







简介
主页:https://hojonathanho.github.io/diffusion/
扩散模型 (diffusion models)是深度生成模型中新的SOTA。
扩散模型在图片生成任务中超越了原SOTA:GAN,并且在诸多应用领域都有出色的表现,如计算机视觉,NLP、波形信号处理、多模态建模、分子图建模、时间序列建模、对抗性净化等。
GAN要训练两个网络,训练难度大,容易不收敛,而且多样性比较差,毕竟生成器是为了骗过鉴别器,生成器可能学到稀奇古怪的技巧,
此外,扩散模型与其他研究领域有着密切的联系,如稳健学习、表示学习、强化学习。
然而,原始的扩散模型也有缺点,它的采样速度慢,通常需要数千个评估步骤才能抽取一个样本;它的最大似然估计无法和基于似然的模型相比;它泛化到各种数据类型的能力较差。
如今很多研究已经从实际应用的角度解决上述限制做出了许多努力,或从理论角度对模型能力进行了分析。但是,现在仍缺乏对扩散模型从算法到应用的最新进展的系统回顾。
基础知识

实现流程
生成式建模的一个核心问题是模型的灵活性和可计算性之间的权衡。
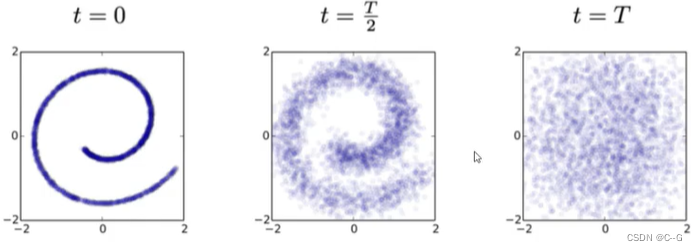
扩散模型的基本思想是正向扩散过程来系统地扰动数据中的分布,然后通过学习反向扩散过程恢复数据的分布,这样就了产生一个高度灵活且易于计算的生成模型。
前向过程
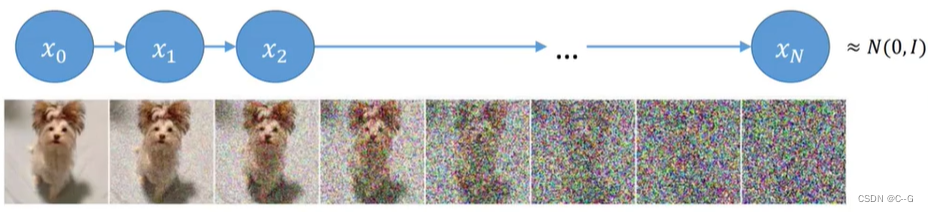
前向过程概括起来就是从原始图像
X
0
X_0
X0 开始,不断往图像中加入高斯噪声,每一个时刻由前一时刻的图像增加噪声得到,最后得到纯噪声的图像。这个过程可以看作是不断构建标签(高斯噪声)的过程。
构建 X t X_t Xt 时刻是公式如下:
X t = α t X t − 1 + 1 − α t Z X_t = \sqrt{\alpha_t} X_{t-1} + \sqrt{1-\alpha_t}Z Xt=αtXt−1+1−αtZ
其中 α t = 1 − β t \alpha_t = 1 - \beta_t αt=1−βt
β \beta β 随着时刻 t 增大而增加,论文从0.0001 增加到 0.002。那么 α \alpha α 随着时刻 t 增大而减少,这表明了后一时刻的图像对前一时刻的图像的依赖逐渐减少,高斯噪声的权重逐渐增大,最后得到纯噪声的图像
从 X 0 X_0 X0 开始往后迭代可以得到每一时刻的分布,但是这个过程过于繁琐且消耗大量计算资源,可不可以根据 X 0 X_0 X0 获取任意指定时刻的分布呢?
