





原文:An approach to fault diagnosis of reciprocating compressor valves using Teager–Kaiser energy operator and deep belief networks
链接:https://doi.org/10.1016/j.eswa.2013.12.026
摘要
提出了一种实现往复式压缩机气门振动、压力和电流信号故障诊断的方法。由于压缩机结构和运动的复杂性,采集到的振动信号通常包含瞬态冲击和噪声。这就造成了有用信息的破坏,传统方法难以准确诊断故障。为了揭示该信号中包含的故障模式,提出了Teager-Kaiser能量运算(TKEO)来估计振幅包络。在压力和电流的情况下,采用基于小波变换的去噪方法去除随机噪声。随后,从所有信号中提取统计度量来表示阀门状态的特征。为了对压缩机阀门故障进行分类,提出了一种新的深层生成模型学习结构,称为深层信念网络(deep-belience networks,DBNs)。DBN采用多层受限Boltzmann机(RBMs)的分层结构,通过贪婪的逐层学习算法进行学习。在模式识别的研究领域,DBN已经被证明是非常有效的,并且对二进制值具有很高的性能。然而,为了将动态贝叶斯网络应用于大多数信号为实值信号的故障诊断,本研究考虑了具有伯努利隐单元和高斯可见单元的RBM。以两级往复式空气压缩机为例,验证了该方法的有效性。为了验证DBN在故障分类中的优越性,将其性能与相关向量机和反向传播神经网络进行了比较。结果表明,该方法具有较高的可靠性,适用于工业往复机械的故障诊断。
1介绍
往复式压缩机(RC)是工业应用中应用最广泛的一种压缩机,由于具有较高的压比,是输气管道、石油化工厂、炼油厂等行业的关键设备。与离心式压缩机等其他类型相比,全世界大约安装了三倍于马力的RC,其维护成本高于这三倍半(Griffith&Flanagan,2001)。由于钢筋混凝土结构的复杂性和多个构件在高温、高压等关键条件下的工作,钢筋混凝土的失效是可能发生的,不仅会导致生产过程的停工,还会造成人员伤亡。在RC中,吸入阀和排出阀是经常发生故障的部件。根据Leonard的研究(Leonard,1996),需要关闭压缩机的情况中有36%和总维修成本的50%与阀门故障有关。这促使人们考虑RC阀门的准确可靠的故障诊断方法,以实现安全生产和最小化维护成本。
近年来,文献中提出了基于振动和声学信号的RC及其阀门故障诊断方法。然而,RC是一种机器,它包含了大量在旋转和线性方向上运动的部件,这些部件会导致振动信号的非平稳和噪声。因此,传统的快速傅立叶变换(FFT)等振动分析技术已成功地应用于旋转机械的振动信号分析中。处理非平稳或瞬态信号的替代方法是将信号分解为子带,在子带中可以获得平稳和线性特征,并且容易提取故障模式。小波变换(WT)和经验模态分解(EMD)是钢筋混凝土振动信号处理的突出代表。例如,Yang,Hwang,Kim,and Tan(2005)采用离散小波变换,以Daubeches-10作为基本函数,将振动和声学信号分解为不同的子频带。然后,从前4层提取统计测度,利用人工神经网络(ANNs)和支持向量机(SVMs)作为分类器,对冰箱用小RC进行故障识别。Lin(2010)分别采用集成EMD将振动信号分解为不同频率的固有模态函数(IMF)和Hilbert谱来提取故障特征。