







一、基于 CW 方程的卫星动力学原理
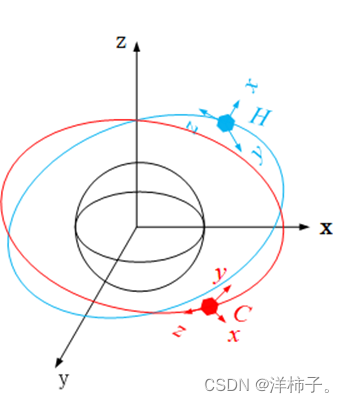
为描述己方卫星与敌方卫星之间的运动和相对运动,引入三个坐标系。在空间动力学研究中,惯性坐标系 N N N,也被称作地心赤道惯性坐标系,是一个以地球质心为原点的参考框架,其中 X X X轴指向春分点, Z Z Z轴垂直于赤道平面指向北极方向,而 Y Y Y轴则按右手法则垂直于 X X X轴和 Z Z Z轴确定。参考卫星轨道坐标系(记为 C C C)的原点同样位于参考卫星的质心,其 x x x轴指向从地心到参考卫星的位置矢量, y y y轴在参考卫星轨道平面内并与 x x x轴垂直,指向参考卫星运动的前方, z z z轴则垂直于轨道平面,与 x x x轴和 y y y轴构成右手坐标系。
基本假设包括:地球被视为均质的中心引力场球体,地球和卫星均被简化为质点,且敌方卫星不进行主动控制。这些假设有助于简化问题并使得动力学分析更为可行。
因为惯性坐标系下的位置速度信息都较大(1e7 米起)不利于项目展示或算法计算,因此在参考卫星坐标系中建立相对运动模型(1e5 米起),以方便展示与算法计算。简化后的 C-W 方程如下(简化条件需要自行阅读论文):
{ x ¨ − 2 n y ˙ − 3 n 2 x = a x y ¨ + 2 n x ˙ = a y z ¨ + n 2 z = a z \left\{ \begin{array}{l} \ddot{x}-2n\dot{y}-3n^2x=a_x\\ \ddot{y}+2n\dot{x}=a_y\\ \ddot{z}+n^2z=a_z\\ \end{array} \right. ⎩ ⎨ ⎧x¨−2ny˙−3n2x=axy¨+2nx˙=ayz¨+n2z=az
若我们将此参考卫星作为原点,此 C-W 方程则表示的是卫星在参考卫星坐标系下相对于参考卫星的位置,但因为参考卫星为原点因此此公式计算的位置、速度和加速度均为参考卫星坐标系下的绝对位置和状态。其中 n n n为参考卫星的平均角速度计算方法如下:
n = μ r 3 n=\sqrt{\frac{\mu}{r^3}} n=r3μ
其中 μ \mu μ为地球引力常数, r r r为参考卫星轨道半径, a x 、 a y 、 a z a_x、a_y、a_z ax、ay、az为对卫星产生的控制加速度。
根据状态转移方程求解能够得到以下公式和矩阵(如有不对请参考代码):
X i ( t ) = ϕ ( τ ) X i ( t 0 ) + Ψ ( τ ) a
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2887
2887

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