-
步骤一
首先,时刻 t 的图像记为 X t X_t Xt,前一时刻 t-1 的图像记为 X t − 1 X_{t-1} Xt−1,这里使用 Z 表示高斯分布
已知, X t = α t X t − 1 + 1 − α t Z X_t = \sqrt{\alpha_t} X_{t-1} + \sqrt{1-\alpha_t}Z Xt=αtXt−1+1−αtZ
将 X t − 1 = α t − 1 X t − 2 + 1 − α t − 1 Z X_{t-1} = \sqrt{\alpha_{t-1}} X_{t-2} + \sqrt{1-\alpha_{t-1}}Z Xt−1=αt−1Xt−2+1−αt−1Z 代入上述公式,取代 X t − 1 X_{t-1} Xt−1,得到
X t = α t ( α t − 1 X t − 2 + 1 − α t − 1 Z ) + 1 − α t Z X_t = \sqrt{\alpha_t} (\sqrt{\alpha_{t-1}} X_{t-2} + \sqrt{1-\alpha_{t-1}}Z) + \sqrt{1-\alpha_t}Z Xt=αt(αt−1Xt−2+1−αt−1Z)+1−αtZ
化简得
X t = α t α t − 1 X t − 2 + α t − α t α t − 1 Z + 1 − α t Z X_t = \sqrt{\alpha_t \alpha_{t-1}} X_{t-2} + \sqrt{\alpha_t-\alpha_t\alpha_{t-1}}Z + \sqrt{1-\alpha_t}Z Xt=αtαt−1Xt−2+αt−αtαt−1Z+1−αtZ
-
步骤二
高斯分布 Z ∼ N ( 0 , I ) Z \sim \Nu(0,I) Z∼N(0,I)
α t − α t α t − 1 Z ∼ N ( 0 , α t − α t α t − 1 ) \sqrt{\alpha_t - \alpha_t \alpha_{t-1}}Z \sim \Nu(0,\alpha_t - \alpha_t\alpha_{t-1}) αt−αtαt−1Z∼N(0,αt−αtαt−1)
1 − α t Z ∼ N ( 0 , 1 − α t ) \sqrt{1-\alpha_t}Z \sim \Nu(0,1-\alpha_t) 1−αtZ∼N(0,1−αt)
由于高斯分布符合以下规律
N ( 0 , σ 1 2 I ) + N ( 0 , σ 2 2 I ) ∼ N ( 0 , ( σ 1 2 + σ 2 2 ) I ) \Nu(0,\sigma^2_1 I) + \Nu(0,\sigma^2_2 I) \sim \Nu(0,(\sigma^2_1 + \sigma^2_2)I) N(0,σ12I)+N(0,σ22I)∼N(0,(σ12+σ22)I)
所以
α t − α t α t − 1 Z + 1 − α t Z ∼ N ( 0 , 1 − α t α t − 1 ) \sqrt{\alpha_t-\alpha_t\alpha_{t-1}}Z + \sqrt{1-\alpha_t}Z\sim \Nu(0,1-\alpha_t\alpha_{t-1}) αt−αtαt−1Z+1−αtZ∼N(0,1−αtαt−1)
从步骤一得到的公式:
X t = α t α t − 1 X t − 2 + α t − α t α t − 1 Z + 1 − α t Z X_t = \sqrt{\alpha_t \alpha_{t-1}} X_{t-2} + \sqrt{\alpha_t-\alpha_t\alpha_{t-1}}Z + \sqrt{1-\alpha_t}Z Xt=αtαt−1Xt−2+αt−αtαt−1Z+1−αtZ
化简可得
X t = α t α t − 1 X t − 2 + 1 − α t α t − 1 Z X_t = \sqrt{\alpha_t \alpha_{t-1}} X_{t-2} + \sqrt{1-\alpha_t\alpha_{t-1}} Z Xt=αtαt−1Xt−2+1−αtαt−1Z
从而可以推出
X t = α ˉ X 0 + 1 − α ˉ Z X_t = \sqrt{ \bar{\alpha}} X_0 + \sqrt{1-\bar{\alpha}} Z Xt=αˉX0+1−αˉZ,( α ˉ \bar{\alpha} αˉ 表示连乘)
