







第一篇文章末尾的多线程问题解决了,可以实时获得深度与RGB彩色图片信息
1 <pthread.h> 头文件无法找到
下载地址:Mirror sites
POSIX Threads (pthreads) for Win32![]() https://sourceware.org/pthreads-win32/他家官网的地址都是空的网页,只能点mirror去镜像站下载
https://sourceware.org/pthreads-win32/他家官网的地址都是空的网页,只能点mirror去镜像站下载
配置过程:
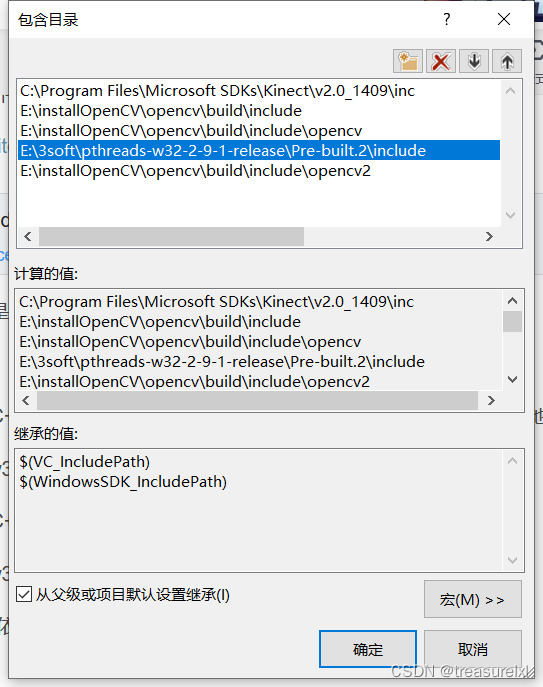
【配置属性】-【VC++目录】-【包含目录】-编辑-输入Pre-built.2\include的储存地址,我的如下:
E:\3soft\pthreads-w32-2-9-1-release\Pre-built.2\include
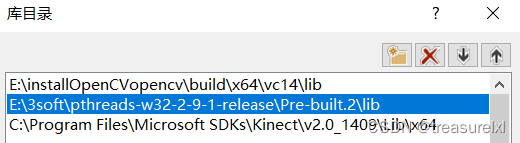
【配置属性】-【VC++目录】-【库目录】-编辑-输入lib的储存地址
E:\3soft\pthreads-w32-2-9-1-release\Pre-built.2\lib
【链接器】-【附加依赖项】-编辑-输入pthreadVC2.lib
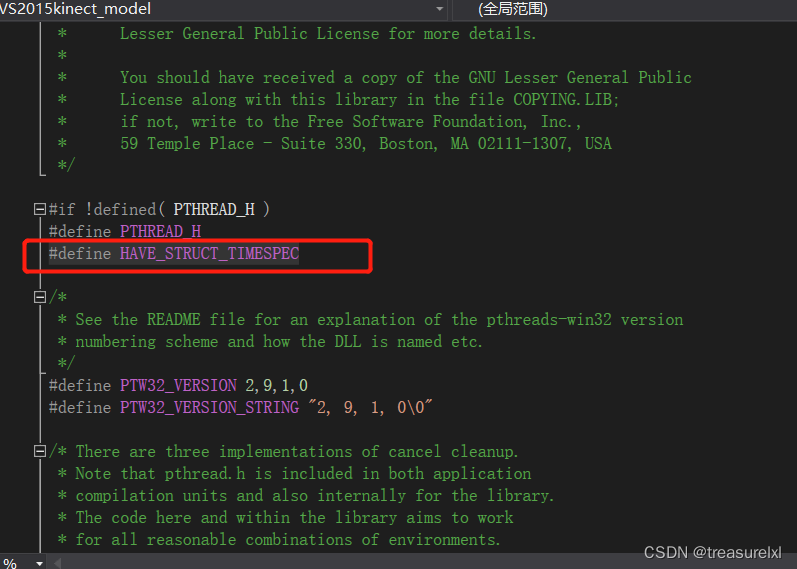
2 报错 C2011 “timespec”:“struct”类型重定义
原理我也看不懂,解决方法:
【外部依赖项】- 找到pthread.h - 在35行 输入下方文字
#define HAVE_STRUCT_TIMESPEC
3 报错 无法打开文件“opencv_world341d.lib” 无法打开文件“kinect20.lib”
解决方法:将附加依赖项改为绝对路径,如图:

// VS2015opencv_model.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <Kinect.h>
#include <opencv2/highgui.hpp>
#include <iostream>
#include <windows.h>
#include <thread>
#include <pthread.h>
#include <ctime>
#include <cstdio>
#include <time.h>
using namespace std;
using namespace cv;
char file_name[20];
IKinectSensor *m_pKinectSensor = nullptr;
//WaveFile audioFile;
BOOLEAN audio_initialized = false;
vector<BYTE> audioBuffer;
//void setAudio() { updateAudioFrame(); }
//void openAudio(string fname) { audioFile.Open(fname); }
//void closeAudio() { audioFile.Close(); }
//bool isOpenedAudio() { return audioFile.audioFile.is_open(); }
string now()
{
char s[1024];
time_t t = time(NULL);
struct tm lnow;
localtime_s(&lnow, &t);
sprintf_s(s, "%04d-%02d-%02d_%02d-%02d-%02d", lnow.tm_year + 1900, lnow.tm_mon + 1, lnow.tm_mday,
lnow.tm_hour, lnow.tm_min, lnow.tm_sec);
return string(s);
}
void initializeAudio()
{
IAudioSource *m_pAudioSource = nullptr;
auto ret1 = m_pKinectSensor->get_AudioSource(&m_pAudioSource);
/* if (ret1 != S_OK)
{
cout << "error : m_pKinectSensor->get_AudioSource(&m_pAudioSource);" << endl;
return;
}*/
IAudioBeamFrameReader *m_pAudioBeamFrameReader = nullptr;
auto ret2 = m_pAudioSource->OpenReader(&m_pAudioBeamFrameReader);
/*if (ret2 != S_OK)
{
cout << "error : m_pAudioSource->OpenReader(&m_pAudioBeamFrameReader);" << endl;
return;
}*/
UINT subFrameLength = 0;
auto ret100 = m_pAudioSource->get_SubFrameLengthInBytes(&subFrameLength);
if (ret100 != S_OK)
{
cout << "error : m_pAudioSource->get_SubFrameLengthInBytes(&subFrameLength);" << endl;
}
else
{
cout << subFrameLength << endl;
