







 文章介绍了雷达系统中用于抑制杂波的MTI滤波器,特别是其工作原理和在连续波及脉冲雷达中的应用。MTI滤波器通过在DC和多普勒频率的整数倍处产生深阻带来消除杂波,但可能导致特定速度(盲速)目标的丢失。文中还提到了单延迟线对消器的实现方法及其脉冲响应,并展示了使用MATLAB进行MTI滤波的时域仿真过程,以及对消后静态杂波的减少和可能出现的盲速问题。
文章介绍了雷达系统中用于抑制杂波的MTI滤波器,特别是其工作原理和在连续波及脉冲雷达中的应用。MTI滤波器通过在DC和多普勒频率的整数倍处产生深阻带来消除杂波,但可能导致特定速度(盲速)目标的丢失。文中还提到了单延迟线对消器的实现方法及其脉冲响应,并展示了使用MATLAB进行MTI滤波的时域仿真过程,以及对消后静态杂波的减少和可能出现的盲速问题。
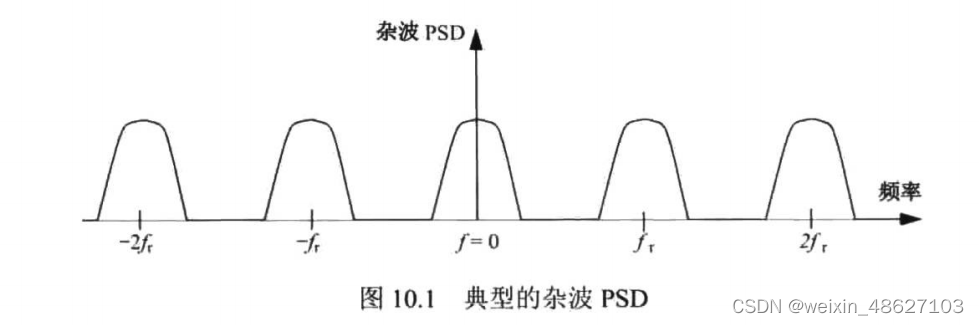
杂波频谱一般集中在和雷达
的整数倍周围,如图10.1(a)所示。在连续波雷达中,连续波雷达中,由于大多数杂波功率集中在零频带附近,通过忽略DC附近的接收机输出,