然而,小波变换普遍存在着一些缺点,如难以选择合适的基本函数、没有针对不同任务的选择标准或一般规则、多分辨率恒定等。与EMD相似,第一个IMF不是一个单一的特征分量,由于使用了广泛的频率范围,因此很难提取故障模式,EMD的计算成本很高(Bin,Gao,Li,&Dhillon,2012)。一些研究者提出了从RC振动中提取故障特征的各种方法来进行故障诊断。例如,Cui,Zhang,Kang,and Lan(2009)利用奇异谱熵、谱熵、小波包熵等不同的信息熵特征作为支持向量机的输入来诊断阀门故障。秦江峰和何(2012)也应用支持向量机识别压缩机阀门的故障类型,其中支持向量机的输入是参数化波形、衰减特征和从波形匹配方法中提取的阻尼固有频率。利用振动和/或声信号进行故障模式识别的其他研究见参考文献。Elhaj等人(2008)、Pichler、Schrems、Buchegger、Huschenbett和Pichler(2011)、Verma、Kadambari、Abhijit、Tanu和Salour(2011)以及Youfu、Shulin、Na和Ruihong(2013)。
由于压力信号能准确地反映阀门的工作状态,因此在阀门故障诊断中,另一个备受关注的信号是压力信号。这个信号的常见用法是用示功图来描述一个工作循环中的能量,在示功图中使用压力和体积,即所谓的P-V图。一旦阀门发生故障,压力和P–V图的形状会相应地改变。有几种方法实现了这一特征来识别压缩机阀门的故障。Feng,Jiang,He,and Ma(2011)主要基于P–V图的2D数字图像进行阀门故障诊断,如排放阀堵塞、吸入阀堵塞、排放阀泄漏等。利用curvelet变换提取该图的代表性特征,用主成分分析降低特征集的高维性,用SVM对故障进行分类。在Wang、Song、Zhang和Li(2010)的研究中,还进行了支持向量机和从P–V图图像中提取的不变矩。另一项研究调查了该研究区域P-V图的使用情况,见Wang、Zhuang和Yu(2010)。然而,使用P-V图将导致二维信号的处理,这比一维信号更为复杂和昂贵。另一个信号是驱动RC的感应电机的电流,也集中在Gu、Shao、Hu、Naid和Ball(2011)和Zhen、Wang、Gu和Ball(2013)中,其中使用了改进的双谱和动态时间扭曲来分析,以便分别识别RC的故障。然而,当需要足够的知识来准确地对故障发生及其严重程度进行分类时,分析性故障诊断方法似乎是一个挑战。此外,它们不适用于决策支持系统。
本文将上述三种信号同时引入到Teager-Kaiser能量算子(TKEO)和深度信念网络(DBNs)的RC阀故障诊断中。一般来说,非线性TKEO(Kaiser,1990,1993)测量由单一时变频率组成的信号的瞬时能量变化。与其他方法相比,TKEO的一个主要优点是计算出的能量来自信号的瞬时振幅和瞬时频率(Solnik、Rider、Steinweg、DeVita和Hortobágyi,2010)。TKEO具有较高的时间分辨率和对信号瞬时变化的良好适应性,可以增强瞬态特征,适合于探测撞击信号(Liu,Wang,&Lu,2013)。在故障诊断领域,TKEO及其扩展已被应用于轴承(Li,Fu,&Zhang,2009;Liang&Bozchaloi,2010;Liu et al.,2013;Rodríguez,Alonso,Ferrer,&Travieso,2013)和齿轮(Li,Zheng,&Tang,2010)的故障诊断。