







第七章 卷积神经网络
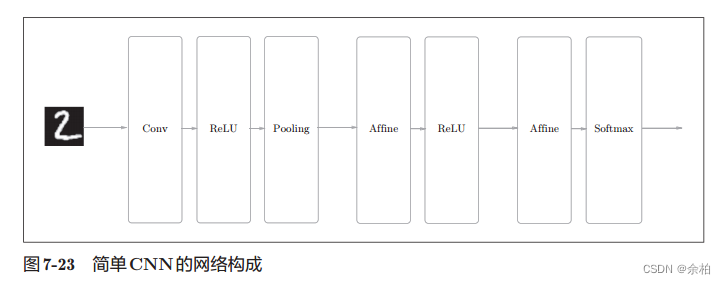
1. 整体结构


2.卷积层
在全连接层中,相邻层的神经元全部连接在一起,输出的数量可以任意决定,但是会忽略数据的形状(图像通常是高、长、通道方向上的3维形状,全连接层需要使用一维数据)而卷积层可以保持形状不变。
CNN 中,有时将卷积层的输入输出数据称为特征图(feature map)。其中,卷积层的输入数据称为输入特征图(input feature map),输出数据称为输出特征图(output feature map)。
- 卷积运算

滤波器要奇数个大小
- 填充
卷积运算的填充处理:向输入数据的周围填入0,调整输出的大小。(为如果每次进行卷积运算都会缩小空间,那么在某个时刻输出大小就有可能变为 1,导致无法再应用卷积运算。)
valid不填充:输出(N-F=1)(N-F=1)
same填充:输出与原图大小一致(N+2P-F+1)(N+2P-F+1)
- 步幅
应用滤波器的位置间隔称为步幅(stride)。增大步幅后,输出大小会变小。而增大填充后,输出大小会变大。

当输出大小无法除尽时(结果是小数时),需要采取报错等对策。顺便说一下,根据深度学习的框架的不同,当值无法除尽时,有时会向最接近的整数四舍五入,不进行报错而继续运行。
- 三维数据的卷积运算
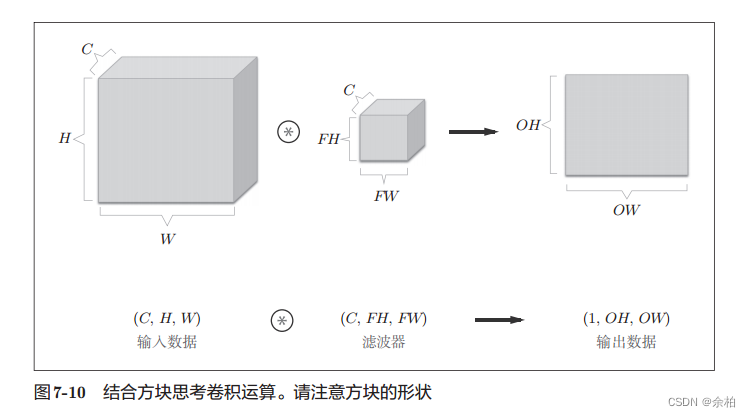 在这个例子中,数据输出是1张特征图(通道数为1的特征图)
在这个例子中,数据输出是1张特征图(通道数为1的特征图)