则可以避免杂波或将其抑制掉。脉冲雷达系统则可使用特殊的滤波器来将慢速运动(或固
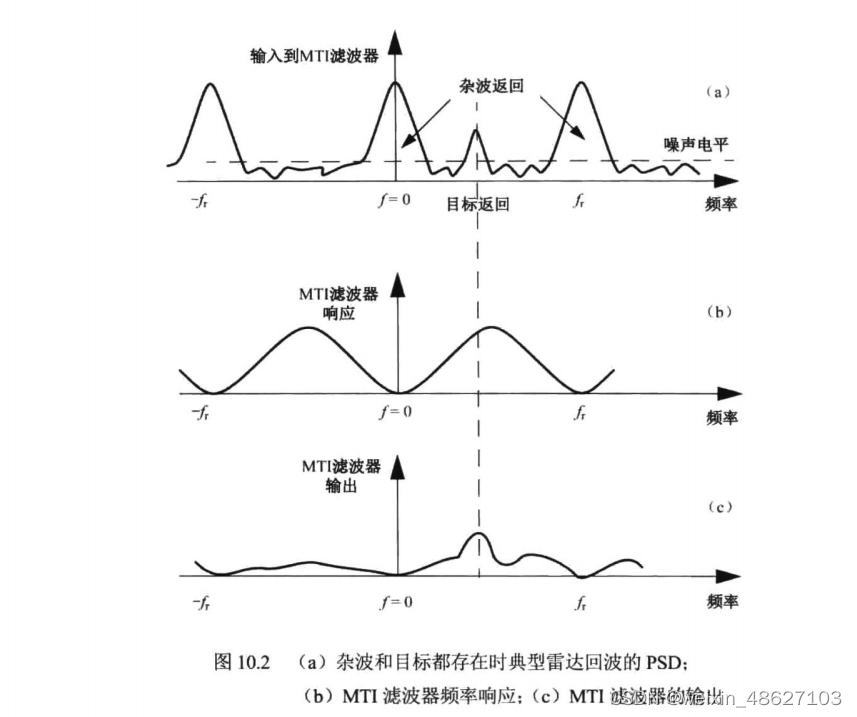
定)目标与快速移动目标区分开来。这类滤波器称为动目标显示器(MTI)。简单地说,MTI
滤波器的目的就是抑制掉杂波所生成的像目标似的一些回波,并让动目标回波没有损失地
(或损失很小地)通过滤波器。为了有效地抑制掉杂波回波,MTI滤波器在DC和PF整数
倍处必须有一个很深的阻带。图10.2(b)给出了一个典型的MTI滤波器响应图,图10.2(c)
则给出了以图10.2(a)中的PSD为输入时的输出图。
MTI滤波器可以用延迟线对消器来实现。在本章的后面我们将证明,此类MTI滤波器
的频率响应是周期性的,零值在PRF的整数倍上。因此,多普勒频率等于听的目标会出现
很大衰减。由于多普勒频率与目标速度成正比(),所以产生多普勒频率为无整数
倍的目标速度称为盲速。更准确地说,
单延迟线对消器可以用图10.3所示的方法来实现。对消器的脉冲响应表示为。输