我们现在可以实现加噪声的过程了,但是目的是去噪生成,也就是接下来的逆向过程
逆向过程
那么我们回到我们的初始目的,如何从 T N T_N TN 时刻分布 X t X_t Xt 一步一步往前推得到生成目标图像 X 0 X_0 X0 呢?
回到原始公式
X t = α t X t − 1 + 1 − α t Z X_t = \sqrt{\alpha_t} X_{t-1} + \sqrt{1-\alpha_t}Z Xt=αtXt−1+1−αtZ
那么我们要如何使用 X t X_t Xt 表示 X t − 1 X_{t-1} Xt−1呢
-
步骤一
这里使用贝叶斯公式
q ( X t − 1 ∣ X t ) = q ( X t ∣ X t − 1 ) q ( X t − 1 ) q ( X t ) q(X_{t-1}|X_t) = q(X_t|X_{t-1}) \frac{q(X_{t-1})}{q(X_t)} q(Xt−1∣Xt)=q(Xt∣Xt−1)q(Xt)q(Xt−1)
在前向过程,任意时刻 t 的分布 X t X_t Xt 可以由 X 0 X_0 X0 表示
X t = α ˉ X 0 + 1 − α ˉ Z X_t = \sqrt{ \bar{\alpha}} X_0 + \sqrt{1-\bar{\alpha}} Z Xt=αˉX0+1−αˉZ,( α ˉ \bar{\alpha} αˉ 表示连乘)
那么套用贝叶斯的原始公式可以使用初始条件 X 0 X_0 X0 表示
q ( X t − 1 ∣ X t , X 0 ) = q ( X t ∣ X t − 1 , X 0 ) q ( X t − 1 ∣ X 0 ) q ( X t ∣ X 0 ) q(X_{t-1}|X_t,X_0) = q(X_t|X_{t-1},X_0) \frac{q(X_{t-1} | X_0)}{q(X_t | X_0)} q(Xt−1∣Xt,X0)=q(Xt∣Xt−1,X0)q(Xt∣X0)q(Xt−1∣X0)
右边三项未知数可以表示为:
q ( X t − 1 ∣ X 0 ) : α ˉ t − 1 X 0 + 1 − α ˉ t − 1 Z ∼ N ( α ˉ t − 1 X 0 , 1 − α ˉ t − 1 ) q(X_{t-1} | X_0) : \sqrt{\bar{\alpha}_{t-1}}X_0 + \sqrt{1-\bar{\alpha}_{t-1}}Z \sim \Nu(\sqrt{\bar{\alpha}_{t-1}}X_0,1-\bar{\alpha}_{t-1}) q(Xt−1∣X0):αˉt−1X0+1−αˉt−1Z∼N(αˉt−1X0,1−αˉt−1)
q ( X t ∣ X 0 ) : α ˉ t X 0 + 1 − α ˉ t Z ∼ N ( α ˉ t X 0 , 1 − α ˉ t ) q(X_{t} | X_0) : \sqrt{\bar{\alpha}_{t}}X_0 + \sqrt{1-\bar{\alpha}_{t}}Z \sim \Nu(\sqrt{\bar{\alpha}_{t}}X_0,1-\bar{\alpha}_{t}) q(Xt∣X0):αˉtX0+1−αˉtZ∼N(αˉtX0,1−αˉt)
q ( X t ∣ X t − 1 , X 0 ) : α t X t − 1 + 1 − α t Z ∼ N ( α t X t − 1 , 1 − α t ) q(X_{t} | X_{t-1} , X_0) : \sqrt{\alpha_t} X_{t-1} + \sqrt{1-\alpha_t}Z \sim \Nu(\sqrt{{\alpha}_{t}}X_{t-1},1-{\alpha}_{t}) q(Xt∣Xt−1,X0):αtXt−1+1−αtZ∼N(αtXt−1,1−αt)
将上面三条公式带入贝叶斯公式
q ( X t − 1 ∣ X t , X 0 ) = q ( X t ∣ X t − 1 , X 0 ) q ( X t − 1 ∣ X 0 ) q ( X t ∣ X 0 ) q(X_{t-1}|X_t,X_0) = q(X_t|X_{t-1},X_0) \frac{q(X_{t-1} | X_0)}{q(X_t | X_0)} q(Xt−1∣Xt,X0)=q(Xt∣Xt−1,X0)q(Xt∣X0)q(Xt−1∣X0)
