







1 矢量分解
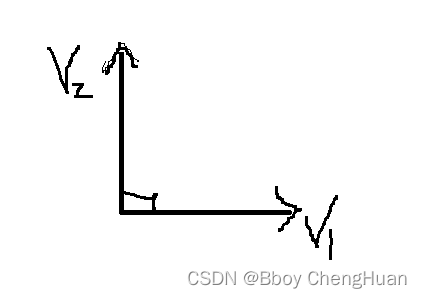
我们知道两个矢量
V
2
→
a
n
d
V
1
→
相互正交,夹角为
90
°
我们知道两个矢量\overrightarrow{V_2}and\overrightarrow{V_1}相互正交,夹角为90\degree
我们知道两个矢量V2andV1相互正交,夹角为90°
即
V
2
→
⋅
V
1
→
=
∣
V
1
∣
⋅
∣
V
2
∣
c
o
s
90
°
=
0
\overrightarrow{V_2} \cdot\overrightarrow{V_1}=\left| V_1\right|\cdot\left|V_2\right|cos90\degree=0
V2⋅V1=∣V1∣⋅∣V2∣cos90°=0
在这个平面坐标上可以对任意方向的信号进行二维分解
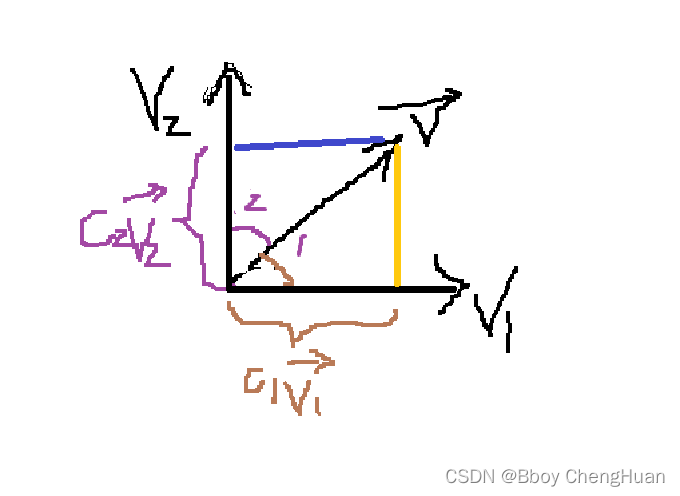
如上图我们对V进行分解即使用V1和V2表示出来
V
→
=
c
1
V
→
2
+
c
2
V
→
2
\overrightarrow V=c_1\overrightarrow V_2+c_2\overrightarrow V_2
V=c1V2+c2V2
其中
c
1
=
∣
V
→
∣
c
o
s
θ
1
∣
V
→
1
∣
=
V
→
⋅
V
→
1
V
→
1
⋅
V
→
1
c_1=\frac{\left|\overrightarrow V\right|cos\theta_1}{\left|\overrightarrow V_1\right|}=\frac{\overrightarrow V \cdot \overrightarrow V_1}{\overrightarrow V_1 \cdot \overrightarrow V_1}
c1=
V1
V
cosθ1=V1⋅V1V⋅V1
c
2
=
∣
V
→
∣
c
o
s
θ
2
∣
V
→
2
∣
=
V
→
⋅
V
→
2
V
→
2
⋅
V
→
2
c_2=\frac{\left|\overrightarrow V\right|cos\theta_2}{\left|\overrightarrow V_2\right|}=\frac{\overrightarrow V \cdot \overrightarrow V_2}{\overrightarrow V_2 \cdot \overrightarrow V_2}
c2=
V2
V
cosθ2=V2⋅V2V⋅V2
同理我们对于三维向量进行分解
V
→
=
c
1
V
→
2
+
c
2
V
→
2
+
c
3
V
→
3
\overrightarrow V=c_1\overrightarrow V_2+c_2\overrightarrow V_2+c_3\overrightarrow V_3
V=c1V2+c2V2+c3V3
其中
c
1
=
∣
V
→
∣
c
o
s
θ
1
∣
V
→
1
∣
=
V
→
⋅
V
→
1
V
→
1
⋅
V
→
1
c_1=\frac{\left|\overrightarrow V\right|cos\theta_1}{\left|\overrightarrow V_1\right|}=\frac{\overrightarrow V \cdot \overrightarrow V_1}{\overrightarrow V_1 \cdot \overrightarrow V_1}
c1=
V1
V
cosθ1=V1⋅V1V⋅V1
c
2
=
∣
V
→
∣
c
o
s
θ
2
∣
V
→
2
∣
=
V
→
⋅
V
→
2
V
→
2
⋅
V
→
2
c_2=\frac{\left|\overrightarrow V\right|cos\theta_2}{\left|\overrightarrow V_2\right|}=\frac{\overrightarrow V \cdot \overrightarrow V_2}{\overrightarrow V_2 \cdot \overrightarrow V_2}
c2=
V2
V