audioBuffer.resize(subFrameLength);
audio_initialized = true;
}
}
//void updateAudioFrame()
//{
// //if (!audio_initialized)
// // initializeAudio();
//
// IAudioBeamFrameReader *m_pAudioBeamFrameReader = nullptr;
// IAudioBeamFrameList *m_pAudioFrameBeamList = nullptr;
//
// UINT beamCount = 0;
// auto ret = m_pAudioBeamFrameReader->AcquireLatestBeamFrames(&m_pAudioFrameBeamList);
// if (ret != S_OK)
// {
// cout << "error : m_pAudioBeamFrameReader->AcquireLatestBeamFrames(&m_pAudioFrameBeamList);" << endl;
// }
// else
// {
// cout << "successful 155" << endl;
// }
// auto ret3 = m_pAudioFrameBeamList->get_BeamCount(&beamCount);
// if (ret3 != S_OK)
// {
// cout << "error : m_pAudioFrameBeamList->get_BeamCount(&beamCount);" << endl;
// }
// for (int i = 0; i < (int)beamCount; i++)
// {
// IAudioBeamFrame *m_pAudioBeamFrame;
// m_pAudioFrameBeamList->OpenAudioBeamFrame(i, &m_pAudioBeamFrame);
// UINT subFrameCount = 0;
// m_pAudioBeamFrame->get_SubFrameCount(&subFrameCount);
// for (int j = 0; j < (int)subFrameCount; j++)
// {
// IAudioBeamSubFrame *m_pAudioBeamSubFrame;
// m_pAudioBeamFrame->GetSubFrame(j, &m_pAudioBeamSubFrame);
// m_pAudioBeamSubFrame->CopyFrameDataToArray((UINT)audioBuffer.size(), &audioBuffer[0]);
// cout << (UINT)audioBuffer.size() << endl;
// audioFile.Write(&audioBuffer[0], (UINT)audioBuffer.size());
// }
// }
//}
void depthImage()
{
while (1)
{
//初始化深度流
IDepthFrameSource *m_pDepthSource = nullptr;
m_pKinectSensor->get_DepthFrameSource(&m_pDepthSource);
//取得深度尺寸
int depth_height = 0, depth_width = 0;
IFrameDescription *m_pDepthDescription = nullptr;
m_pDepthSource->get_FrameDescription(&m_pDepthDescription);
m_pDepthDescription->get_Height(&depth_height);
m_pDepthDescription->get_Width(&depth_width);
m_pDepthDescription->Release();
//打开数据阅读器
IDepthFrameReader *m_pDepthReader = nullptr;
m_pDepthSource->OpenReader(&m_pDepthReader);
//创建depth image buffer
IDepthFrame *m_pDepthFrame = nullptr;
UINT16 *depthArray = new UINT16[depth_height * depth_width];
Mat depthImg(depth_height, depth_width, CV_8UC1);
Mat depthImgSave(depth_height, depth_width, CV_16UC1);
string savefilename;
string saveReadfilename;
if (m_pDepthReader->AcquireLatestFrame(&m_pDepthFrame) == S_OK)
{
m_pDepthFrame->CopyFrameDataToArray(depth_height * depth_width, depthArray);
m_pDepthFrame->CopyFrameDataToArray(depth_width * depth_height, reinterpret_cast<UINT16 *>(depthImgSave.data)); //强制转换数据类型