我们知道高斯分布 Z = e − 1 2 ( x − μ ) 2 σ 2 Z = e^{-\frac{1}{2} \frac{(x-\mu)^2}{\sigma^2}} Z=e−21σ2(x−μ)2
化简得到
X t − 1 = e ( − 1 2 ( ( x t − α t X t − 1 ) 2 β t + ( X t − 1 − α ˉ t − 1 X 0 ) 2 1 − α ˉ t − 1 − ( X t − α ˉ t X 0 ) 2 1 − α ˉ t ) ) X_{t-1} = e^{ (-\frac{1}{2} ( \frac{(x_t - \sqrt{\alpha_t} X_{t-1})^2}{\beta_t} +\frac{(X_{t-1} - \sqrt{\bar{\alpha}_{t-1}}X_0)^2}{1-\bar{\alpha}_{t-1}} - \frac{(X_t-\sqrt{\bar{\alpha}_t}X_0)^2}{1-\bar{\alpha}_t} ))} Xt−1=e(−21(βt(xt−αtXt−1)2+1−αˉt−1(Xt−1−αˉt−1X0)2−1−αˉt(Xt−αˉtX0)2))
-
步骤二
将步骤一的 X t − 1 X_{t-1} Xt−1 表达式展开后,汇总化简得到
e ( − 1 2 ( ( α t β t + 1 1 − α ˉ t − 1 ) X t − 1 2 − ( 2 α t β t X t + 2 α ˉ t − 1 1 − α ˉ t − 1 X 0 ) X t − 1 + C ( X t , X 0 ) ) ) e^{( -\frac{1}{2} ( (\frac{\alpha_t}{\beta_t} + \frac{1}{1-\bar{\alpha}_{t-1}} ) X^2_{t-1} - ( \frac{2\sqrt{\alpha_t}}{\beta_t}X_t + \frac{2\sqrt{\bar{\alpha}_{t-1}}}{1-\bar{\alpha}_{t-1}}X_0 )X_{t-1} +C(X_t,X_0) ) )} e(−21((βtαt+1−αˉt−11)Xt−12−(βt2αtXt+1−αˉt−12αˉt−1X0)Xt−1+C(Xt,X0)))
C ( X t , X 0 ) C(X_t,X_0) C(Xt,X0) 为常数项,不影响任务,核心是求 X t X_t Xt 与 X t − 1 X_{t-1} Xt−1 的关系。
将高斯分布(Z) 展开后为
Z = e ( − ( x − μ ) 2 2 σ 2 ) = e ( − 1 2 ( 1 σ 2 X 2 − 2 μ σ 2 X + μ 2 σ 2 ) ) Z = e^{(-\frac{ (x-\mu)^2 }{2\sigma^2})} = e^{ (-\frac{1}{2} ( \frac{1}{\sigma^2}X^2 - \frac{2\mu}{\sigma^2}X + \frac{\mu^2}{\sigma^2} ) ) } Z=e(−2σ2(x−μ)2)=e(−21(σ21X2−σ22μX+σ2μ2))
对比 高斯分布(Z) 展开后公式 与 上述得到的 X t − 1 X_{t-1} Xt−1 表达式,可以得到 均值 和 方差
1 σ 2 = ( α t β t + 1 1 − α ˉ t − 1 ) \frac{1}{\sigma^2} =(\frac{\alpha_t}{\beta_t} + \frac{1}{1-\bar{\alpha}_{t-1}} ) σ21=(βtαt+1−αˉt−11)σ = 1 − α ˉ t − 1 1 − α ˉ t β t \sigma = \frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_t} \beta_t σ=1−αˉt1−αˉt−1βt
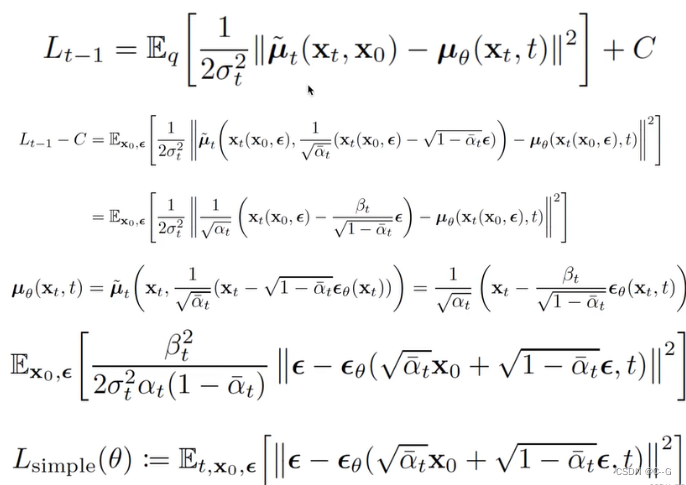
μ ~ ( X t , X 0 ) = α t ( 1 − α ˉ t − 1 ) 1 − α ˉ t X t + α ˉ t − 1 β t 1 − α ˉ t X 0 \tilde{\mu}(X_t,X_0) = \frac{\sqrt{\alpha}_t (1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_t}X_t + \frac{\sqrt{\bar{\alpha}_{t-1}} \beta_t}{1-\bar{\alpha}_t}X_0 μ~(Xt,X0)=1−αˉtαt(1−αˉt−1)Xt+1−αˉtαˉt−1βtX0
