近方法
- CHAIN_APPROX_NONE:以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。
- CHAIN_APPROX_SIMPLE:压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
cv_show(thresh,'thresh')
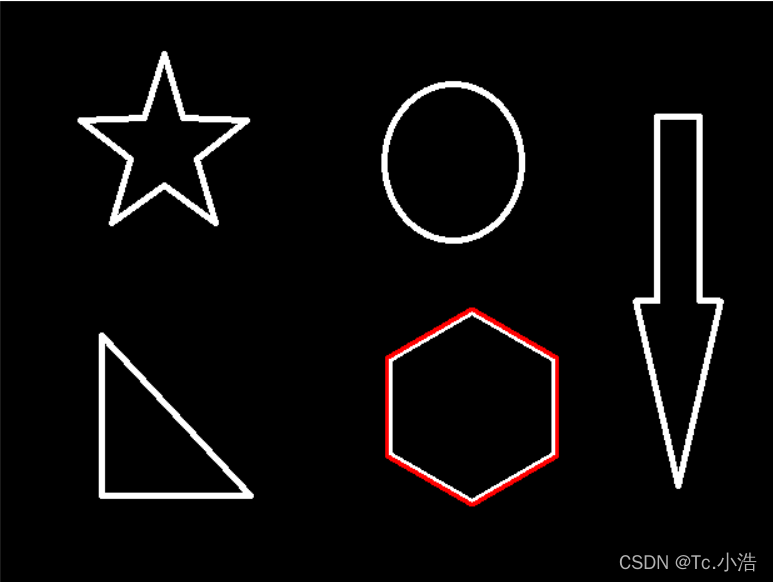
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
#传入绘制图像,轮廓,轮廓索引,颜色模式,线条厚度
# 注意需要copy,要不原图会变。。。
draw_img = img.copy()
#-1表示全部图像的轮廓,0表示第一图像的轮廓外围,1表示第一个图像的内围,2表示第二个图像的外围...
res = cv2.drawContours(draw_img, contours, 2, (0, 0, 255), 2)
cv_show(res,'res')
1.3轮廓特征
根据上面得到的图像信息
#数字表示图片中的轮廓[0,1]表示第一个轮廓的外围和内围,与上面获取轮廓规则一样
cnt = contours[2]
#面积
cv2.contourArea(cnt)
#周长,True表示闭合的
cv2.arcLength(cnt,True)
# 外接矩形
x, y, w, h = cv2.boundingRect(cnt)
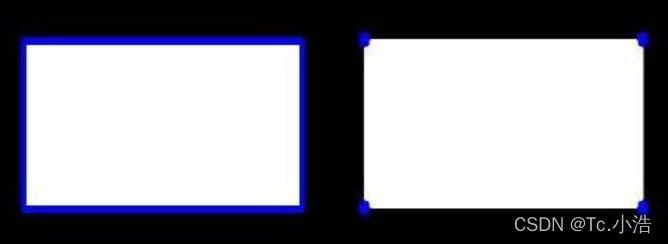
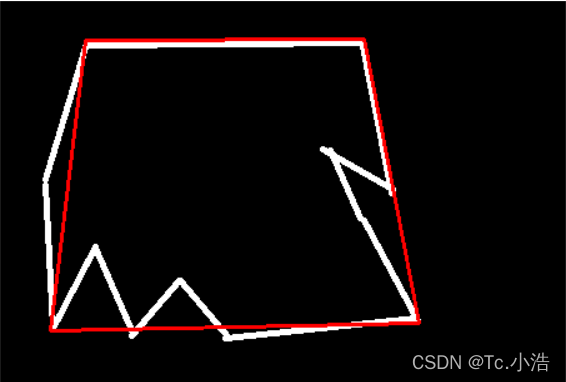
1.4轮廓近似
将轮廓形状近似到另外一种由更少点组成的轮廓形状,新轮廓的点的数目由我们设定的准确度来决定,用的Douglas-Peucker算法。
import cv2
import numpy as np
img = cv2.imread('contours2.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
draw_img = img.copy()
res = cv2.drawContours(draw_img, [cnt], -1, (0, 0, 255), 2)
cv_show(res,'res')

epsilon = 0.1*cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt,epsilon,True)
draw_img = img.copy()
res = cv2.drawContours(draw_img, [approx], -1, (0, 0, 255), 2)
cv_show(res,'res')

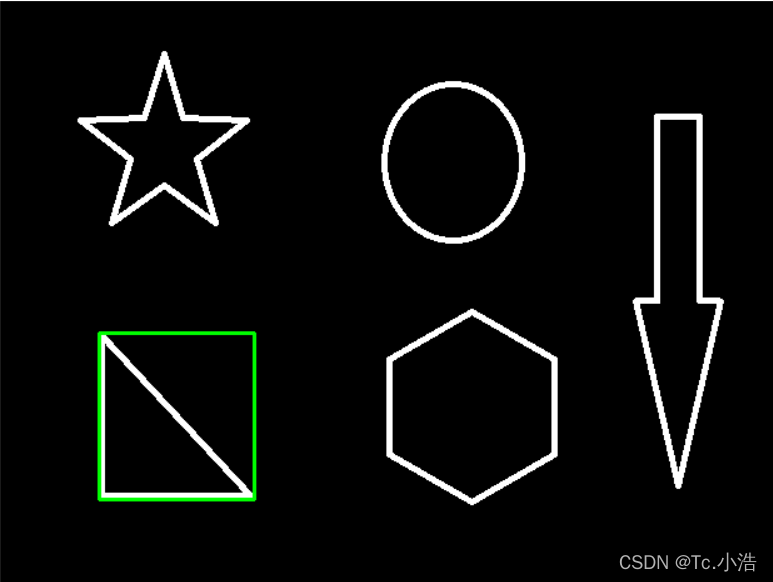
1.5边界矩阵
#传入图像
img = cv2.imread('contours.png')
#二值操作
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
#图像轮廓
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
cnt = contours[0]
x,y,w,h = cv2.boundingRect(cnt)
img = cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
cv_show(img,'img')
外接圆
(x,y),radius = cv2.minEnclosingCircle(cnt)
center = (int(x),int(y))
radius = int(radius)
img = cv2.circle(img,center,radius,(0,255,0),2)
cv_show(img,'img')


















 25万+
25万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