本文利用TKEO估计瞬态振动信号的幅度包络(AM信号),然后从中提取AM信号的统计特征。对于压力和电流信号,在提取统计特征之前,采用基于小波变换的去噪方法进行去噪。基于这些特征,应用Hinton、Osindero和Teh(2006)提出的DBN和一种新的机器学习方法对RC阀故障进行分类。DBN是由多层受限玻耳兹曼机(RBM)组成的概率生成模型。RBMs的贪心逐层学习算法可以有效地对模型进行无监督的预训练,然后利用随机梯度下降和标记数据对模型参数进行微调。学习算法和微调过程使DBN获得了较高的性能,并已成功地应用于语音识别(Mohamed,Dahl,&Hinton,2009,2012)、手写字符识别(Hinton,2002;Hinton et al.,2006)、目标识别(Nair&Hinton,2009),DBN还解决了飞机发动机和电力变压器的故障诊断问题(Tamilselvan&Wang,2013)。原来,DBN中RBM的可见单元和隐藏单元只能取二进制值,而打开隐藏单元的概率是用logistic函数计算的。然而,这种基于成果的管理对于建模实值数据来说非常不方便,而且表示性很差(Hinton,2010)。为了解决这一问题,本文考虑了一种高斯-伯努利RBM模型,其中隐单元是二进制的,而可见单元是高斯噪声和单位方差线性的。
2方法
2.1. Teager–凯撒能源运营商
Teager-Kaiser能量算符(TKEO)ψ[·]定义为连续时间信号x(t),如下所示(Cexus&Boudraa,2004;Maragos,Kaiser&Quatieri,1993a):
其中x·(t)和x··(t)分别是x(t)的第一次和第二次导数。在离散情况下,时间导数可以用时间差来近似。离散时间对应物变为(Cexus和Boudraa,2004;Maragos,Kaiser和Quatieri,1993b):

TKEO的一个重要方面是它几乎是瞬时的,因为每个时刻只需要三个样本来计算能量。此外,这种高时间革命和简单的操作提供了捕捉能量波动的能力,以及在执行中有效地执行。Maragos等人(1993b)提出了离散能量分离算法(discrete energy separation algorithms,DESAs),用于估计离散时间信号的振幅包络a(n)和瞬时频率f(n)。有三种主要类型涉及DESA-1、DESA-1a和DESA-2,其中前两种使用两个样本差异,而后一种使用三个样本对称差异。这些算法的a(n)和f(n)如下所示:

在许多情况下,DESA-1和DESA-2都优于DESA-1a。此外,DESA-1略优于DESA-2(Maragos等人,1993b)。因此,本研究采用DESA-1。
2.2. 深层信念网络
2.2.1. 受限Boltzmann机器的结构
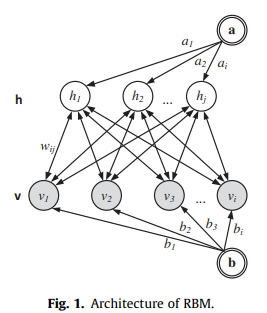
受限玻耳兹曼机(RBM)是一种特殊的马尔可夫随机场,由一层二元随机隐单元h∈{0,1}H和一层二元随机可见单元v∈{0,1}V构成。RBM可以表示为一个二部无向图模型,其中所有可见单元都与所有隐单元相连,但不存在可见或隐藏的联系。可见层和隐藏层之间的权重是无向的,用w表示。可见单元和隐藏单元的偏差分别用向量b和a表示。RBM的体系结构如图1所示。
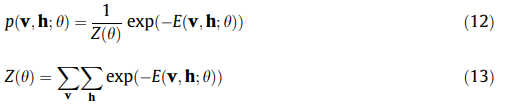