其中 X 0 X_0 X0 未知,但是我们知道 X t X_t Xt 可以由 X 0 X_0 X0 得到,那么将原公式逆过来
X t = α ˉ X 0 + 1 − α ˉ Z X_t = \sqrt{ \bar{\alpha}} X_0 + \sqrt{1-\bar{\alpha}} Z Xt=αˉX0+1−αˉZ,( α ˉ \bar{\alpha} αˉ 表示连乘)
X 0 = 1 α ˉ t ( X t − 1 − α ˉ t Z ) X_0 = \frac{1}{\sqrt{\bar{\alpha}_t}} (X_t - \sqrt{1-\bar{\alpha}_t} Z) X0=αˉt1(Xt−1−αˉtZ)
再将 X 0 X_0 X0 带入均值表达式,化简得
μ ~ t = 1 α t ( X t − β t 1 − α ˉ t Z ) \tilde{\mu}_t = \frac{1}{\sqrt{\alpha_t}} (X_t - \frac{\beta_t}{\sqrt{1-\bar{\alpha}_t}}Z) μ~t=αt1(Xt−1−αˉtβtZ)
-
步骤三
每一时刻的 X t X_t Xt 都是一个高斯分布,因此,可以通过高斯分布重采样策略得到 X t − 1 X_{t-1} Xt−1
我们现在得到了有样本 X 得到的分布 X ∼ N ( μ , σ 2 ) X \sim N(\mu, \sigma^2) X∼N(μ,σ2)。采样这个操作本身是不可导的,但是我们可以通过重参数化技巧,将简单分布的采样结果变换到特定分布中,如此一来则可以对变换过程进行求导。具体而言,我们从标准高斯分布中采样,并将其变换到 X ∼ N ( μ , σ 2 ) X \sim N(\mu, \sigma^2) X∼N(μ,σ2),过程如下
ε ∼ N ( 0 , I ) \varepsilon \sim \Nu(0,I) ε∼N(0,I)
Z = μ + σ × ε Z = \mu + \sigma \times \varepsilon Z=μ+σ×ε也就是说,从 N ( μ , σ 2 ) \Nu(\mu,\sigma^2) N(μ,σ2) 采样 Z Z Z,等同于从 ε ∼ N ( 0 , I ) \varepsilon \sim \Nu(0,I) ε∼N(0,I) 中采样高斯噪声 ε \varepsilon ε,再将其按 Z = μ + σ × ε Z = \mu + \sigma \times \varepsilon Z=μ+σ×ε 变换
X t − 1 = μ ~ t + σ t Z ∼ N ( μ ~ t , σ t ) X_{t-1} = \tilde{\mu}_t + \sigma_tZ \sim \Nu(\tilde{\mu}_t,\sigma_t) Xt−1=μ~t+σtZ∼N(μ~t,σt)
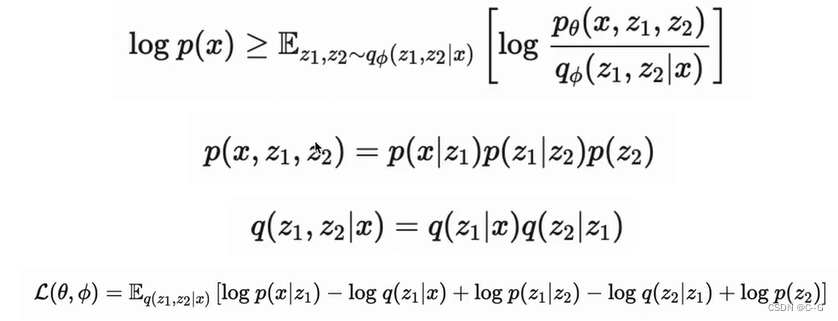
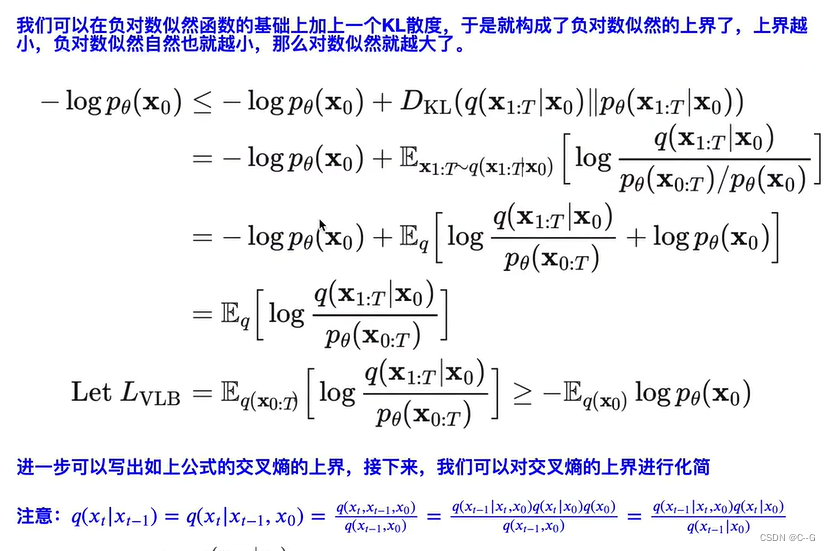
目标数据分布的似然函数
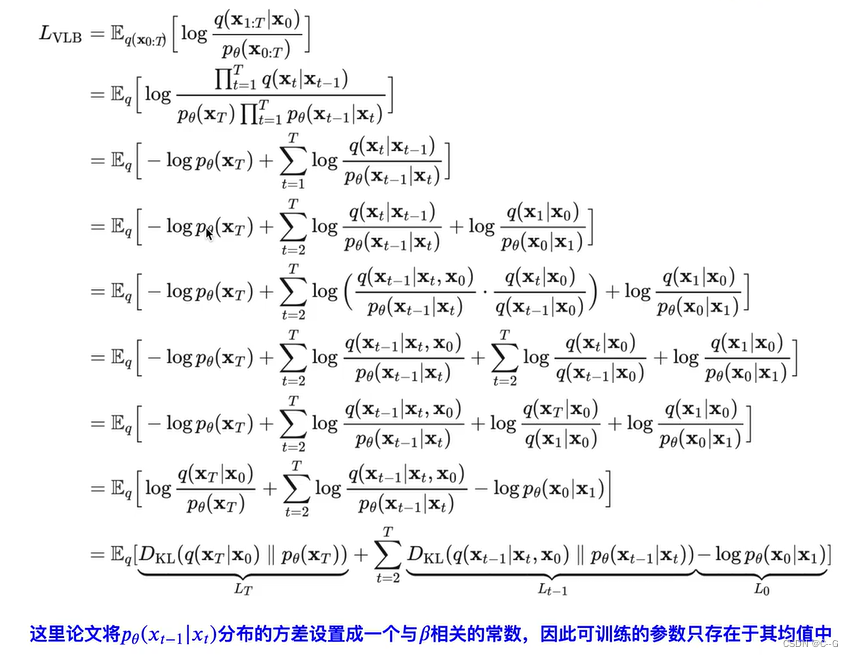
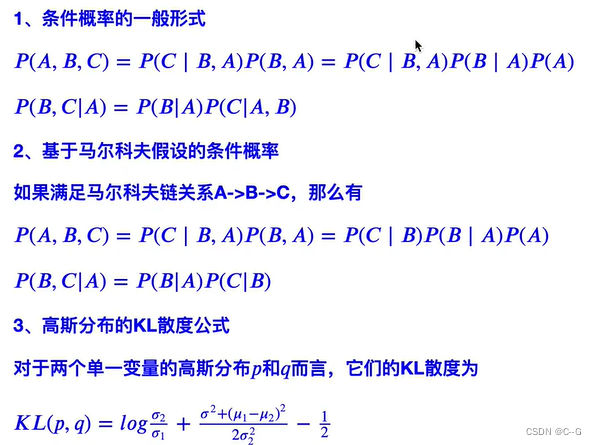
对于两个单一变量的高斯分布 p 和 q而言,KL散度为
K
L
(
p
,
q
)
=
log
σ
2
σ
1
+
σ
1
2
+
(
μ
1
−
μ
2
)
2
2
σ
2
2
−
1
2
KL(p,q) = \log \frac{\sigma_2}{\sigma_1} + \frac{\sigma_1^2 + (\mu_1 - \mu_2)^2}{2\sigma_2^2} - \frac{1}{2}
KL(p,q)=logσ1σ2+2σ22σ12+(μ1−μ2)2−21
伪代码
总体网络可以采用了简单的U-net实现
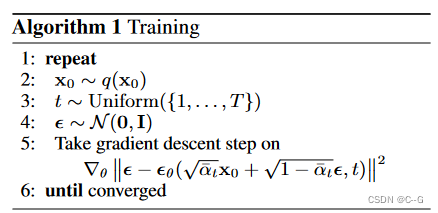
Training
目标:让网络预测不同时刻的高斯分布
ε
θ
\varepsilon_\theta
εθ
首先从数据集中随机采样图像
X
0
X_0
X0,选取超参数时刻上限
T
T
T,在
1
,
.