出y(t)等于脉冲响应和输入
之间的卷积。由于单延迟线对消器在读出输出前需要有两
个不同的输入脉冲,因而经常称其为“双脉冲对消器”。
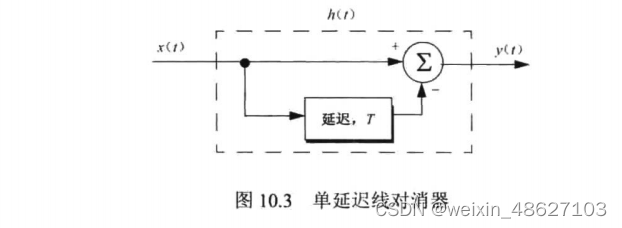
延迟T等于雷达的PRI。输出信号 y(t)为
对消器的时域脉冲响应由下式给出:
单延迟对消器响应为
单延迟线对消器的功率增益为:
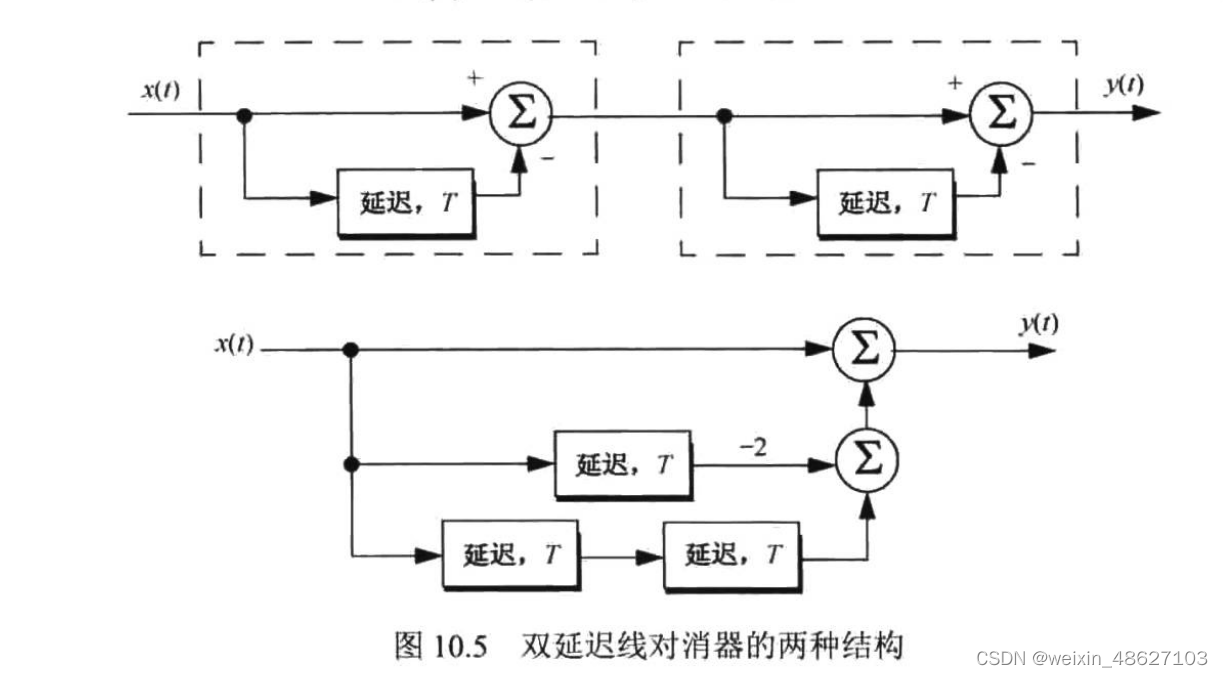
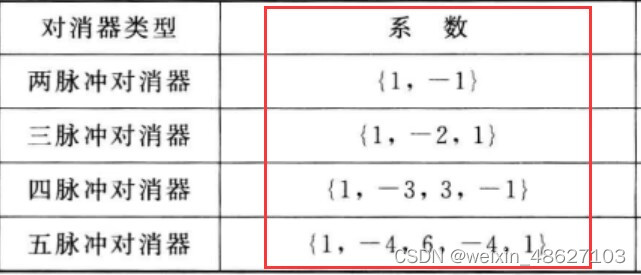
多延迟对消器可以由多个单延迟对消器级联而成,N脉冲对消的脉冲响应为、
式中,N为对消次数,注意一次对消需要两个脉冲,两次对消需要三个脉冲,以此类推,系数为二项式系数,计算方式如下
关于MTI的仿真,从时域出发很简单写,就是用脉冲乘以加权系数然后求和,但是值得注意的是从时域对消后会少脉冲,二阶对消会少一个脉冲,三阶对消会少两个脉冲依次类推。利用matlab的filter函数,很容易实现MTI时域对消。
