





原文:Fault diagnosis based on comprehensive geometric characteristic and probability neural network
链接:https://doi.org/10.1016/j.amc.2013.12.122
摘要
故障诊断是保证水轮发电机组安全运行的重要环节。轴心轨迹辨识是HGU故障诊断的一种有效方法。提出了一种基于综合几何特征和概率神经网络(CGC-PNN)的HGU轴轨识别方法。该方法从结构、区域和边界三个方面提出了宏观欧拉数(ME)、模糊凸凹特征(FCC)和边界层特征(BL)来表示轴轨道。因此,由ME、FCC和BL组成的特征向量充分地集成了最有效、最全面的图像信息。最后,将该方法应用于800个故障样本,实验结果表明,该方法能有效地提高故障诊断的准确性。
1介绍
随着科学技术的不断发展,HGU的结构越来越复杂,失效的风险也逐渐增大。故障不仅影响机器的正常运行,还可能造成生产中断、经济损失,甚至人员伤亡等后果[1]。因此,对HGU故障诊断的研究是非常必要的,并不断改进[1]。HGU是一种典型的旋转机械,其最常见和最主要的故障是轴系振动故障[2],如错位[3]、不平衡[4]和油膜振荡[5]。因此,信号处理是HGU故障诊断最关键的方法。以往的故障诊断研究一般基于平稳信号分析[6-8],但这并不适用于HGU的非平稳信号。因此,这些不符合会严重影响诊断结果的可靠性和准确性,甚至导致误诊。
由轴振动信号合成的轴轨道包含了丰富的轴健康状态信息[2,9],其形状能准确反映出HGU[2,9]的运行状态和故障状态。因此,轴心轨迹辨识是近年来HGU故障诊断的一种有效方法。在一些研究中,轴轨识别被视为二维图像的模式识别[2,9,10],只有正确识别图像,才能准确识别故障[13]。
特征提取是轴心轨迹识别的关键步骤,特征提取的可分性直接决定了故障诊断的结果[2,9]。一些研究小组已经提出了基于区域的图像特征提取方法,如快速傅立叶变换(FFT)[14,15]、小波变换(WT)[16,17]、不变矩[18–20]和脉冲耦合神经网络(PCNN)[2,21–23],这些方法都是从内部特征来表示形状的。其他研究人员也提出了基于轮廓的方法来表示形状的外部特征,例如傅立叶描述子(FD)[10,24]、Walsh描述子(WD)[11,12]和链码[9,25]。这些方法都能准确地掌握不同形状之间的差异,在轴心轨迹识别中取得了满意的效果。但是,仍然存在两个严重制约形状表示精度的关键问题:(1)只有一个方面的特征总是漏掉形状的一些重要信息[9];(2)特征和形状之间的对应关系不是绝对清楚的。
因此,本文试图克服前人研究的不足。首先,提出了宏观欧拉数(ME)、模糊凸凹特征(FCC)和边界层特征(BL),从拓扑结构、区域和边界三个方面来充分表达轴轨道。其次,针对ME、FCC和BL,提出了一种既能准确提取有效信息又能有效克服图像不规则和噪声干扰影响的计算方法。最后,利用特征向量将最有效的图像信息进行了充分的集成,并给出了它们之间的对应关系特征向量和HGU轴轨道形状非常清晰。因此,特征向量在轴心轨迹识别中具有很好的应用前景。
故障识别是另一个关键步骤。在过去的几十年里,粗糙集[12]、支持向量机[26]和人工神经网络[27]被广泛应用和发展,以识别机械故障。概率神经网络(PNN)[28]被证明非常适合于具有简单特征向量的辨识问题[2]。根据特征向量的简单性,引入PNN作为分类器,实现了轴心轨迹的自动识别。
本文旨在建立一种基于综合几何特征和概率神经网络(CGC-PNN)的HGU故障诊断方法,其结构如下:第二节给出了HGU轴轨道、欧拉数和PNN的基本理论。第三节介绍了ME、FCC和BL的定义和计算方法。第四部分讨论了特征向量和分类器。第五节介绍了故障识别实验。最后,第六部分总结了本研究的结论。
2、HGU轴轨道、Euler数和PNN理论
2.1、HGU轴轨道描述
HGU轴轨道反映了轴中心在一个垂直于轴的平面上的运动曲线。轴心轨迹由安装在每个导轴承段两个正交位置的两个非接触式位移传感器测得的径向振动信号合成[2]。
轴心轨迹反映了旋转机械的各种故障信息,因此轴心轨迹形状对轴系故障诊断非常必要[2,9]。在此基础上,将故障诊断问题转化为形状识别问题[2,9]。以往的研究[11]证明了HGU轴心轨迹形状与其故障状态有直接的对应关系,见表1。因此,轴心轨迹识别作为轴系故障诊断的一种有效方法已受到重视。
2.2、数字图像的欧拉数
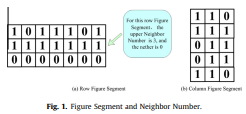
2.2.1、图段和相邻数
对于二维图像,图段[29]是一行或一列中连续的1像素的字符串,最接近其开始和结束的部分是图像边界或0像素。图1示出了(a)中的四个行图形段和(b)中的四个列图形段。
对于一行图形段,相邻数字[29]是相邻行中与其连接的图形段的数目。上邻行产生的邻数是上邻数,下邻行产生的邻数是下邻数[29]。在图1(a)中,行图形段的上邻数为3,下邻数为0。