.
.
,
T
1,...,T
1,...,T 中随机采样时刻(batch size)并为此生成时刻对应的高斯分布
ε
\varepsilon
ε,根据公式
X t = α ˉ X 0 + 1 − α ˉ Z X_t = \sqrt{ \bar{\alpha}} X_0 + \sqrt{1-\bar{\alpha}} Z Xt=αˉX0+1−αˉZ,( α ˉ \bar{\alpha} αˉ 表示连乘)
将 t 时刻的分布 X t X_t Xt 和时刻 t 输入网络,其中时刻 t 经过位置编码后与 X t X_t Xt 拼接,网络预测得到时刻 t 的高斯分布 ε θ \varepsilon_\theta εθ,将其与对应时刻的高斯分布 ε \varepsilon ε 作 L 2 L_2 L2 损失
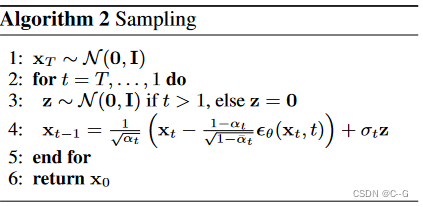
Sampling
分布
X
t
X_t
Xt 由高斯分布给出,进行
T
T
T 次循环,从模型
ε
θ
(
X
t
,
t
)
\varepsilon_\theta(X_t,t)
εθ(Xt,t)中获取时刻 t 的高斯分布预测值
ε
θ
\varepsilon_\theta
εθ,通过公式:
X t − 1 = μ ~ t + σ t Z ∼ N ( μ ~ t , σ t ) X_{t-1} = \tilde{\mu}_t + \sigma_tZ \sim \Nu(\tilde{\mu}_t,\sigma_t) Xt−1=μ~t+σtZ∼N(μ~t,σt)
预测前一时刻的分布 X t − 1 X_{t-1} Xt−1,循环该过程得到最终图像 X 0 X_0 X0
扩散模型代码
class GaussianDiffusion:
"""
Contains utilities for the diffusion model.
"""
def __init__(self, *, betas, loss_type, tf_dtype=tf.float32):
self.loss_type = loss_type
assert isinstance(betas, np.ndarray)
self.np_betas = betas = betas.astype(np.float64) # computations here in float64 for accuracy
assert (betas > 0).all() and (betas <= 1).all()
timesteps, = betas.shape
self.num_timesteps = int(timesteps)
alphas = 1. - betas
alphas_cumprod = np.cumprod(alphas, axis=0)
alphas_cumprod_prev = np.append(1., alphas_cumprod[:-1])
assert alphas_cumprod_prev.shape == (timesteps,)
self.betas = tf.constant(betas, dtype=tf_dtype)
self.alphas_cumprod = tf.constant(alphas_cumprod, dtype=tf_dtype)
self.alphas_cumprod_prev = tf.constant(alphas_cumprod_prev, dtype=tf_dtype)
# calculations for diffusion q(x_t | x_{t-1}) and others
self.sqrt_alphas_cumprod = tf.constant(np.sqrt(alphas_cumprod), dtype=tf_dtype)
self.sqrt_one_minus_alphas_cumprod = tf.constant(np.sqrt(1. - alphas_cumprod), dtype=tf_dtype)
self.log_one_minus_alphas_cumprod = tf.constant(np.log(1. - alphas_cumprod), dtype=tf_dtype)
self.sqrt_recip_alphas_cumprod = tf.constant(np.sqrt(1. / alphas_cumprod), dtype=tf_dtype)
self.sqrt_recipm1_alphas_cumprod = tf.constant(np.sqrt(1. / alphas_cumprod - 1), dtype=tf_dtype)
# -------------- 方差
# calculations for posterior q(x_{t-1} | x_t, x_0)
posterior_variance = betas * (1. - alphas_cumprod_prev) / (1. - alphas_cumprod)
# above: equal to 1. / (1. / (1. - alpha_cumprod_tm1) + alpha_t / beta_t)
self.posterior_variance = tf.constant(posterior_variance, dtype=tf_dtype)
# below: log calculation clipped because the posterior variance is 0 at the beginning of the diffusion chain
# sqrt_alphas sqrt_0.0001 一开始很小 为了避免为0,取对数
self.posterior_log_variance_clipped = tf.constant(np.log(np.maximum(posterior_variance, 1e-20)), dtype=tf_dtype)
# -------------- 均值
# 知道 X_0 的情况下计算 均值 后部分
self.posterior_mean_coef1 = tf.constant(
betas * np.sqrt(alphas_cumprod_prev) / (1. - alphas_cumprod), dtype=tf_dtype)
# 知道 X_0 的情况下计算 均值 前部分
self.posterior_mean_coef2 = tf.constant(
(1. - alphas_cumprod_prev) * np.sqrt(alphas) / (1. - alphas_cumprod), dtype=tf_dtype)
@staticmethod
def _extract(a, t, x_shape):
"""
从 a 中按t抽取元素
Extract some coefficients at specified timesteps,
then reshape to [batch_size, 1, 1, 1, 1, ...] for broadcasting purposes.
