







一、任务创建和删除的API函数
任务创建和删除的本质就是调用FreeRTOS的API函数
| API函数 | 描述 |
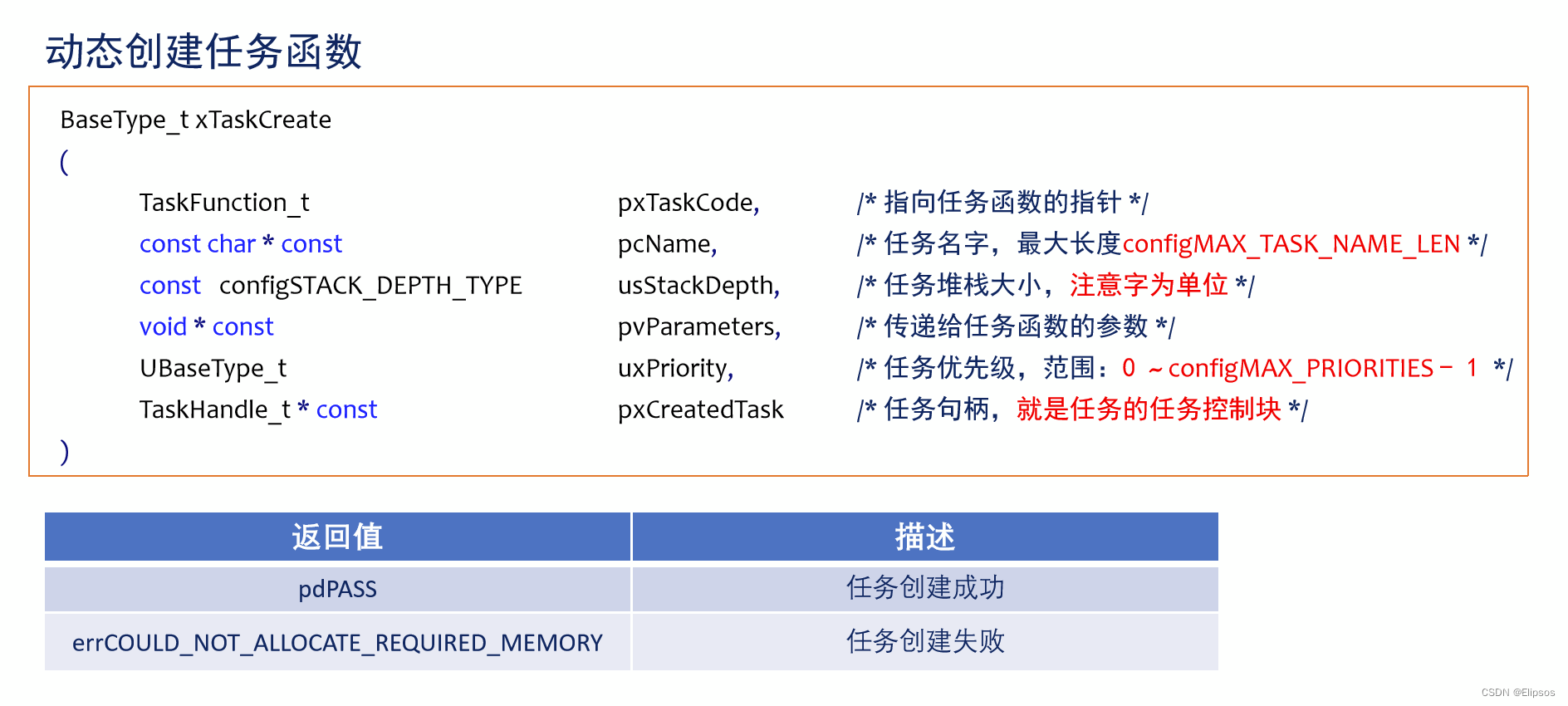
| xTaskCreate() | 动态方式创建任务 |
| xTaskCreateStatic() | 静态方式创建任务 |