2.2.2条。数字图像的欧拉数及其计算方法
对于数字图像,欧拉数可以描述图像的拓扑结构性质,二维图像的欧拉数定义如下[29]:

其中E是欧拉数;C和H是图像中的连接单元计数和孔计数。
最有效的欧拉数计算方法之一定义如下[29]:

其中E是Euler数;M是图像的行数;K是第M行中的图段数;Vmk是第M行第K个图段的上邻数。
2.3、概率神经网络
PNN是Specht于1988年提出的基于Parzen概率密度函数和贝叶斯分类规则的前馈四层神经网络[28]。实践证明,PNN易于训练,可用于实时应用[2,9]。另外,如果训练数据足够,PNN几乎可以获得最佳的分类效果[28]。本文简要介绍了PNN理论,更详细的信息可以在Quan等人(2008)、Specht(1990)、Wu等人(2008)、Wu和Chiang(2009)中找到。
PNN的四层包括输入层、模式层、求和层和输出层,如图2所示。输入层为所有图案层单元提供相同的输入值。每个模式层单元通过输入与权重向量相乘得到输出,PNN采用指数激活函数作为非线性运算得到输出。然后,求和层对模式层的输入进行求和,得到估计的概率密度,如下[2]:

其中m是训练模式的总数;X(x1,x2,x3,…,xp)是输入模式向量;XAi是类别A的第i个训练模式;P是度量空间的维数;σ是平滑因子(标准差)。输出层是决策层,它做出最终的网络决策。概率密度最大的一个为整个系统的输出,其值为1,其他值为0。

