




发那科机器人(机器人基本指令)
一、机器人基本指令
1、动作指令
课程内容:
动作指令
课程目标:
学会使用机器人动作指令
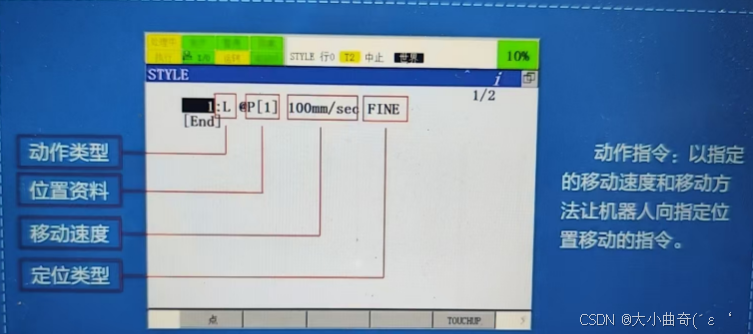
动作指令是指以指定的移动速度和移动方法,使机器人向作业空间内的指定位置移动的指令。动作指令主要包括4个部分,分为动作类型、位置资料、移动速度以及定位类型;
1.1、动作类型:
机器人的动作类型一般分为四种,关节动作、直线动作、圆弧动作以及C圆弧动作。
①关节动作(J)
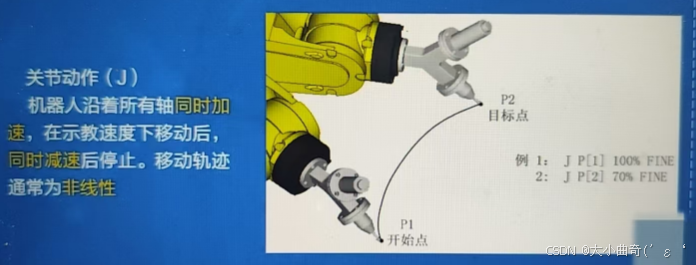
关节动作是将机器人移动到指定位置的基本移动方法,机器人所有轴同时加速,在示教速度下移动后同时减速停止,移动轨迹通常为非直线,在对结束点进行示教时记录动作类型;
②直线动作(L)
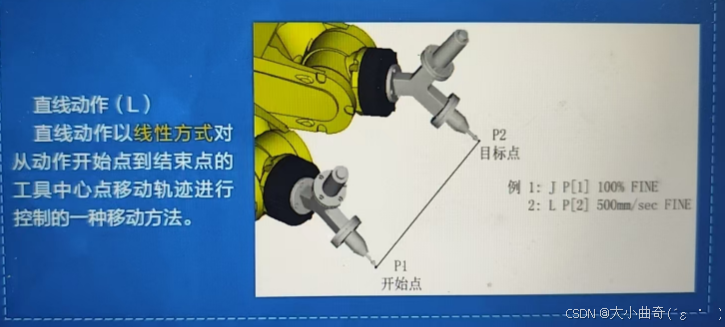
直线动作:是将所选定的机器人工具中心点TCP从轨迹开始点运动到目标点的运动类型,它是一种以线性运动方式从动作开始点到结束点移动的一种移动方法。
③圆弧动作(C)
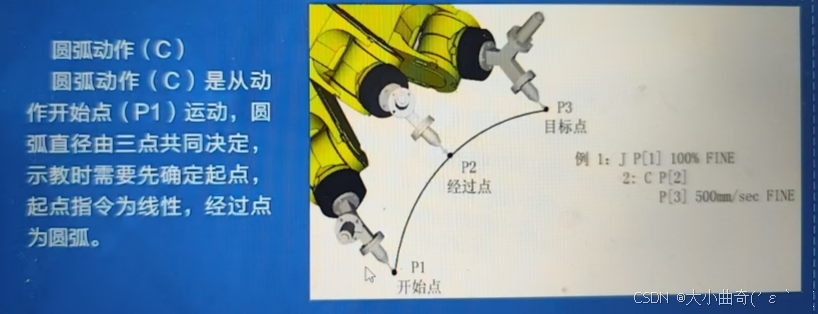
圆弧动作是从动作开始点通过经过点再到目标点,以圆弧方式对工具中心点移动轨迹进行控制的一种移动方法。它在一个指令中,对经过点以及目标点进行示教;
圆弧动作指令下,需要在一行中示教两个位置,分别是经过点和目标点;
④C圆弧动作(A)
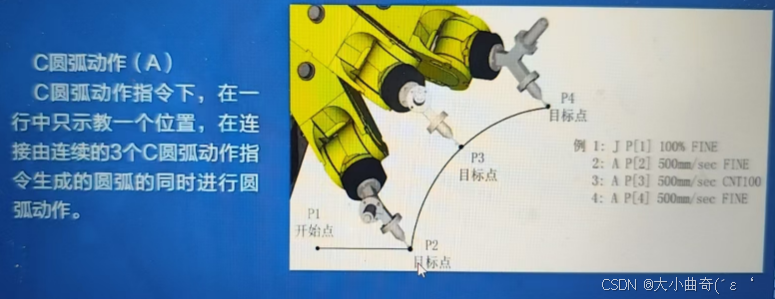
C圆弧动作指令:在一行中只示教一个位置,也就是说每一个点都有一个单独的动作指令。连续的三个圆弧动作指令,将使机器人按照三个示教的点位所形成的圆弧轨迹进行动作;
1.2、位置变量:
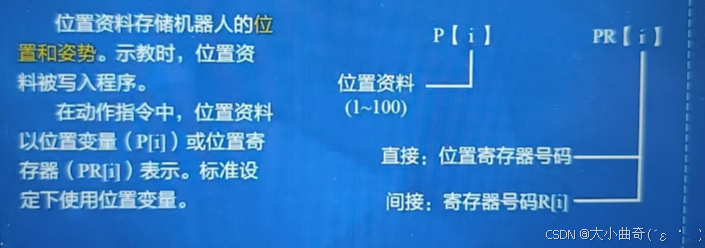
位置资料:用于存储机器人的位置和姿势。在对动作指令进行示教时,位置资料同时被写入程序。在动作指令中,位置 资料使用 位置变量P[i] 或 位置寄存器PR[i] 表示,标准设定下使用的是位置变量。