cosθ2=V2⋅V2V⋅V2
c
3
=
∣
V
→
∣
c
o
s
θ
3
∣
V
→
3
∣
=
V
→
⋅
V
→
3
V
→
3
⋅
V
→
3
c_3=\frac{\left|\overrightarrow V\right|cos\theta_3}{\left|\overrightarrow V_3\right|}=\frac{\overrightarrow V \cdot \overrightarrow V_3}{\overrightarrow V_3 \cdot \overrightarrow V_3}
c3=
V3
V
cosθ3=V3⋅V3V⋅V3
由低维推广至高维,我们可以知道n维空间的任意矢量V,可以准确表示为n个正交矢量的线性组合,即:
V
→
=
c
1
V
→
2
+
c
2
V
→
2
+
⋯
+
c
n
V
→
n
\overrightarrow V=c_1\overrightarrow V_2+c_2\overrightarrow V_2+\cdots+c_n\overrightarrow V_n
V=c1V2+c2V2+⋯+cnVn
其中任意
c
r
=
V
→
⋅
V
→
r
V
→
r
⋅
V
→
r
c_r=\frac{\overrightarrow V \cdot \overrightarrow V_r}{\overrightarrow V_r \cdot \overrightarrow V_r}
cr=Vr⋅VrV⋅Vr
V
→
i
⋅
V
→
j
=
0
(
i
≠
j
)
\overrightarrow V_i \cdot \overrightarrow V_j=0(i\ne j)
Vi⋅Vj=0(i=j)
我们可以将这种矢量分解的思想推广至信号分解中。
2 信号分解
信号正交:在(
t
1
t_1
t1,
t
2
t_2
t2)区间的两个函数
φ
1
(
t
)
\varphi_1(t)
φ1(t)和
φ
2
(
t
)
\varphi_2(t)
φ2(t)满足
∫
t
1
t
2
φ
1
(
t
)
φ
2
(
t
)
∗
d
t
=
0
\int_{t_1}^{t_2}\varphi_1(t)\varphi_2(t)^*\mathrm{d}t=0
∫t1t2φ1(t)φ2(t)∗dt=0(信号卷积为0),则称
φ
1
(
t
)
\varphi_1(t)
φ1(t)和
φ
2
(
t
)
\varphi_2(t)
φ2(t)在该区间内正交。
对于已知信号的分解我们需要先找到一个正交函数集(即映射的平面坐标轴,于多个函数而言在(
t
1
t_1
t1,
t
2
t_2
t2)区间的n个函数
φ
1
(
t
),
φ
2
(
t
),
⋯
,
φ
n
(
t
)
\varphi_1(t),\varphi_2(t),\cdots,\varphi_n(t)
φ1(t),φ2(t),⋯,φn(t)满足
∫
t
1
t
2
φ
i
(
t
)
φ
j
(
t
)
∗
d
t
=
0
(
i
≠
j
)
\int_{t_1}^{t_2}\varphi_i(t)\varphi_j(t)^*\mathrm{d}t=0(i\ne j)
∫t1t2φi(t)φj(t)∗dt=0(i=j),则称该函数集在该区间内正交。
另外信号的分解更加苛刻一点,需要完备正交函数集即在正交函数集外,不存在任何函数
φ
(
t
)
\varphi(t)
φ(t)满足
∫
t
1
t
2
φ
(
t
)
φ
j
(
t
)
∗
d
t
=
0
(
φ
j
取自正交函数集)
\int_{t_1}^{t_2}\varphi(t)\varphi_j(t)^*\mathrm{d}t=0( \varphi_j取自正交函数集)
∫t1t2φ(t)φj(t)∗dt=0(φj取自正交函数集)
则该正交函数集便升级为完备正交函数集
恰好有两个典型的完备正交函数集在区间
(
t
0
,
t
0
+
T
)
(t_0,t_0+T)
(t0,t0+T)
(1)三角函数集{
1
,
c
o
s
(
n
Ω
t
)
,
s
i
n
(
n
Ω
t
)
,
n
=
1
,
2
,
⋯
1,cos(n\Omega t),sin(n\Omega t),n=1,2,\cdots
