







上一次简要提到了MTI滤除静态杂波的仿真,但是使用单一的脉冲重复频率,当目标的速度处于盲速或者很小接近于零时将无法被检测出。所以可以通过设置多重频来解模糊避免这个问题。在《雷达系统分析设计matlab仿真》中对解模糊有很清楚的解释。简而言之,就是设置多个脉冲重复频率,这些频率的倍数要满足互质的关系,如,
称为参差比。对应每个PRF会测出一个模糊速度,也有可能是盲速。只需要一直用四个测量速度和最大无模糊速度往回折算。
当折算到四个速度都相等时(可能会有很小的误差),该速度就是目标的真实速度。
利用一维集法可以完成上述过程,他的主要思想就是用多个重频将目标所有可能的速度值都列举出来,假设有4个重频,就会得到4组速度值,然后从这4组速度值中找出最可能是目标真实距离的n个值。例如我们假设有个目标的真实速度为58m/s,这里利用四重频测量到的四组速度值,分别为:
将这四组值,按照从小到大的顺序进行排列,得到一个1*32的向量,因为使用了四个重频,故一定会有四个非常接近的值,以四个值为一组依次求方差。因为会有四个非常接近的真实值,故方差最小的一组值就是目标的真实速度。上述例子中的[58,58,58,58]就是待测目标的真实速度。当然利用多重频并不能消除速度模糊,只是增大了最大无模糊速度,如前面所说,两重频
,那么他的最大无模糊速度将会增加到:
下面是matlab对该过程的仿真,32个脉冲,8个为1组分为四组,设置四个重频。
假设目标的速度为1000m/s
参差比为2:3:5:7。测出的四个模糊速度如下
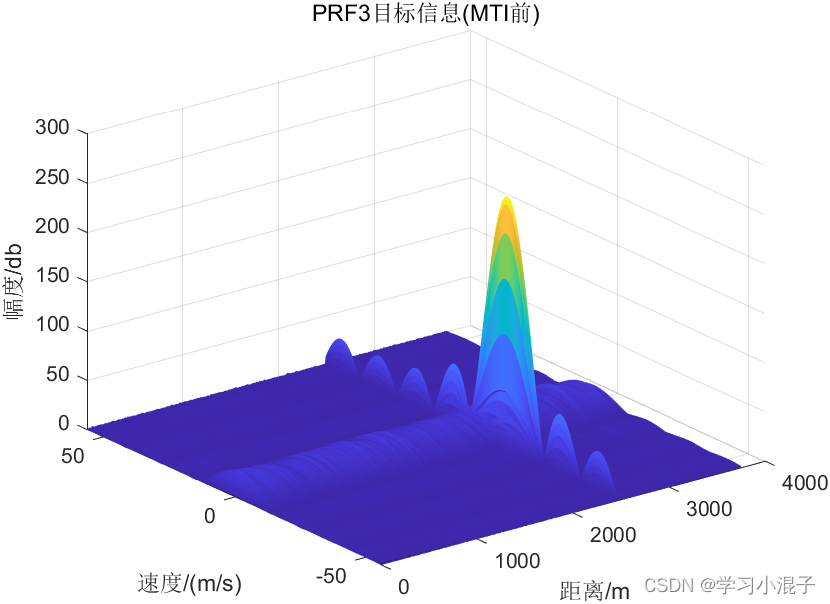
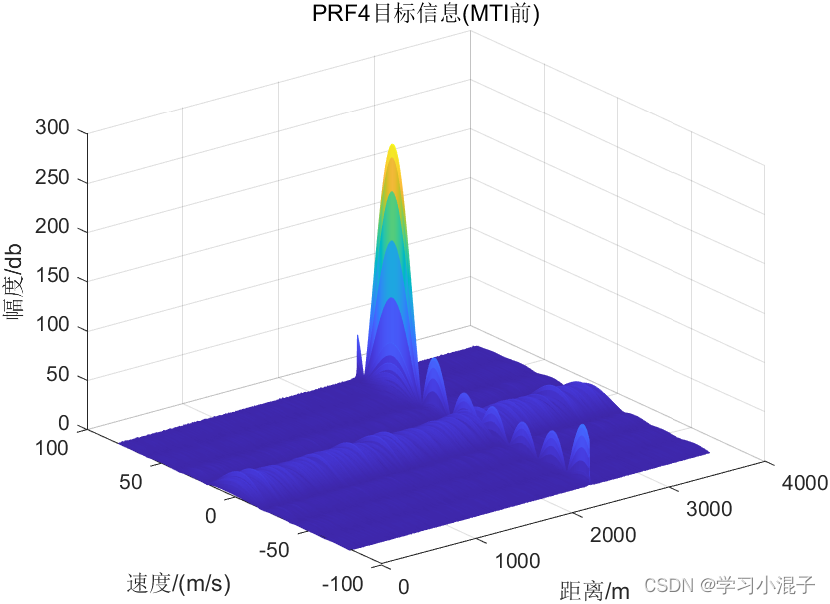
测量速度Vmes= [9.448,-13.051,-13.07,54.60]
%% 四重频解模糊
Vmeas = [vMeas1,vMeas2,vMeas3,vMeas4]';
Vmax = [vMax1,vMax2,vMax3,vMax4]';
VReal =(-30:30).*Vmax+Vmeas;
Varray = sort(VReal(:));
for n = 1:length(Varray)-3
D(n) = var(Varray(n:n+3,1));
end
[~,y] = find(D==min(min(D)));
vreal = mean(Varray(y:y+3,1));
rMeas = rMeas + fc*Tp*vreal/B;最后解出的真实速度如下:
本人为初学者,很多地方可能理解有误!
参考《雷达系统matlab仿真第三版》
《高速目标解模糊方法及机载雷达演示系统》.[R].2014.崔伟芳















 2118
2118











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









