







发那科机器人(基本操作、坐标系、I/O通信)
一,机器人基本操作
1,坐标系种类
学习目标:了解机器人的常用坐标系;
坐标系是为了确定机器人的位置和姿态而在机器人或空间上进行定义的位置指标系统;
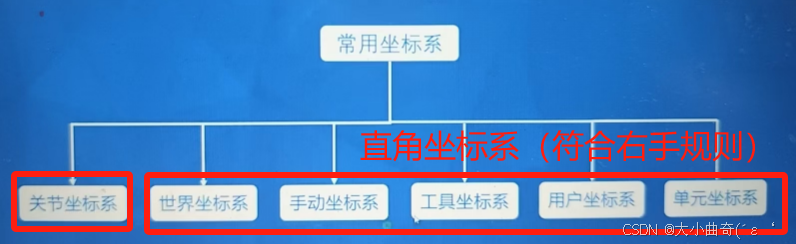
常用坐标系
- (非直角坐标系)关节坐标系
- (直角坐标系)世界坐标系,手动坐标系,工具坐标系,用户坐标系,单元坐标系
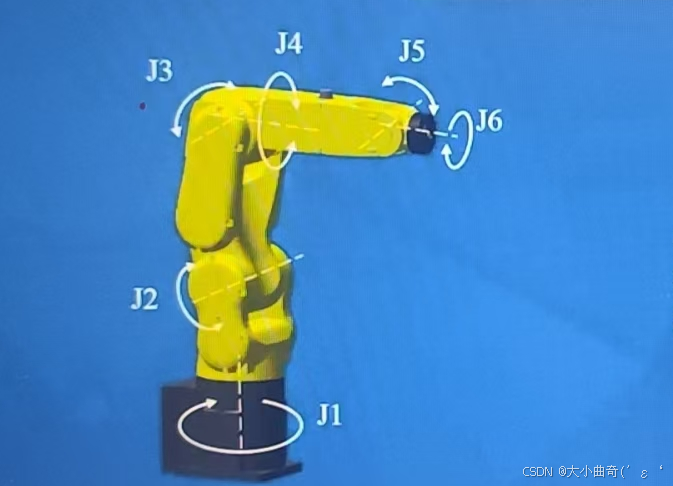
关节坐标系:
关节坐标系是设定在机器人的关节中的坐标系,其原点设置在机器人关节中心点处。
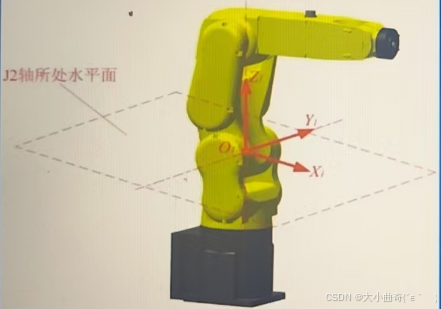
世界坐标系:
世界坐标系的原点位置一般定义在J2轴所处水平面与J1轴交点处:Z轴向上,X轴向前,Y轴按右手规则确定
用户坐标系,工具坐标系基于该坐标系下而设定;
用于位置数据的示教和执行;
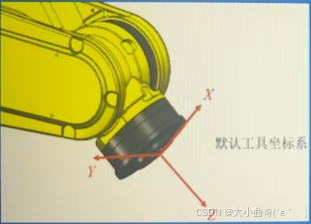
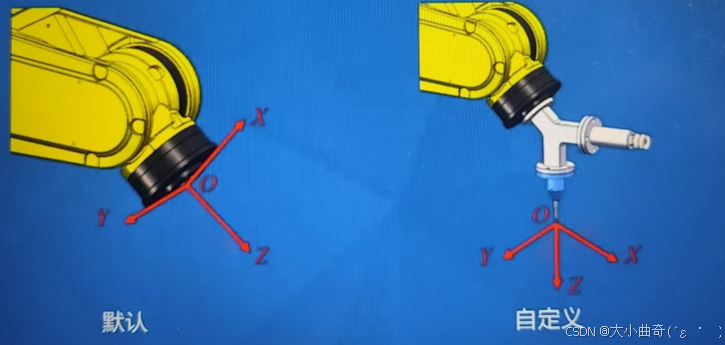
工具坐标系:
用来定义工具中心点的位置和工具姿态的坐标系。而工具中心点(ToolCenter Point,TCP)是机器人系统的控制点,出厂时默认于最后一个运动轴或连接法兰的中心。
用户坐标系:
用户坐标系是用户对每个作业空间进行定义的直角坐标系,用于位置寄存器的示教和执行,位置补偿指令的执行等,需要在编程前先进行自定义。如果未定义则与世界坐标系重合。在默认状态下,用户可以设置9个用户坐标系,

