







拿到一款新的 Ouster 激光雷达后,有时往往因为不知道其 IPv4 地址而给产品调试和应用造成不便。
虽然 Ouster 也有提供 Linux 系统下的指令和 API 用于获取其激光雷达当前的 IPv4 地址:
avahi-browse -lr _roger._tcp以及设置新的 IPv4 地址:
echo \"[你想设置的静态IP]/24\" | http PUT http://[雷达当前IP地址]/api/v1/system/network/ipv4/override获取雷达 IP 地址的指令较短,尚且容易记忆,但是给激光雷达设置 IPv4 地址的指令就很长了,不便于记忆,而且指令中包含各种符号,输入稍有不慎,就会引起报错,而设置失败。
这里跟使用 Ouster 激光雷达的筒子们分享一个可视化的小软件。这个软件是一个封装为 .exe 格式的可执行文件,用于 64-bit Windows 操作系统,双击打开即可使用。
本人使用的 Windows 10 操作系统的笔记本电脑,亲测这款小软件,非常好用。
这款小软件有以下几个功能界面:
1. LiDAR IP 地址获取和设置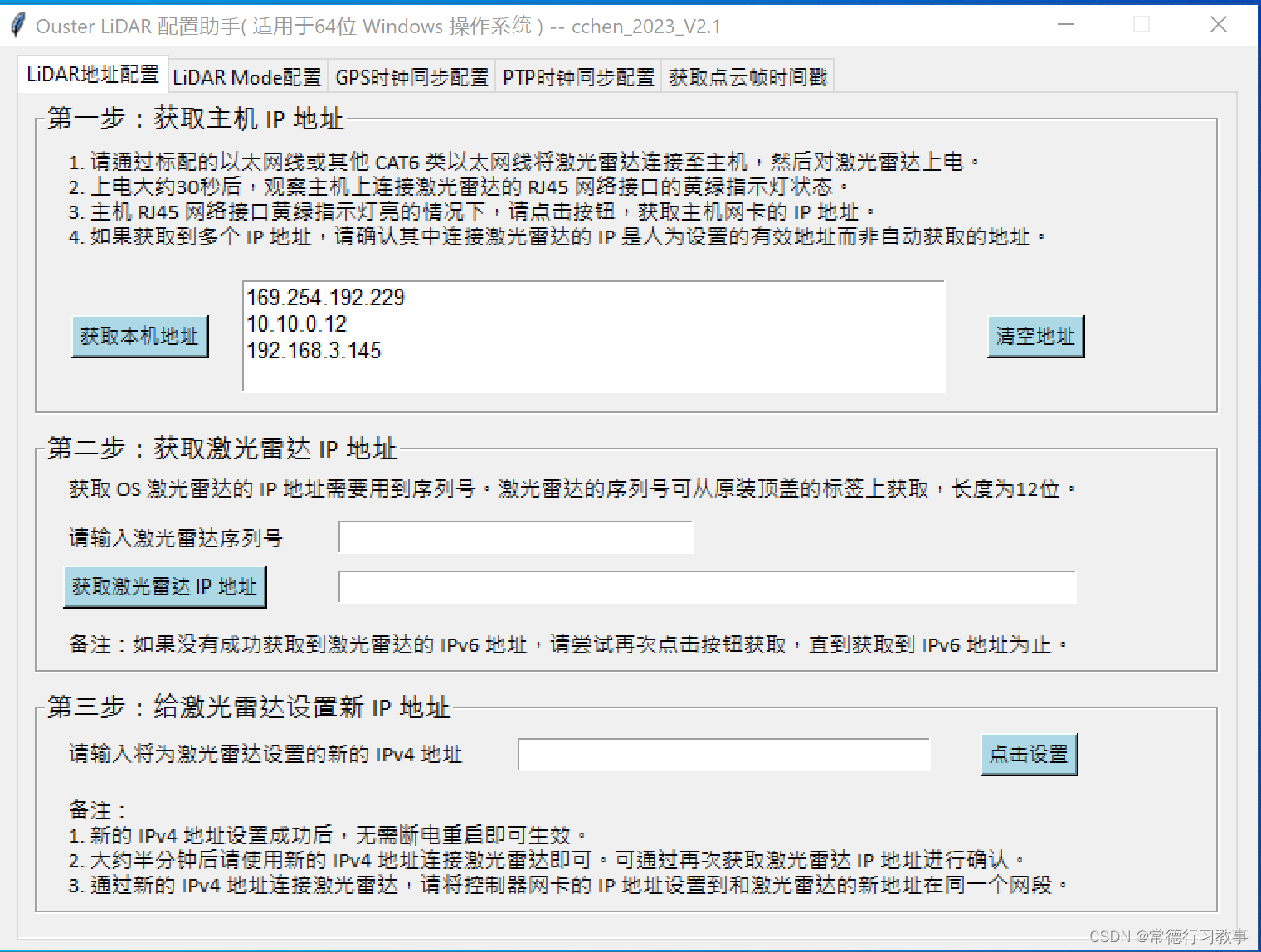
连接激光雷达后,在点击小软件上的按钮获取激光雷达的IP地址之前,首先请确保电脑连接激光的网卡已经设置了一个 Manual 的 IP 地址。电脑的网卡如果是 DHCP 自动获取的 IP 地址,并非不可用,但基于本人在不同电脑上的测试经历,貌似有
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 339
339











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