1,cos(nΩt),sin(nΩt),n=1,2,⋯}
(2)虚指数函数集{
e
j
n
Ω
t
,
n
=
0
,
±
1
,
±
2
,
⋯
e^{jn\Omega t},n=0,\pm1,\pm2,\cdots
ejnΩt,n=0,±1,±2,⋯}
可自行进行证明,傅里叶已证实
接下来我梦使用信号正交分解

为了求解
f
(
t
)
f(t)
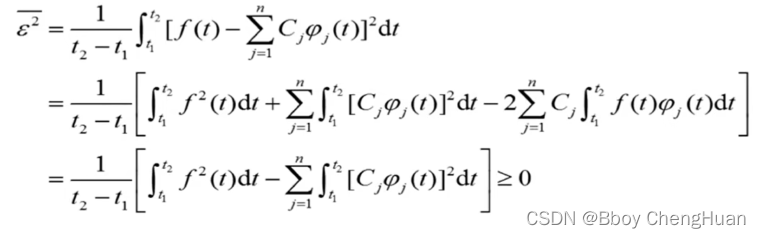
f(t)与我们近似函数之间误差最小,引入一个均方误差函数
ε
2
‾
=
1
t
2
−
t
1
∫
t
1
t
2
[
f
(
t
)
−
∑
j
=
1
n
C
j
φ
j
(
t
)
]
2
d
t
\overline{ \varepsilon^2}=\frac{1}{t_2-t_1}\int_{t_1} ^{t_2}[f(t)-\sum_{j=1}^nC_j\varphi_j(t)]^2\mathrm{d}t
ε2=t2−t11∫t1t2[f(t)−j=1∑nCjφj(t)]2dt
对其求
C
i
C_i
Ci偏导,并令其等于0
∂
ε
2
‾
∂
C
i
=
∂
∫
t
1
t
2
[
f
(
t
)
−
∑
j
=
1
n
C
j
φ
j
(
t
)
]
2
d
t
∂
C
i
\frac { \partial \overline{ \varepsilon^2}}{ \partial C_i}=\frac{\partial{\int_{t_1} ^{t_2}[f(t)-\sum_{j=1}^nC_j\varphi_j(t)]^2\mathrm{d}t}}{ \partial C_i}
∂Ci∂ε2=∂Ci∂∫t1t2[f(t)−∑j=1nCjφj(t)]2dt
对于求和项而言两两正交所以只留下
C
i
2
φ
i
2
C_i^2\varphi_i^2
Ci2φi2,展开被积积分,并求导,只有两项不为0即
−
2
∫
t
1
t
2
f
(
t
)
φ
i
(
t
)
d
t
+
2
C
i
∫
t
1
t
2
φ
i
2
(
t
)
d
t
=
0
-2\int_{t_1} ^{t_2}f(t)\varphi_i(t)\mathrm{d}t+2C_i\int_{t_1} ^{t_2}\varphi_i^2(t)\mathrm{d}t=0
−2∫t1t2f(t)φi(t)dt+2Ci∫t1t2φi2(t)dt=0
即
C
i
=
∫
t
1
t
2
f
(
t
)
φ
i
(
t
)
d
t
∫
t
1
t
2
φ
i
2
(
t
)
d
t
=
1
K
∫
t
1
t
2
f
(
t
)
φ
i
(
t
)
d
t
C_i=\frac{\int_{t_1} ^{t_2}f(t)\varphi_i(t)\mathrm{d}t}{\int_{t_1} ^{t_2}\varphi_i^2(t)\mathrm{d}t}=\frac{1}{K}\int_{t_1} ^{t_2}f(t)\varphi_i(t)\mathrm{d}t
Ci=∫t1t2φi2(t)dt∫t1t2f(t)φi(t)dt=K1∫t1t2f(t)φi(t)dt
回代:
可知取得项数越多即n越大,均方误差越小。当
n
→
∞
n \to \infty
n→∞时,均方误差为0
3 结论
任意信号可以表示为无穷个正交函数之和即:
f
(
t
)
=
C
1
φ
1
(
t
)
+
C
2
φ
2
(
t
)
+
⋯
+
C
n
φ
n
(
t
)
=
∑
i
=
1
∞
C
i
φ
(
t
)
f(t)=C_1\varphi_1(t)+C_2\varphi_2(t)+\cdots+C_n\varphi_n(t)=\sum_{i=1}^\infty C_i\varphi(t)
f(t)=C1φ1(t)+C2φ2(t)+⋯+Cnφn(t)=i=1∑∞Ciφ(t)
也可称为正交展开式,或者广义傅里叶级数。
因此任意信号可以使用正弦完备正交函数集来表示
参考视频讲解:















 5638
5638











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