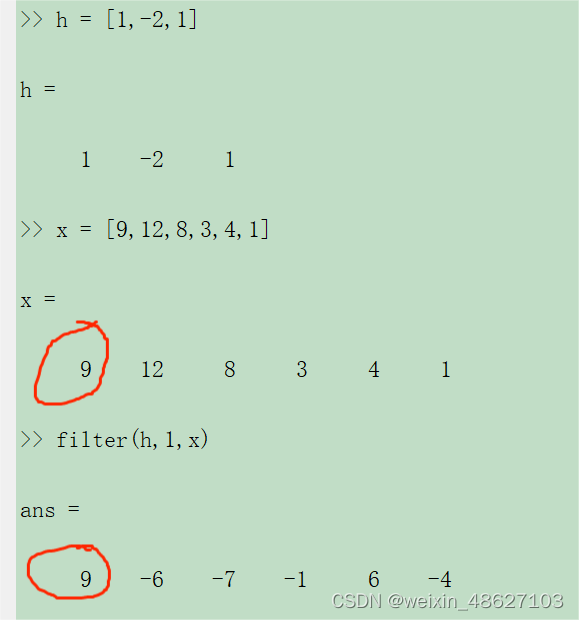
如上图,假设三阶对消,h为对消器系数,x为6个脉冲回波。通过函数filter函数可以看到,第一个脉冲是没有被滤波的,因此可以丢掉这个脉冲。下面是MTI时域实现代码
function [sum_PC_MTI] = MTI(sum_PC_Np,MTI_filter_n)
%功能:完成数据的MTI
%输入:
%sum_PC_Np:和通道信号
%MTI_filter_n:MTI脉冲对消个数
%输出:
%完成MTI之后的和通道信号
switch MTI_filter_n %判断对消个数
case 2
h = [1,-1];
case 3
h = [1,-2,1];
case 4
h = [1,-3,3,-1];
end
sum_PC_Np = filter(h,1,sum_PC_Np) ;%经过对消之后的矩阵
sum_PC_MTI = sum_PC_Np(MTI_filter_n:end,:);%丢掉前MTI_filter_n个脉冲