在二元RBM中,连接的权重和各单元的偏差通过能量函数定义了可视单元和隐藏单元联合状态的概率分布。给出了该能量(Hinton,2010;Mohamed et al.,2012;Salakhutdinov,2009):

其中vi和hj是可见单元i和隐藏单元j的二元状态,θ={w,b,a}是模型参数:wij是可见单元i和隐藏单元j之间的权重,bj和ai是它们的偏差,V和H是可见单元和隐藏单元的数目。可见单元和隐藏单元的联合分布通过能量函数定义如下:
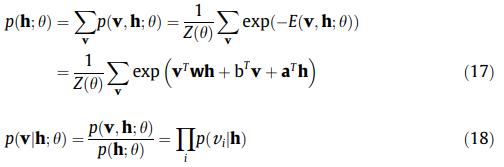
模型分配给可见向量v的概率通过对所有可能的隐藏向量求和得到:
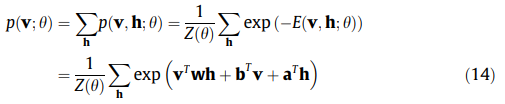
由于RBM的特殊二部结构,隐藏单元可以显式边缘化:

隐单元h和可见向量v的条件概率可以给出:
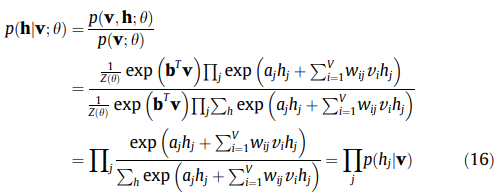
它类似于分配给隐藏向量h的概率和可视单位v的条件概率:
因为不存在隐藏-隐藏或可见-可见的连接,条件概率p(v | h)和p(h | v)是阶乘的,由下式给出:
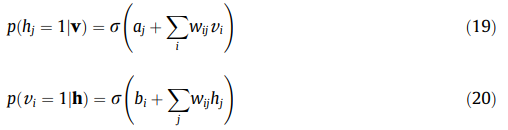
其中σ=1/(1+exp(-x))是逻辑函数。
2.2.2. 训练RBM
通过对训练数据的负对数似然概率进行随机梯度下降,学习RBM模型。可见层的负对数概率相对于模型参数θ的梯度可从式(14)中获得:
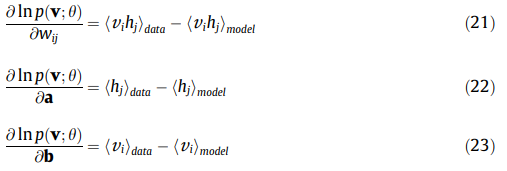
其中<·>data表示关于数据分布的期望,<·>model表示关于模型定义的分布的期望。前一个标记为正相位的项增加了训练数据的概率,而后一个标记为负相位的项降低了模型生成样本的概率。然而,期望<·>model难以计算(Salakhutdinov&Murray,2008)。因此,在实践中,使用所谓对比散度(CD)的梯度近似值(Hinton,2002),其中<·>model被Gibbs采样器代替,并在数据处启动。从可见光数据t出发,m阶吉布斯采样器如下:
第k步的条件概率p(h|v(k))和p(v|h(k))分别由等式计算。(19) 和(20)。设置m=∞可恢复最大似然学习。然而,在许多应用中,m=1(或CD1)的CD学习已经产生了足够的结果。使用等式。(21)–(23)和CD1学习,给出了参数θ的更新规则:
其中εw、εa、εb分别是权重、隐藏偏差和可见偏差的学习率。
在单个训练集上估计梯度后,权值可以更新。然而,如果将训练集分成10-100个小的“小批量”,则效率更高。我们假设一个最小的学习率乘以一个最小的学习率,这个最小的学习率乘以一个最小的学习率,不是小批量的总梯度(Hinton,2010)。
2.2.3. 高斯-伯努利RBM(GB-RBM)
最初,RBM是通过对可见层和隐藏层使用二元随机单元开发的。在处理实值数据时,用带独立高斯噪声的线性单元代替可见单元。GB-RBM的能量函数变为(Hinton,2010;Senoussaoui,Dehak,Kenny,Dehak,&Dumouchel,2012):
其中σi是可见单位vi的标准偏差。
概率函数的驱动方式如下:
在这种情况下,模型分配给可见向量v的概率变为:
此外,条件概率表示为:
其中g是逻辑函数,x是实数。
可以学习每个可见单元的噪声方差,但使用CD1很困难。在实际应用中,在用GB-RBM建模之前,数据被归一化为零均值和单位方差。这使得模型实现更加简单。