3、基于综合几何特征的轴轨迹表示
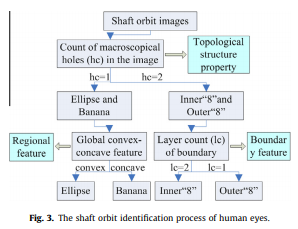
显然,所有的轴心轨迹自动识别方法的可靠性和准确性都远远低于人眼。图3为人眼轴轨识别过程。不难看出,有三个关键原因保证了人眼的识别效果:(1)只提取了能够反映不同轴轨道之间最明显差异的最有效信息,而忽略了图像信息中的所有无用细节;(2)综合几何特征其中包括结构特征、区域特征和边界特征被人眼充分整合,从而准确地表示形状;(3)所获取的特征都能在一定程度上决定形状,特征与形状之间的对应关系是绝对清晰的。为了提高轴心轨迹表示的精度,提出用ME、FCC和BL三种方法来模拟人眼,从结构、区域和边界三个方面来描述图像的综合几何特征。实现了基于综合几何特征的形状表示。
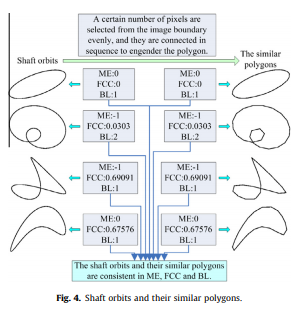
从轴轨道上提取ME、FCC和BL不是一件容易的事情,形状不规则和边界不光滑是最大的障碍。近似轴轨道的正多边形可以克服这些问题[30,31]。此外,在ME、FCC和BL中,只要它们足够相似,多边形和轴轨道将保持一致或足够接近,如图4所示。因此,本文用相似多边形代替了轴轨道的ME、FCC和BL。mefcc和BL都是宏观特征,不需要提取图像的细节信息。因此,这里要求的相似多边形不一定是最相似的多边形[30]。本文通过以下步骤获得相似多边形:(1)按一定比例(CP)从图像边界均匀地选择一定数量的像素;(2)将采集到的像素按顺序连接起来形成多边形。
3.1、ME的定义和计算
3.1.1、ME的定义
Euler数可以描述图像的拓扑结构性质,反映图像中连通单元和孔洞的数量。在宏观上,椭圆、内“8”、外“8”和Banana的欧拉数分别为0、1、1和0,它们能简单、清晰地反映它们的宏观结构特征。然而,实际的HGU轴轨道是不规则形状的,常常夹杂着一些有色噪声。这些会产生一些微小的孔,这些孔不会影响宏观形状,但会显著影响精确的欧拉数。此外,小孔的随机性导致了传统欧拉数的随机性和不稳定性。显然,传统的欧拉数不能很好地满足轴轨迹的精确识别。
本文针对这一问题提出了ME,其定义如下:

其中E’是ME;E是传统的Euler数,HC是微型孔数。ME是基于传统的Euler数定义的,但它对小孔不敏感,能准确描述图像的宏观结构特征。从而实现了对结构特征的宏观把握。最后,由于小孔计数法不是绝对准确的,所以有必要对E’作如下修正。
其中E’是ME,E’'是修正后的ME。
3.1.2、我的计算
计算ME的关键是消除小孔的影响。为此,本文提出了一种将小孔填充与小孔计数相结合的方法。ME的计算流程如图5所示。
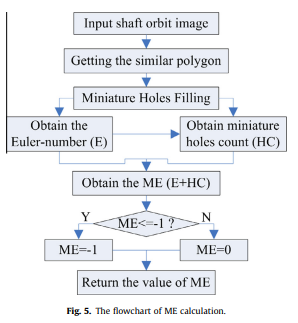
第一步:得到相似的多边形。
第二步:填充小洞。在多边形的任何一行中,如果两个相邻图形段之间的0像素数小于填充阈值(FT),则将这些0像素的值更改为1。
步骤3:用Eq.(2)计算传统的欧拉数(E)。同时记录了可能的孔起始(HB)和孔结束(HE)。这里,HB是下邻数大于1的图段,他是上邻数大于1的图段,如图6(a)所示。
第四步:数一数小洞。通过匹配HB和HE计算HC,如图6(b)所示。
第5步:ME由Eqs计算。(4) 和(5)。

3.2、FCC的定义与计算
3.2.1、FCC的定义
凸凹特征可以直观地描述图像的区域特征,在图像识别中也得到了广泛的应用[32]。然而,对于HGU轴轨道识别,仍然存在三个问题:(1)由于形状不规则,宏观凹凸特征容易被局部凹面所欺骗;(2)噪声干扰会导致并增强第一个问题;(3)凸凹特征的提取需要大量的数据不合时宜的计算。综上所述,传统的凸-凹特征抗干扰能力较差。
为了克服这些问题,提出用FCC来描述图像的宏观凹凸特征,其定义如下:
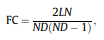
其中FC是FCC,ND是从图像边界均匀选择的像素计数。任何两个ND像素都可以通过一个特定的线段连接起来。其中一些线段穿过外部区域,LN是它们的数目。
如果ND值合适,FCC可以忽略局部凹面,描述宏观凹凸性。这种改进大大提高了其抗干扰能力,满足了轴心轨迹识别的要求。此外,计算量大大减少,速度大大提高。
然而,外部“8”和Banana的FCC值分布较广,且较小的FCC值更接近内部“8”和椭圆的FCC值。这使得特征与形状之间的对应关系变得复杂和模糊,尤其是椭圆和Banana。为了克服这一问题,对催化裂化装置作了如下改进:
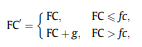
其中FC’是FCC的最终值;FC是原始值;fc是阈值,本文中,它是椭圆平均最大FC和banana平均最小值;g是人为提供的间隙。
3.2.2、FCC的计算
FCC的计算非常简单,具体步骤如下:
第一步:得到相似的多边形。
第二步:填充多边形。外部、边界和内部像素的值为0、1和2。
第三步:从图像边界均匀选取ND像素。
第四步:得到LN,如图7所示。
第五步:FCC由Eqs计算。(6) 和(7)。