"""
bs, = t.shape
assert x_shape[0] == bs
out = tf.gather(a, t)
assert out.shape == [bs]
return tf.reshape(out, [bs] + ((len(x_shape) - 1) * [1]))
# ======================= 加噪过程 q(z | x) =======================
def q_mean_variance(self, x_start, t):
"""
加噪过程 计算 X_t 均值和方差
"""
mean = self._extract(self.sqrt_alphas_cumprod, t, x_start.shape) * x_start
variance = self._extract(1. - self.alphas_cumprod, t, x_start.shape)
log_variance = self._extract(self.log_one_minus_alphas_cumprod, t, x_start.shape)
return mean, variance, log_variance
def q_sample(self, x_start, t, noise=None):
"""
Diffuse the data (t == 0 means diffused for 1 step)
根据 X_0,t 计算 X_t 时刻分布
"""
if noise is None:
noise = tf.random_normal(shape=x_start.shape)
assert noise.shape == x_start.shape
return (
self._extract(self.sqrt_alphas_cumprod, t, x_start.shape) * x_start +
self._extract(self.sqrt_one_minus_alphas_cumprod, t, x_start.shape) * noise
)
# ======================= 模型损失、验证 =======================
def p_losses(self, denoise_fn, x_start, t, noise=None):
"""
Training loss calculation
训练过程,模型 预测噪声 与 标注正态分布
"""
B, H, W, C = x_start.shape.as_list()
assert t.shape == [B]
if noise is None:
noise = tf.random_normal(shape=x_start.shape, dtype=x_start.dtype)
assert noise.shape == x_start.shape and noise.dtype == x_start.dtype
x_noisy = self.q_sample(x_start=x_start, t=t, noise=noise)
x_recon = denoise_fn(x_noisy, t)
assert x_noisy.shape == x_start.shape
assert x_recon.shape[:3] == [B, H, W] and len(x_recon.shape) == 4
if self.loss_type == 'noisepred':
# predict the noise instead of x_start. seems to be weighted naturally like SNR
assert x_recon.shape == x_start.shape
losses = nn.meanflat(tf.squared_difference(noise, x_recon))
else:
raise NotImplementedError(self.loss_type)
assert losses.shape == [B]
return losses
# ======================= 去噪过程 p(z | x) =======================
def q_posterior(self, x_start, x_t, t):
"""
Compute the mean and variance of the diffusion posterior q(x_{t-1} | x_t, x_0)
根据 x_0 x_t t 计算方差 和 均值
"""
assert x_start.shape == x_t.shape
posterior_mean = (
self._extract(self.posterior_mean_coef1, t, x_t.shape) * x_start +
self._extract(self.posterior_mean_coef2, t, x_t.shape) * x_t
)
posterior_variance = self._extract(self.posterior_variance, t, x_t.shape)
posterior_log_variance_clipped = self._extract(self.posterior_log_variance_clipped, t, x_t.shape)
assert (posterior_mean.shape[0] == posterior_variance.shape[0] == posterior_log_variance_clipped.shape[0] ==
x_start.shape[0])
return posterior_mean, posterior_variance, posterior_log_variance_clipped
def predict_start_from_noise(self, x_t, t, noise):
"""
根据 X_t t 计算 X_0
"""
assert x_t.shape == noise.shape
return (
self._extract(self.sqrt_recip_alphas_cumprod, t, x_t.shape) * x_t -
self._extract(self.sqrt_recipm1_alphas_cumprod, t, x_t.shape) * noise
)
def p_mean_variance(self, denoise_fn, *, x, t, clip_denoised: bool):
"""
去噪过程获取 均值 和 方差
"""
if self.loss_type == 'noisepred':
x_recon = self.predict_start_from_noise(x, t=t, noise=denoise_fn(x, t))
else:
raise NotImplementedError(self.loss_type)
if clip_denoised:
x_recon = tf.clip_by_value(x_recon, -1., 1.)