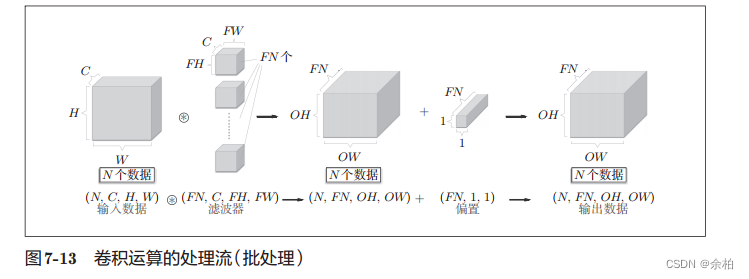
- 批处理
批处理版的数据流中,在各个数据的开头添加了批用的维度。像这样,数据作为4维的形状在各层间传递。
3.池化层
池化是缩小高、长方向上的空间的运算,提取特征图更好的特征。
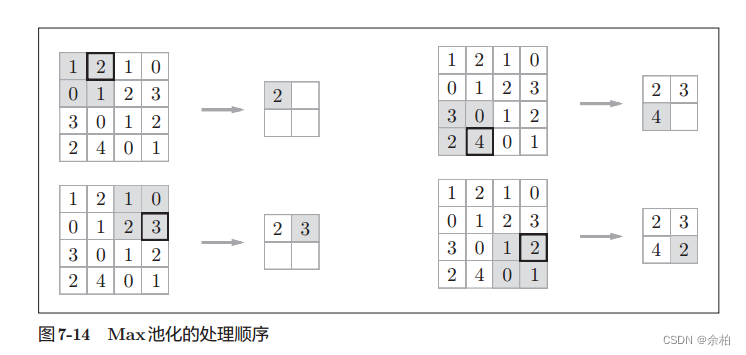
- max和average池化
- 特征
1.没有要学习的参数
2.通道数不发生变化
3.对微小的位置变化具有鲁棒性(健壮)
4.降低后续网络层的输入维度,所建模型大小,提高网络精度。
4.卷积层和池化层的实现
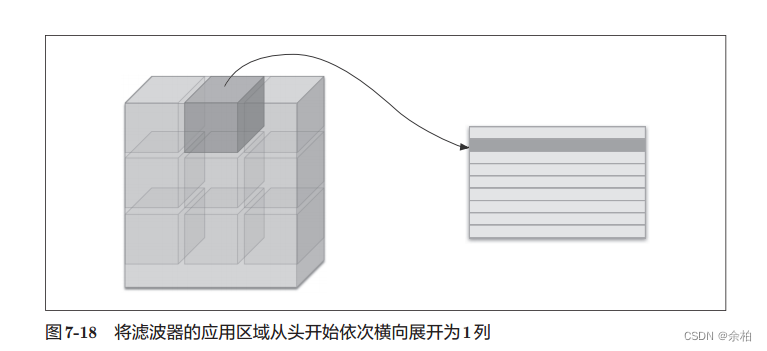
- im2col
im2col是一个函数,将输入数据展开以适合滤波器(权重)。
 缺点:使用im2col展开后元素个数会多于原方块的元素个数。存在比普通的实现消耗更多内存的缺点。
缺点:使用im2col展开后元素个数会多于原方块的元素个数。存在比普通的实现消耗更多内存的缺点。

- transpose
transpose会更改多维数组的轴的顺序。
- 池化层在通道方向上是独立的
池化层的实现和卷积层相同,都使用im2col展开输入数据。不过,池化的情况下,在通道方向上是独立的,这一点和卷积层不同。池化的应用区域按通道单独展开。

5.CNN的实现
 初始化
初始化
class SimpleConvNet:
def __init__(self, input_dim=(1, 28, 28),conv_param={'filter_num':30, 'filter_size':5, 'pad':0, 'stride':1},hidden_size=100, output_size=10, weight_init_std=0.01):
filter_num = conv_param['filter_num']#从超参字典提取
filter_size = conv_param['filter_size']
filter_pad = conv_param['pad']
filter_stride = conv_param['stride']
input_size = input_dim[1]
conv_output_size = (input_size - filter_size + 2*filter_pad) / filter_stride + 1
pool_output_size = int(filter_num * (conv_output_size/2) *(conv_output_size/2))
权重参数初始化
self.params = {}#将这些参数保存在实例变量的params字典中
self.params['W1'] = weight_init_std * np.random.randn(filter_num,input_dim[0],filter_size, filter_size)
self.params['b1'] =np.zeros(filter_num)
self.params['W2'] = weight_init_std * np.random.randn(pool_output_size,hidden_size)
self.params['b2'] =np.zeros(hidden_size)
self.params['W3'] = weight_init_std * np.random.randn(hidden_size,output_size)
self.params['b3'] =np.zeros(output_size)
生成层
self.layers = OrderedDict()
self.layers['Conv1'] = Convolution(self.params['W1'],self.params['b1'],conv_param['stride'],conv_param['pad'])
self.layers['Relu1'] = Relu()
self.layers['Pool1'] =Pooling(pool_h=2, pool_w=2, stride=2)
self.layers['Affine1'] =Affine(self.params['W2'],self.params['b2'])
self.layers['Relu2'] = Relu()
self.layers['Affine2'] =Affine(self.params['W3'],self.params['b3'])
self.last_layer = softmaxwithloss()
推理和求损失函数
def predict(self, x):
for layer in self.layers.values():
x = layer.forward(x)
return x
def loss(self, x, t):
y = self.predict(x)
return self.lastLayer.forward(y, t)
误差反向传播法求梯度
def gradient(self, x, t):
# forward
self.loss(x, t)
# backward
dout = 1
dout = self.lastLayer.backward(dout)
layers = list(self.layers.values())
layers.reverse()
for layer in layers:
dout = layer.backward(dout)
# 设定
grads = {}
grads['W1'] = self.layers['Conv1'].dW
grads['b1'] = self.layers['Conv1'].db
grads['W2'] = self.layers['Affine1'].dW
grads['b2'] = self.layers['Affine1'].db
grads['W3'] = self.layers['Affine2'].dW
grads['b3'] = self.layers['Affine2'].db
return grads
6.CNN可视化
- 第 1层权重的可视化
卷积层的滤波器会提取边缘或斑块等原始信息 - 基于分层结构的信息提取

7.常见CNN
- LeNet

- AlexNet
















 691
691











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