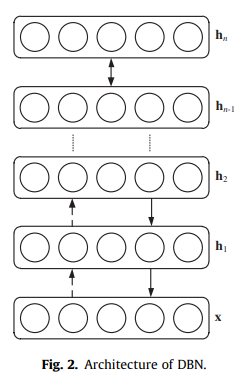
2.2.4. DBN体系结构
如图2所示,通过逐层堆叠多个rbm来形成DBN。该体系结构通过CD算法对rbm序列进行训练,保证了DBN的训练。训练过程如下所述:每个RBM层通过使用下层RBM的激活概率作为输入训练数据进行训练,其输出是上一RBM层的输入。请注意,这种学习过程所谓的预培训是无监督的。另外,第一RBM层输入原始输入数据,对于实值输入为GB-RBM,其他RBM层为二进制或Bernoulli-Bernoulli-RBM。
对于分类任务,生成性预训练可以紧跟或与其他典型的区分性学习过程相结合,这些学习过程可以微调所有权重以提高网络的性能。通过添加表示训练数据中提供的标签的额外变量层来执行这种区分性微调。然后,使用反向传播算法调整网络权值,方法与标准前馈神经网络相同。
3阀门故障实验
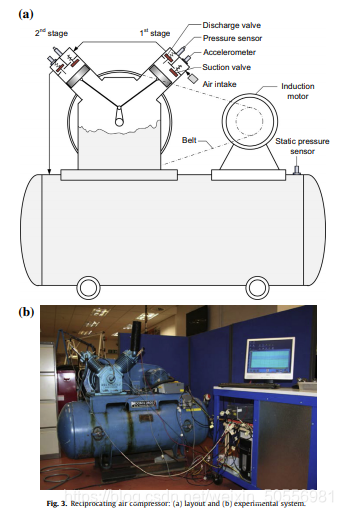
为了评估所提出的方案,我们的实验是在一个RC上进行的,该RC设计用于将0.55mpa到0.8mpa的空气压缩到工作在1.38mpa的最大压力下的接收器。该压缩机由两级组成,第一级(低压)压缩的空气通过风冷中冷器进入第二级(高压),然后储存在储气罐中。曲轴以440转/分的速度运行,由一台以1420转/分的速度运行的三相感应电动机通过两个V形皮带驱动。图3a和表1分别显示了该RC的布局,包括传感器位置和其他规范。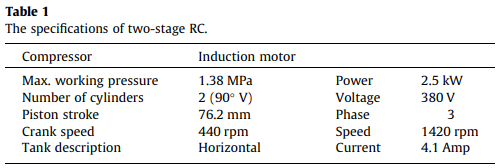
采用两级不同的吸入阀和排出阀的工作状态生成实验数据。其中一个是正常状态(NOR),而其他是吸入泄漏、排放泄漏和弹簧劣化。阀门的泄漏是通过在阀板上钻一个直径为1毫米的孔人工造成的。除正常工况外,故障工况为第一级排气泄漏(DL1)、第二级排气泄漏(DL2)、第二级排气弹簧故障(DS2)、第二级吸入弹簧故障(SS2)和第二级吸入泄漏(SL2)。
为了采集两级的振动和压力信号,在两级的顶部垂直安装了加速度计和压力传感器。详细地说,加速计安装在阀盖上,而压力传感器则安装在每个气缸盖的螺纹孔中。与上述信号相比,在感应电动机的a相上安装一个频率响应从直流到1.5kHz的霍尔效应电流传感器来测量该信号时,电流的设置更简单。另外还安装了一个静压传感器,用于在实验过程中连续监测储气罐中的压力。该压力不仅用于关闭驱动感应电机,还用于在预定压力下触发数据采集,该压力从0.0689 MPa(10 psi)开始到0.827 MPa(120 psi),间隔为0.0689 MPa(10 psi)。一旦达到每个预定压力,数据由16位分辨率的ADC系统采集,采样率为57142赫兹。该数据集由4个段组成,每个段包含118833个样品,涵盖了大约15个压缩机工作循环。因此,每种情况下,根据12个预定义压力值收集12个数据集,然后存储到PC机进行分析和分类。
4结果与讨论
4.1. 数据预处理、TKEO实现和特征提取
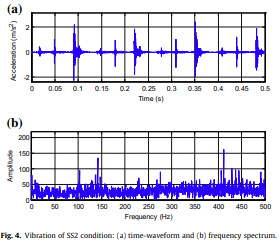
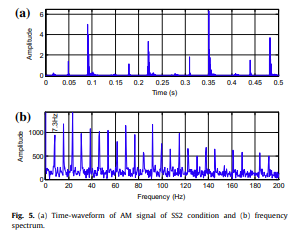