手动坐标系:
手动坐标系是在机器人作业空间中,为了方便有效地进行线性运动示教而定义的坐标系,在程序中不能被调用;
未定义时与世界坐标系重合;
单元坐标系:
单元坐标系在4D图形功能中使用,用来表示工作单元内的机器人位置;
主要用于多台机器人示教时使用;
通过设置单元坐标系就可以表达多台机器人之间的先对位置关系;
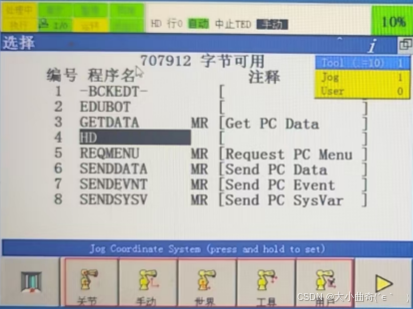
如何切换坐标系:
通过按下示教器上“
SHIFT”键+“COORD”键,可以切换坐标系种类(该操作还可以切换工具坐标与用户坐标的编号)。
也可在任意画面直接按“COORD”键依次切换
2,机器人手动操作一关节运动
控制器上模式选择切换到T1模式;
将示教器旋钮达到ON;
按“COORD”键,将坐标系切换到关节;
消除掉相应的报警(左手半按示教器安全开关,同时点击RESET键);
通过+%与-%调节速度倍率;
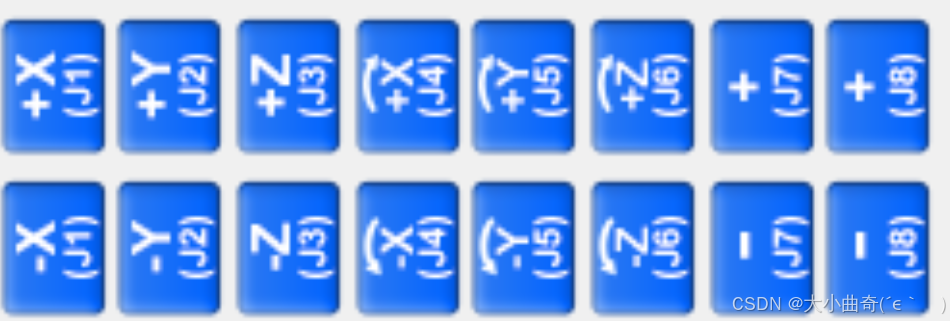
通过以下按钮可以实现六个轴的正负向运动
3,机器人手动操作一直角运动
机器人在直角坐标系下的运动时线性运动,是机器人多轴联动的效果;
控制器上模式选择切换到T1模式;
将示教器旋钮达到ON;
按“COORD”键,将坐标系切换到世界;
消除掉相应的报警(左手半按示教器安全开关,同时点击RESET键);
通过+%与-%调节速度倍率;
(左手半按示教器安全开关,按SHIFT,及X,Y,Z按键)通过以下按钮可以实现直角坐标运动;
注:机器人在直角坐标系中运动时可能出现奇异点,为什么?
状态窗口显示“在奇异点附近”报警信息;
通常是四轴轴线与六轴轴线平行时出现的;
遇到上述情况如何做:
- 首先复位报警信号,再将坐标系切换至关节,利用关节运动将机器人移动到一个比较安全的姿态;然后再将坐标系切换至世界,将机器人移动到所=需要达到的位置即可;
二,坐标系建立
1,工具坐标系建立原理及验证方法
课程内容
工具坐标系的建立原理
工具坐标系验证方法
课程目标:
了解工具坐标系的建立原理
学会如何验证工具坐标系
工具坐标系的建立原理
定义:工具坐标系是表示工具中心和工具姿势的直角坐标系,需要在编程前先进行自定义。未定义工具坐标系时,将被默认工具坐标系所取代。
设定方法
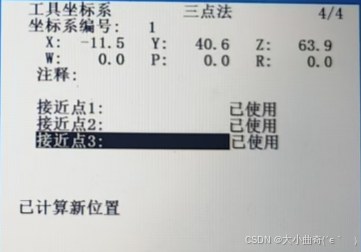
1 三点法(常用) 2 六点法(XY)(常用) 3 六点法(XZ)(常用)
4 两点+Z 5 四点法 6 直接输入法
三点法:需要接近点1,接近点2,接近点3;
六点法:是在三点法的基础上,新增了坐标原点,,X方向点,Y方向点;
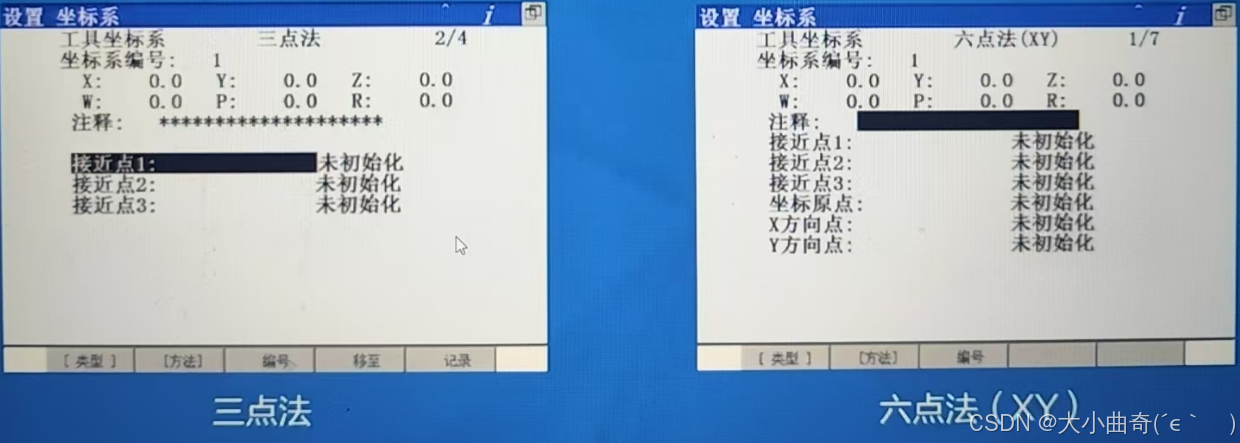
三点示教法:
三点法示教,只可以设定工具中心点,无法设定工具姿势。
示教时为了正确设定坐标系,应尽量使三个趋近方向各不相同(这样设定好的坐标系精度相对要高一点)。
按SHIFT+F5记录三个接近点,当三个接近点都记录好后,系统会自动计算工具中心点;

六点示教法(XY):
与三点法一样的设定工具中心点,然后设定工具姿势。设定工具姿势时使用直角坐标系进行示教,保持工具姿势不变
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1138
1138

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









