







一、机器人编程基础
1、程序构成
什么是程序?
程序指的是由用户编写的一系列机器人指令以及其他附带信息构成,使机器人能够完成特定的作业任务。
程序除了记录机器人如何进行作业的程序信息外,还包括程序的属性等详细信息。
程序主要包括哪两部分:①程序预览画面,②程序编辑画面。
程序预览画面,我们按下示教器上面的SELECT键进入程序预览画面。然后会发现在该画面上方,有一个999688字节可用这样一个注释,这是存储器剩余容量。什么是存储器剩余容量呢:代表了当前设备所能存储的程序容量;
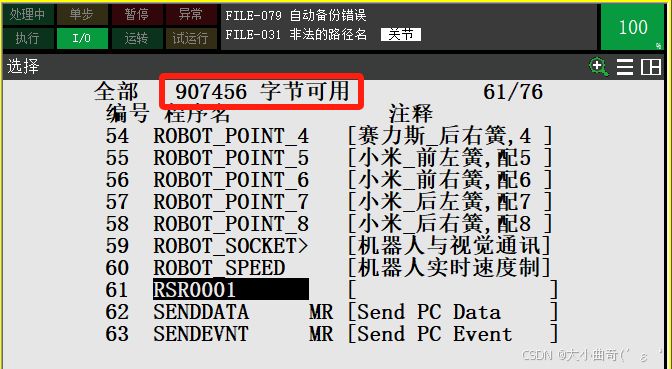
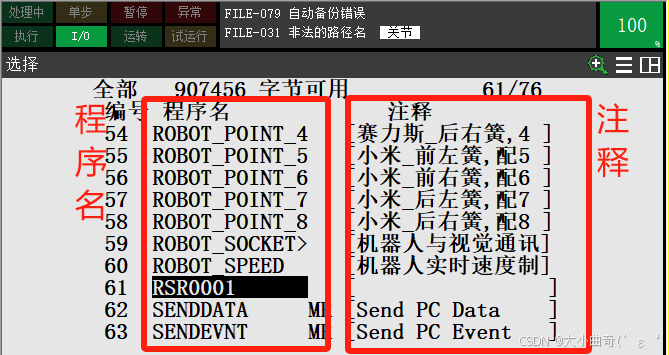
中间这一块区域,是程序名称,程序名称是用来区别存储在控制器内的程序,需要注意的是啊,我们相同的控制器内,只能创建不同名称的程序名(不能同名);
后面这一片区域是注释,注释是用来记述与程序相关的说明性附加信息,即我们在相应的程序后面进行注释,这样方便我们在后期查找对应的程序,以及对程序的属性有一个相应的了解。
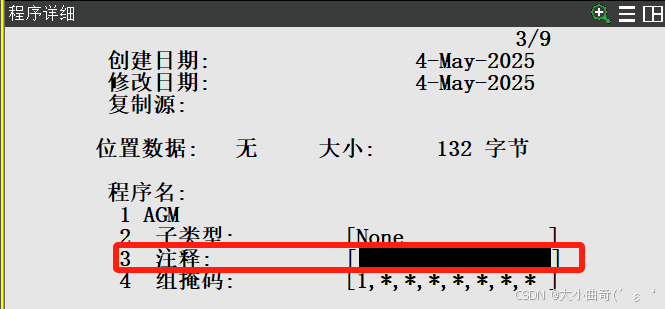
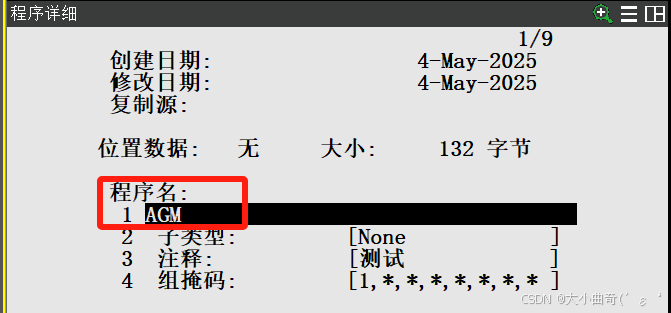
注释在哪边可以添加呢?我们以创建的程序
AGM为例说明。我们通过按下NEXT键切换功能键菜单,当出现复制、详细、载录等等功能的时候,我们按下F2键进入详细界面,我们移动光标至注释就可以编辑相应的注释。
除此之外呢,还有子类型,组掩码,写保护,忽略暂停,堆栈大小,集合等等。