model_mean, posterior_variance, posterior_log_variance = self.q_posterior(x_start=x_recon, x_t=x, t=t)
assert model_mean.shape == x_recon.shape == x.shape
assert posterior_variance.shape == posterior_log_variance.shape == [x.shape[0], 1, 1, 1]
return model_mean, posterior_variance, posterior_log_variance
def p_sample(self, denoise_fn, *, x, t, noise_fn, clip_denoised=True, repeat_noise=False):
"""
Sample from the model
计算 X_t
"""
model_mean, _, model_log_variance = self.p_mean_variance(denoise_fn, x=x, t=t, clip_denoised=clip_denoised)
noise = noise_like(x.shape, noise_fn, repeat_noise)
assert noise.shape == x.shape
# no noise when t == 0
nonzero_mask = tf.reshape(1 - tf.cast(tf.equal(t, 0), tf.float32), [x.shape[0]] + [1] * (len(x.shape) - 1))
# tf.exp(0.5 * model_log_variance) 去掉 log
return model_mean + nonzero_mask * tf.exp(0.5 * model_log_variance) * noise
def p_sample_loop(self, denoise_fn, *, shape, noise_fn=tf.random_normal):
"""
Generate samples
循环 去噪过程
"""
i_0 = tf.constant(self.num_timesteps - 1, dtype=tf.int32)
assert isinstance(shape, (tuple, list))
img_0 = noise_fn(shape=shape, dtype=tf.float32)
_, img_final = tf.while_loop(
cond=lambda i_, _: tf.greater_equal(i_, 0),
body=lambda i_, img_: [
i_ - 1,
self.p_sample(denoise_fn=denoise_fn, x=img_, t=tf.fill([shape[0]], i_), noise_fn=noise_fn)
],
loop_vars=[i_0, img_0],
shape_invariants=[i_0.shape, img_0.shape],
back_prop=False
)
assert img_final.shape == shape
return img_final
# ======================= 验证过程 =======================
def p_sample_loop_trajectory(self, denoise_fn, *, shape, noise_fn=tf.random_normal, repeat_noise_steps=-1):
"""
生成样本,返回中间图像用于可视化去噪图像如何随时间演变
Generate samples, returning intermediate images
Useful for visualizing how denoised images evolve over time
Args:
repeat_noise_steps (int): Number of denoising timesteps in which the same noise
is used across the batch. If >= 0, the initial noise is the same for all batch elemements.
"""
i_0 = tf.constant(self.num_timesteps - 1, dtype=tf.int32)
assert isinstance(shape, (tuple, list))
img_0 = noise_like(shape, noise_fn, repeat_noise_steps >= 0)
times = tf.Variable([i_0])
imgs = tf.Variable([img_0])
# 相同噪声的步骤
# Steps with repeated noise
times, imgs = tf.while_loop(
cond=lambda times_, _: tf.less_equal(self.num_timesteps - times_[-1], repeat_noise_steps),
body=lambda times_, imgs_: [
tf.concat([times_, [times_[-1] - 1]], 0),
tf.concat([imgs_, [self.p_sample(denoise_fn=denoise_fn,
x=imgs_[-1],
t=tf.fill([shape[0]], times_[-1]),
noise_fn=noise_fn,
repeat_noise=True)]], 0)
],
loop_vars=[times, imgs],
shape_invariants=[tf.TensorShape([None, *i_0.shape]),
tf.TensorShape([None, *img_0.shape])],
back_prop=False
)
# 每个批处理元素具有不同噪声的步骤
# Steps with different noise for each batch element
times, imgs = tf.while_loop(
cond=lambda times_, _: tf.greater_equal(times_[-1], 0),
body=lambda times_, imgs_: [
tf.concat([times_, [times_[-1] - 1]], 0),
tf.concat([imgs_, [self.p_sample(denoise_fn=denoise_fn,
x=imgs_[-1],
t=tf.fill([shape[0]], times_[-1]),
noise_fn=noise_fn,
repeat_noise=False)]], 0)
],
loop_vars=[times, imgs],
shape_invariants=[tf.TensorShape([None, *i_0.shape]),
tf.TensorShape([None, *img_0.shape])],
back_prop=False
)
assert imgs[-1].shape == shape
return times, imgs
def interpolate(self, denoise_fn, *, shape, noise_fn=tf.random_normal):
"""
在图像之间插入。
Interpolate between images.
t == 0 means diffuse images for 1 timestep before mixing.
"""
assert isinstance(shape, (tuple, list))
# 占位符,用于插入真实样本
# Placeholders for real samples to interpolate
x1 = tf.placeholder(tf.float32, shape)
x2 = tf.placeholder(tf.float32, shape)
# lam == 0.5 averages diffused images.
lam = tf.placeholder(tf.float32, shape=())
t = tf.placeholder(tf.int32, shape=())
# 通过前向扩散添加噪声
# Add noise via forward diffusion
# TODO: use the same noise for both endpoints?
# t_batched = tf.constant([t] * x1.shape[0], dtype=tf.int32)
t_batched = tf.stack([t] * x1.shape[0])
xt1 = self.q_sample(x1, t=t_batched)
xt2 = self.q_sample(x2, t=t_batched)
# Mix latents
# Linear interpolation
xt_interp = (1 - lam) * xt1 + lam * xt2
# Constant variance interpolation
# xt_interp = tf.sqrt(1 - lam * lam) * xt1 + lam * xt2
# Reverse diffusion (similar to self.p_sample_loop)
# t = tf.constant(t, dtype=tf.int32)
_, x_interp = tf.while_loop(
cond=lambda i_, _: tf.greater_equal(i_, 0),
body=lambda i_, img_: [
i_ - 1,
self.p_sample(denoise_fn=denoise_fn, x=img_, t=tf.fill([shape[0]], i_), noise_fn=noise_fn)
],
loop_vars=[t, xt_interp],
shape_invariants=[t.shape, xt_interp.shape],
back_prop=False
)
assert x_interp.shape == shape
return x1, x2, lam, x_interp, t














 255
255











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