1.3、移动速度:
移动速度,动作类型为关节运动的情况下:
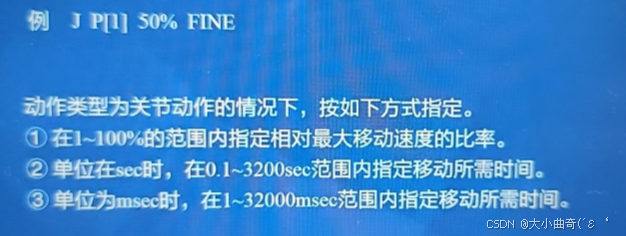
它有三种单位,分别是百分比,秒以及毫秒。这三个各代表什么意思?百分比表示在1%~100%的范围内,指定相对最大移动速度的比率。单位为秒时表示在0.1~3200秒范围内。指定移动所需时间;单位为毫秒时,在1~32000ms范围内指定移动所需时间。
移动速度,动作类型为直线动作、圆弧动作或者C圆弧动作的情况下:
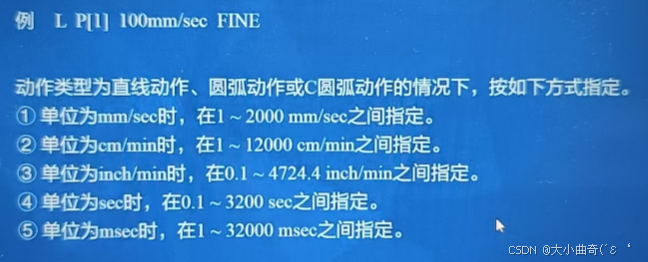
速度单位是如何指定的。它共分为五种,分别是毫米/每秒、厘米/分,英寸/分,秒以及毫秒,他们是如何定义的呢?
毫米/秒,它的意思是在1~2000mm/秒之间指定;
厘米/分,表示1~12000厘米/分之间指定;
英寸/分,代表在0.1~4724.4英寸/分之间指定;
单位为秒时,在0.1至3200秒之间指定;
单位为毫秒时,在1~32000毫秒之间指定;
移动速度:移动方法为在工具中心点附近的回转移动的情况:
它共有三种单位,单位分别是度/秒、秒以及毫秒;
我们主要来看一下度/秒,它的意思是指,在1~272°/秒之间指定。也就是说,它的速度范围是1~272°/秒;
1.4、定位类型:
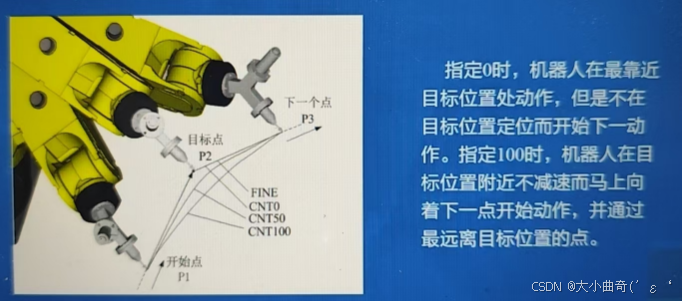
定位类型主要分为FINE和CNT两种类型
我们将定位类型设为CNT 0时,代表机器人在最靠近目标位置处动作,但是不在目标位置定位而开始下一动作;
我们将定位类型设为CNT 100时,机器人在目标位置附近不减速而马上向着下一点开始动作,并通过最远离目标位置的点;
FINE表示点到点之间的运动;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1951
1951

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