由于振动信号的非平稳性和噪声性,从振动信号的原始时间波形或其FFT谱中提取的特征不能为故障诊断提供正确的信息。例如,图4a和b显示了吸入弹簧故障状态(SS2)第二阶段的大约四分之一时间波形振动及其FFT谱。可以看出,由于RC的运动而产生的各种瞬态冲击和噪声是可观察到的。在FFT频谱中,主频(7.3hz)及其谐波几乎被掩埋在噪声中,这是一个有待识别的挑战。相反,在由DESA1从相同条件提取的AM信号的时域中,如图5a的时间波形所示,特征影响被突出显示并且噪声几乎被消除。此外,在图5b所示的频谱中,频率7.3 Hz及其谐波被清楚地辨别出来。显然,TKEO无需任何滤波技术就能有效地揭示振动信号的特征,去除噪声。TKEO应用于振动信号的优点是:(1)不需要带通滤波器,避免了对带通滤波器的中心频率和带宽的适当估计;(ii)由于DESA-1算法仅使用两个样本差来计算,因此TKEO的实现非常简单且计算效率高。
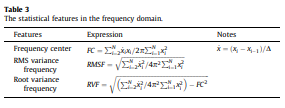
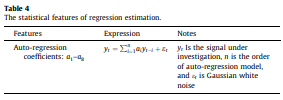
在提取信号特征之前,首先对数据进行预处理。如实验部分所述,对于每个预定义压力,数据包含4个段,每个段有118833个数据点。因此,为了增加特征集中的样本数,我们将每个数据除以4(一段),从而从每个阀状态获得48个数据样本(12个预定义压力×4)。然后,对振动数据集应用带DESA1算法的TKEO获得其AM信号。对于压力和电流信号,采用信号去噪技术去除测量信号中的随机噪声。这些技术和评价已发表在文献中,例如《Wang、He和Chen比较研究》(2009)和《Postalcioglu、Erkan和Bolat比较研究》(2005)。其中,基于小波变换的去噪方法在计算量小的前提下取得了较好的去噪效果,因此,本文采用小波去噪方法。研究了信号的几个基本函数和多分辨率分解层次。由于去噪只对信号进行平滑处理而不改变信号的主要特征,基本函数对最终分类结果没有影响。最后采用软阈值法、Daubechies最小非对称小波基函数(sym9)和三层小波去噪法对图像进行去噪。然后,从调幅、压力和电流信号中提取统计特征,包括时域的10个特征、频域的3个特征和回归估计的8个特征。表2-4相应地描述了这些特性。在振动和压力信号的情况下,我们得到了一个包含288个样本(6个故障类型×48个数据样本)和42个特征的特征集,这些特征是从两个压缩机级获得的特征数。在电流的情况下,获得288×21的特征集。

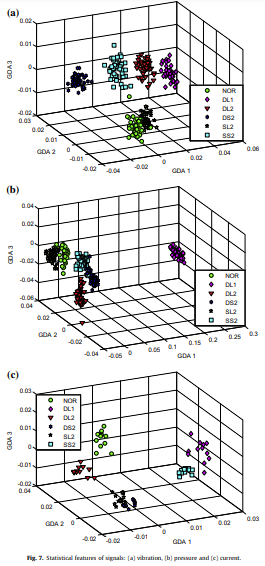
为了提高特征聚类间的分离度,提高诊断精度,降低特征维数,提高计算效率,将广义判别分析(GDA)方法(Baudat&Anouar,2000)应用于所获得的特征集。因此,如图6所示,保留在新空间中的特征集中的特征的数目对于振动是39,对于压力是24,对于电流是11。上述保留特征是基于协方差矩阵的特征值估计的,协方差矩阵只保留非零特征值的特征。通过可视化可以观察到特征在新特征空间中的分布。例如,在图7中直观地示出了不同条件的三个第一特征。可以看出,图7a和图c中的振动(AM信号)和电流的特征相对较好地聚集。只有NOR和SL2(振动情况)以及DS2和SL2(当前情况)的特征之间发生重叠。注意,在相同的条件下,如图7c所示的样本的数目小于48,这是因为多个特征具有导致重叠的相同值。另一方面,在第二阶段,NOR和SL2之间以及SS2和DL2之间的压力特征簇没有很好的分离。一般来说,在分类过程中,重叠会给分类带来困难。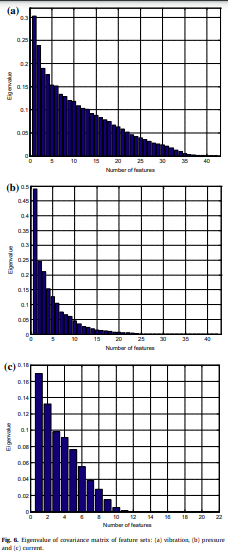