如何修改程序的名称呢?比如创建了一个程序名称,发现不符合我们的要求,我们需要对程序名称进行相应的修改。如何修改呢?我们同样的按下NEXT键,切换功能键菜单,这里面有一个创建,删除,属性等等。
当出现功能键菜单出现详细的时候,我们同样的按下F2键,我们可以修改程序名称。
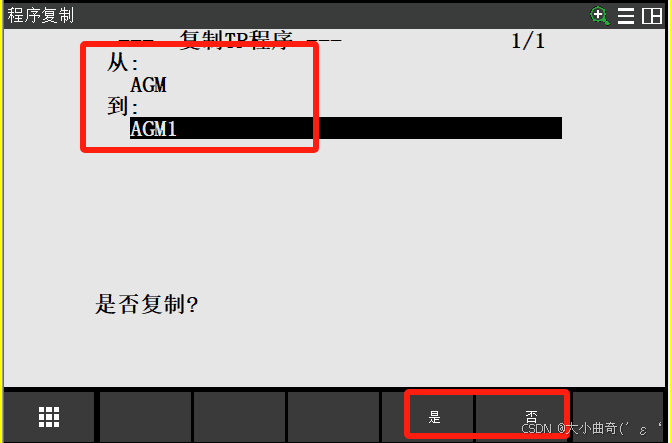
也可以通过按下F1键复制来复制该条程序。怎么复制呢?我们按下F1键,我们发现它会将当前这个名为ATM的一个程序复制到另一个程序,我们在这里需要输入一个程序的名称
程序的复制已经讲过,此处不再赘述。
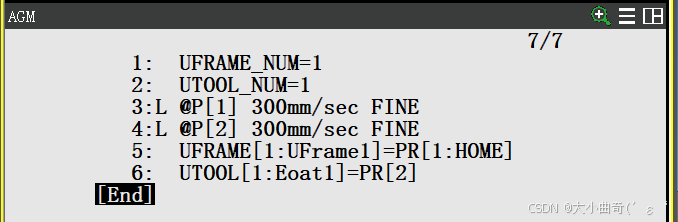
再来看一下程序编辑界面,我们选中AGM,按按下ENTER键,进入AGM的编辑界面。程序编辑界面里面有哪些东西呢?
左上方的这个
AGM,这是一个程序的名称,还有123456表示的是一个行号码,也就是指令的一个条数。中间三四两行,这个L P[1]和L P[2]这个指令,是动作指令;那么什么是动作指令呢?是以指定的移动速度和移动方法使机器人向作业空间内指定位置移动的指令,
那么第三行的这个是什么意思呢?就是以直线运动的形式移动到P[1]点,而且是以300mm/s的速度移动到P[1]点,最后来看一下程序末尾记号
END程序末尾记号的作用?是一个程序的结束标记,是表示本指令后面没有程序指令,也就是说我们不能在
END后面添加任何的指令。这就是程序的构成
2、程序创建
如何创建一个简单的程序名,以及对程序做一些简单的编辑。
首先,按下示教器上面的SELECT键(进入程序预览画面),然后按下F2创建(进入程序名创建界面)。
创建程序名有多种方法:
①选择单词类,我们可以按下F1键RSR。按下F1就会出现RSR这个单词;
②大写。然后按下F1键时对应是A,按两下对应是B,按三下对应C依次循环,
如何删除输入的错误的程序名?
按下删除键BACKSPACE,这样就能删除所输入的错误的程序名。以EDOBOT这个程序名为例,输入这个程序名
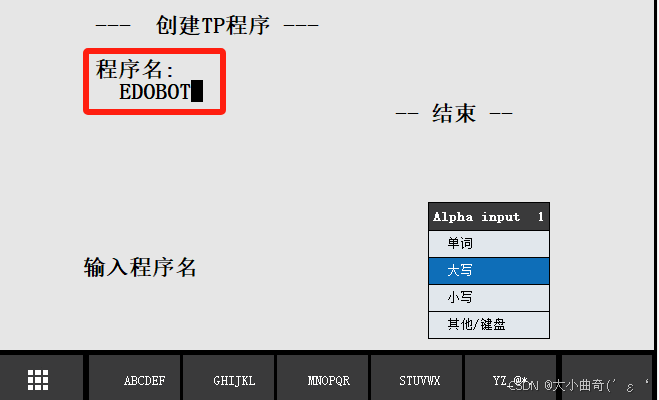
EDOBOT这个程序名就已创建好,程序名输入完成后,我们需要按一下enter键。
然后再下enter键就进入了EDOBOT这个程序的编辑界面:

下面编辑两个动作指令,按下F1键点,会弹出标准动作 1/1的界面,移动光标切换至所需的动作指令。
以关节动作指令为例,选择关节动作指令,按下ENTER键后,这时关节动作指令就已插入完成:
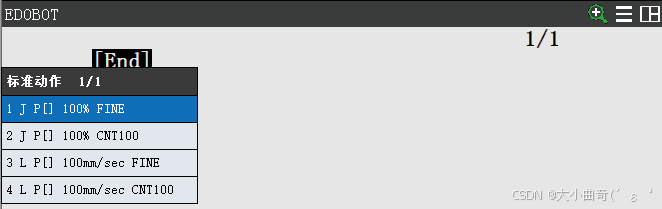
我也可以通过按下F1键点,会发现,如果我们在后续的编程当中需要用到很多的圆弧指令的话,而这个标准动作界面里面并没有圆弧指令:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