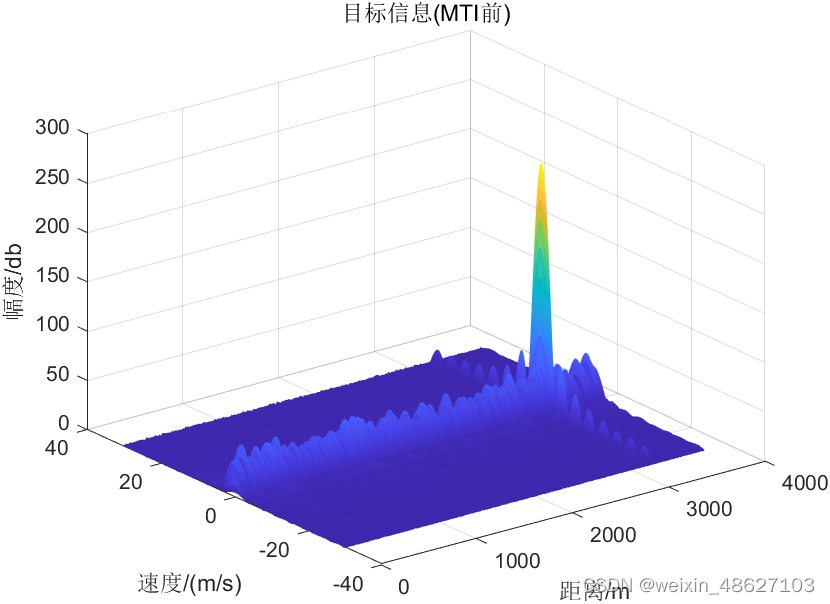
end下图是32个脉冲积累测速仿真MTI前后对比。
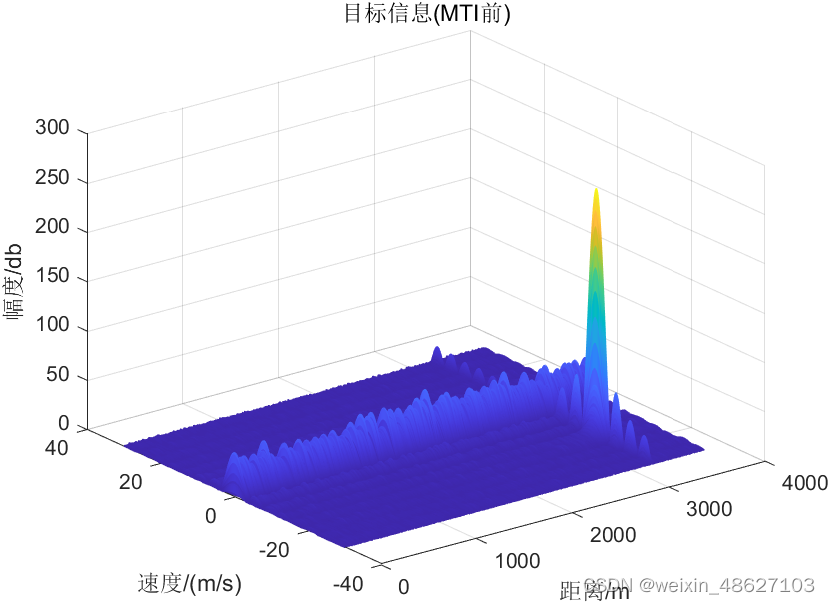
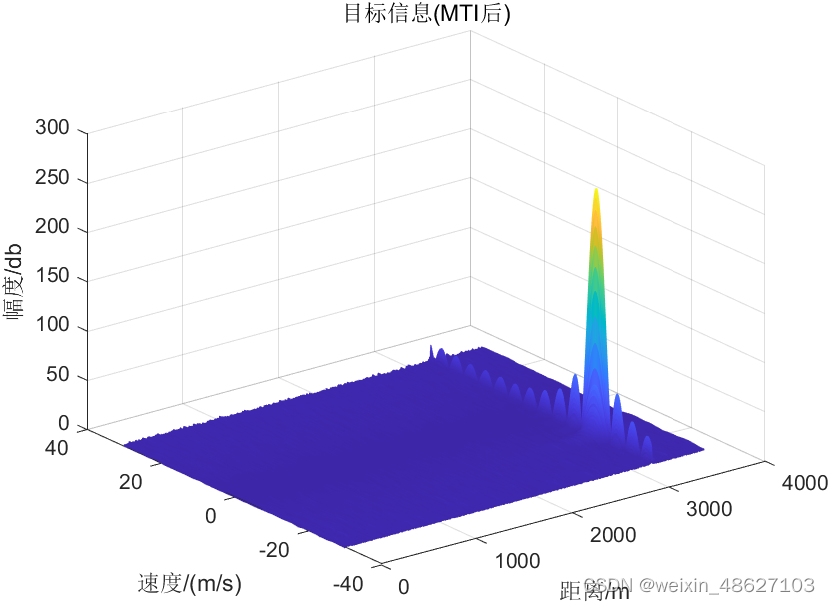
可以看到经过MTI后零频附近的静态杂波被对消掉了。但是当目标处于盲速或者速度很小接近于零时,也会被对消掉,这样就检测不出目标的速度了,如下图
目标速度处于盲速,多普勒频移在PRF的整数倍上,经过MTI滤波后被对消掉,无法测速。
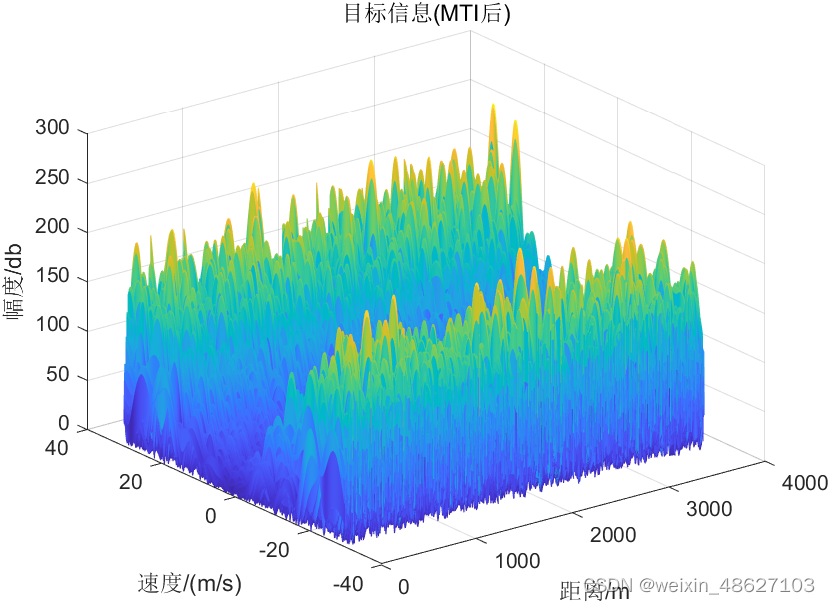
后续可以通过设置多重频,解模糊来避免这个问题。
本人为初学者,很多地方可能理解有误!
参考《雷达系统matlab仿真第三版》

















 3367
3367

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