4.2. DBN分类结果
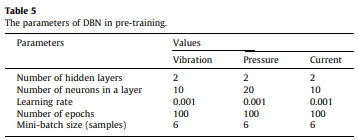
采用k-fold交叉验证方法将特征集随机划分为训练集和测试集,其中k取4。作为该划分的结果,生成4个子集,其中一个子集(72个样本)用作测试集,并且将其他子集放在一起以形成用于每次迭代中DBN学习的训练集(216个样本)。然后计算所有4个试验的平均误差。预训练中DBN分类器的参数根据信号配置,如表5所示。按照Hinton(2010)的建议,将最小批量大小设置为等于类的数量。在精车过程中,采用随机梯度下降法调整前一过程中最小批量相同的网络权值,学习率取0.01。在预训练和精车时,使用0.9的动量。为了说明DBN的随机性,在交叉验证的每次迭代中,分类过程重复5次,然后对分类结果进行平均。此外,为了说明动态贝叶斯网络在分类中的优越性,还对动态贝叶斯网络和两种著名的分类器进行了精度比较研究,包括在许多应用中比支持向量机(SVM)精度更高的相关向量机(RVM)(Tipping,2001)和bp神经网络(BPNN)。BPNN结构由10个隐藏层和10个神经元组成。该网络通过根据Levenberg–Marquardt优化更新权重和偏差值的函数进行训练。对于RVM分类器,定义为K(xi, xj)=exp(||xi-xj||/2γ2)的RBF核函数,其中C是确定核空间中映射样本的几何结构的核参数,用作本研究中的基本函数,并且设置为0.1。
测试模式下所有分类器的平均精度和标准差如表6所示。通过观察,DBN与其他分类器相比,提供了更好的精度。DBN对振动信号的分类准确率达到99.79%,高于RVM(99.3%)和BPNN(97.78%)。对于压力信号,DBN的平均准确率为97.58%,RVM为97.22%,BPNN为94.44%。与振动信号相比,由于阀门状态之间的特征聚类较差,所有分类器的分类精度都相对较低。对于当前信号,与压力信号相比,所有分类器都取得了更好的性能,其中DBN、RVM和BPNN的准确率分别为99.58%、98.61%和97.08%。然而,振动信号不如振动信号,说明振动信号是本研究中用于阀门故障诊断的较好信号。此外,分类器的标准差相对较小,表明分类精度接近平均值。从结果可以看出,DBN提供了比其他分类器更好的性能。可以说,以动态贝叶斯网络为代表的深度学习方法是机器学习技术的一个发展阶段,它有效地帮助提高了机器故障诊断的准确性。
5总结与结论
提出了一种利用感应电机振动、压力、电流三种常用信号进行RC阀门故障诊断的新方法。针对钢筋混凝土振动中经常出现的非平稳现象,采用了一种快速、高效的计算方法TKEO估计信号的振幅包络。针对压力和电流信号,采用基于小波变换的软阈值去噪技术对信号进行去噪。接下来,从这三个信号中提取时域和频域的统计特征。为了最大限度地提高特征集的条件可分性,连续使用GDA将特征映射到一个维数较小的新空间。最后,将特征输入到DBN、RVM和BPNN三个分类器中,对其性能进行评价。结果,DBN对于所有信号都不相等。因此,本文提出的以动态贝叶斯网络为分类器的阀门故障识别方法能够提高阀门故障识别的准确性,具有一定的故障诊断应用价值。

















 452
452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