3.3、BL的定义与计算
3.3.1、BL的定义
边界层反映了一些非常重要的图像信息。本文提出用BL来描述这一特征,其定义如下:
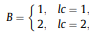
其中B是BL的值;lc是边界的层数。
BL反映了一种非常清晰有效的边界特征,可以在一定程度上决定轴轨道形状。因此,它在轴心轨迹识别中起着重要的作用。
3.3.2、BL的计算
本文提出的BL计算方法包括三个关键部分:填充、扫描、计算。流程图如图8所示,具体计算步骤如下:
第一步:得到相似的多边形。
第二步:填充多边形。外部、边界和内部像素的值为0、1和2。
第三步:扫描图像得到STR,如图9所示。对于多边形的每一行,按顺序记录非零像素,并且具有相同值的连续像素只记录一次。最后,将这些像素按顺序连接成一个字符串。从多边形得到的所有字符串都记录为公式(9)。
第4步:获得NE。NE是STR中等于“1212121”的字符串的计数。
第五步:BL按式(10)计算。
其中n是STR的大小;S(k)是从图像的k行得到的字符串;B是BL的值;NE是在步骤4中获得的相同值;bt是阈值。


4特征向量与分类器
4.1、特征向量
在轴心轨迹识别中,选择一个有效的特征向量来描述轴心轨迹是非常重要的。本文的特征向量由ME、FCC和BL组成,从它们的定义可以看出它们只与宏观图像形状有关,对旋转、缩放和平移不敏感。因此,特征向量也具有不变性。此外,椭圆和Banana具有相同的ME和BL,但它们在FCC中有明显不同。内部的“8”和外部的“8”具有相同的“我”和“令人困惑的FCC”,但是,它们的BL是完全不同的。因此,特征向量保留了结构、区域、边界等最重要的特征和差异,保证了特征向量的区分能力。
不变性和区分能力是特征向量的两个最重要的属性,它们可以通过定义如下的欧几里德距离来度量[33]:
其中Rn0和Rn1是两个特征向量,MSE是它们之间的欧几里德距离。
4.2、分类器
分类器是直接决定故障诊断效率和准确性的重要因素之一,因此根据具体的诊断对象选择合适的分类器具有十分重要的意义。该方法的特征向量非常简单,特征向量与轴轨道形状的对应关系也十分清晰。此外,还证明了PNN非常适用于这类辨识问题[1,9]。因此,采用PNN作为分类器。
5故障轴心轨迹识别实验
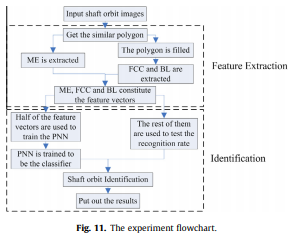
本节介绍了基于上述理论的轴心轨迹辨识实验。实验中使用的轴轨道样本包括椭圆、外部“8”、内部“8”和Banana。每个班级有200组原始数据。所有这些样本都是在Matlab环境下通过仿真得到的,部分样本图像如图10所示。相关参数值见表2。实验流程如图11所示。
实验包括以下三个部分:(1)验证了ME、FCC和BL在轴心轨迹识别中的有效性;(2)验证了特征向量的不变性和区分能力;(3)验证了CGC-PNN的识别效率。