for (int i = 0; i < depth_height; i++) //遍历图像
{
for (int j = 0; j < depth_width; j++)
{
depthImg.at<uchar>(i, j) = static_cast<uchar>(depthArray[i * depth_width + j]);
}
}
imshow("depthImg", depthImg);
string tmp;
tmp = now();
//sprintf_s(tmp, "%ddepthSave.png", a++); //也可以是其他类型的图片文件。比如.bmp
// char tmpRead[64];
//sprintf_s(tmpRead, "%ddepthRead.png", b++);
savefilename = tmp + "depth16Bit.png";
saveReadfilename = tmp + "depth8Bit.png";
imwrite(saveReadfilename, depthImg); //存储转换后的8位深度图
imwrite(savefilename, depthImgSave); //存储每一帧的深度图片
waitKey(1);
m_pDepthFrame->Release();
}
if (waitKey(30) == VK_ESCAPE)
{
m_pDepthReader->Release();
m_pDepthSource->Release();
break;
}
}
}
void colorImage()
{
while (1)
{ //初始化,彩色图像
IColorFrameSource *m_pColorSource = nullptr;
m_pKinectSensor->get_ColorFrameSource(&m_pColorSource);
//cout << &m_pColorSource << endl;
//获取彩色图像的尺寸
int color_height = 0, color_width = 0;
IFrameDescription *m_pColorDescription = nullptr;
m_pColorSource->get_FrameDescription(&m_pColorDescription);
m_pColorDescription->get_Height(&color_height);
m_pColorDescription->get_Width(&color_width);
m_pColorDescription->Release();
//打开数据阅读器
IColorFrameReader *m_pColorReader = nullptr;
m_pColorSource->OpenReader(&m_pColorReader);
//创建color image buffer
string savefilenamecolor;
IColorFrame *m_pColorFrame = nullptr;
Mat ColorImg(color_height, color_width, CV_8UC4);
if (m_pColorReader->AcquireLatestFrame(&m_pColorFrame) == S_OK)
{
m_pColorFrame->CopyConvertedFrameDataToArray(color_width * color_height * 4, (BYTE *)ColorImg.data, ColorImageFormat_Bgra);
imshow("ColorImg", ColorImg);
string tmp;
tmp = now();
//sprintf_s(tmpcolor, "%dColorSave.jpg", c++);
savefilenamecolor = tmp + "Color.jpg";
imwrite(savefilenamecolor, ColorImg);
waitKey(1);
m_pColorFrame->Release();
}
if (waitKey(30) == VK_ESCAPE)
{
m_pColorSource->Release();
m_pColorReader->Release();
break;
}
}
}
int main(void)
{
GetDefaultKinectSensor(&m_pKinectSensor);
m_pKinectSensor->Open();
//audioFile.Open(now() + ".wav");
thread thread1(depthImage);
thread thread2(colorImage);
//thread thread3(initializeAudio);
// thread thread4(updateAudioFrame);
thread1.join();
thread2.join();
//thread3.join();
// thread4.join();
return 0;
} 
4 为什么要用多线程(pthread)
写单线程的程序也可以实现获得RGB彩色图像和深度图像,但是程序的读写是从前往后的,所以无法获得同一时刻的图像;
而多线程是不同线程同时工作,所以得到的图像时同一个时刻的。















 5283
5283











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