5.1、ME、FCC和BL的有效性验证
用本文第三部分介绍的方法计算了80个样品的ME、FCC和BL。ME和BL值记录在表3中,FCC值记录在表4中。
在表3中,数据反映:(1)椭圆、外部“8”、内部“8”和Banana的ME为0、1、1、0;(2)内“8”边界的层数为2,其他边界的层数为1。在表4中,数据表明:椭圆轴轨道总体上是凸的,有些部分可能是微凹的;内“8”轴轨道的某些部分大部分是凸的或微凹的,少数是明显凹的;外部的“8”轴轨道和Banana轴轨道是明显凹的。这三个特征准确地描述了结构、区域和边界的最有效的形状信息。显然,ME、FCC和BL的结合自动实现了轴轨道的综合表示。因此,由ME、FCC和BL组成的特征向量可以为轴心轨迹识别提供有效的依据。

5.2、特征向量的不变性和区分能力
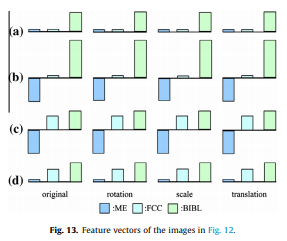
表5记录了图12中所示原始图像之间的欧几里德距离及其变换,表6提供了四个不同轴轨道中任意两个之间的距离。它们的特征向量如图13所示。
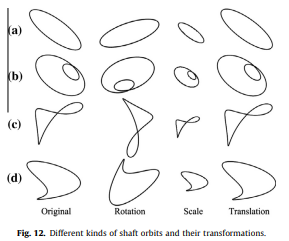


在表5中,欧几里德距离为0或可忽略不计,在图13中,一幅图像的特征向量及其变换几乎相同。有效地证明了旋转和矢量变换是不敏感的。从表6中不难看出,任意两个不同图像之间的欧几里德距离是相当明显的,图13还表明不同图像的特征向量之间存在明显的差异。这意味着特征向量保留了不同轴心轨迹之间最有效的差异,因此具有很好的区分能力。
5.3、轴心轨迹辨识实验
首先,利用本文第三部分介绍的方法提取800个样本的特征向量。其次,随机选取一半特征向量,同步输入PNN,训练PNN成为分类器。最后,将剩下的特征向量放入分类器中,由分类器输出分类结果。上述过程重复10次,并记录所有结果。
鉴定实验结果见表7,椭圆、内“8”、外“8”和Banana的识别率分别为100%、99.23%、100%和99.59%。表8列出了与其他方法[1,9,11]的比较。这些实验是在相同的条件下用相同的数据进行的。
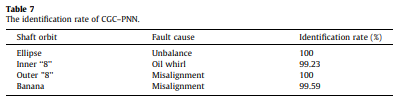

CGC-PNN的最低识别率为99.23%,明显优于其他四种方法的平均识别率,且区分一个轴轨道所需的平均时间小于100ms。因此,根据实验结果,实践证明,CGC-PNN在HGU故障诊断中是准确有效的。与以往的方法相比,其在时间要求上的优越性不是很明显。然而,CGC-PNN在平均识别率方面的优势是相当显著的。此外,CGC-PNN在复杂度上也显示出优越性。
6、结论
提出并讨论了一种基于综合几何特征的HGU故障诊断方法。在该方法中,提出了用ME、FCC和BL三种不同的方法来表示轴轨道。它们不仅能反映最有效的图像结构、区域和边界信息,而且能在一定程度上决定形状。因此,特征向量实现了形状的全面准确表达,特征向量与形状之间的对应关系十分清晰。最后,采用PNN作为分类器,保证了本文提出的故障诊断方法的有效性。
通过仿真实验,得到了四种轴心轨迹的识别率,并与以往三种故障诊断算法进行了比较。实验结果表明,CGC-PNN可以快速、自动地完成诊断过程,并与以往的方法进行了比较,证明了其优越性。
致谢
感谢匿名评论员的有益意见和建议,以改进本研究的陈述。这项工作得到了国家自然科学基金(No.51239004)、国家自然科学基金(No.51079057)和中国高校博士学科研究基金(No.20100142110012)的资助















 188
188











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