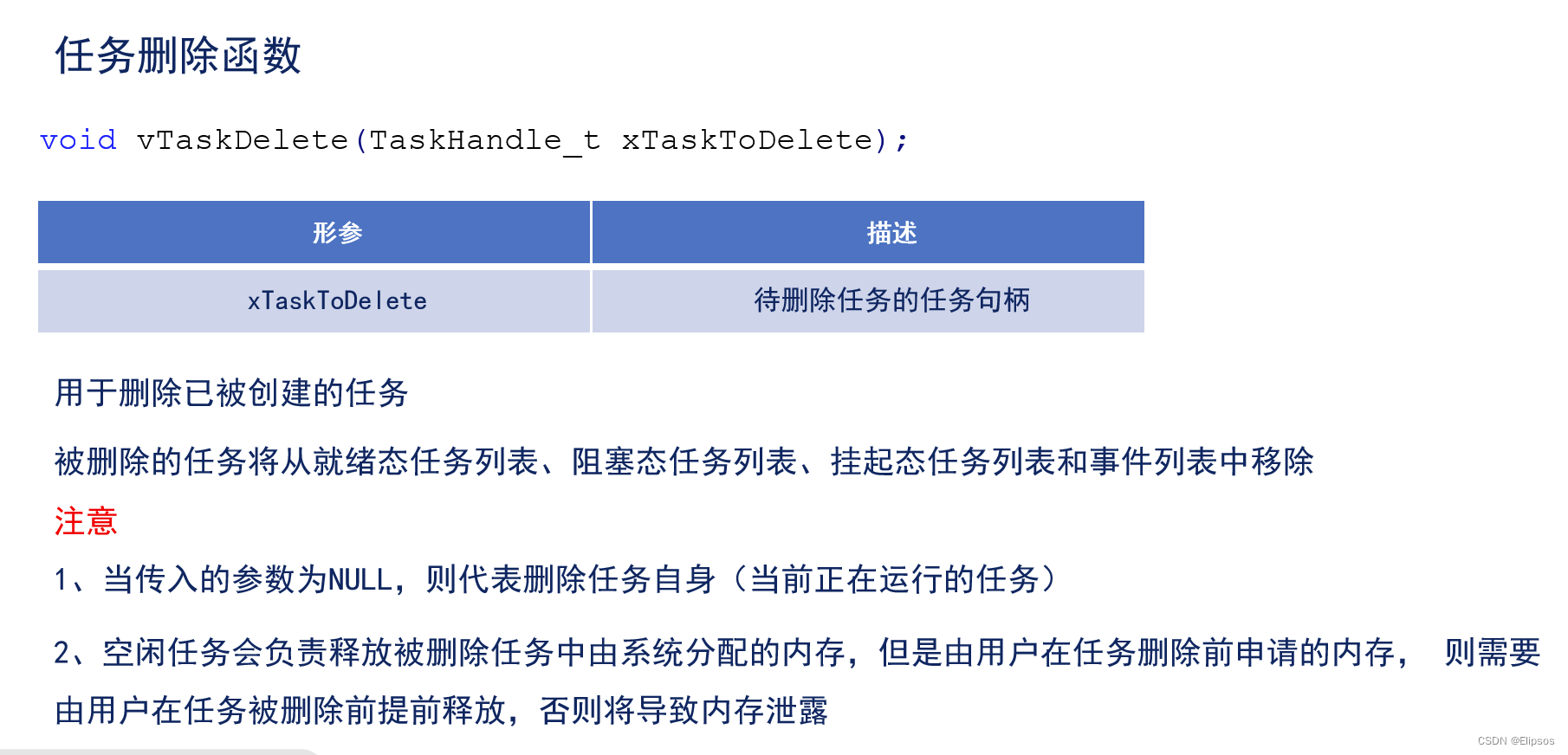
| vTaskDelete() | 删除任务 |
动态创建任务:任务的任务控制块以及任务的栈空间所需内存,均由FreeRTOS从FreeRTOS管理的堆中分配
静态创建任务:任务的任务控制块以及任务的栈空间所需内存,需要用户分配提供



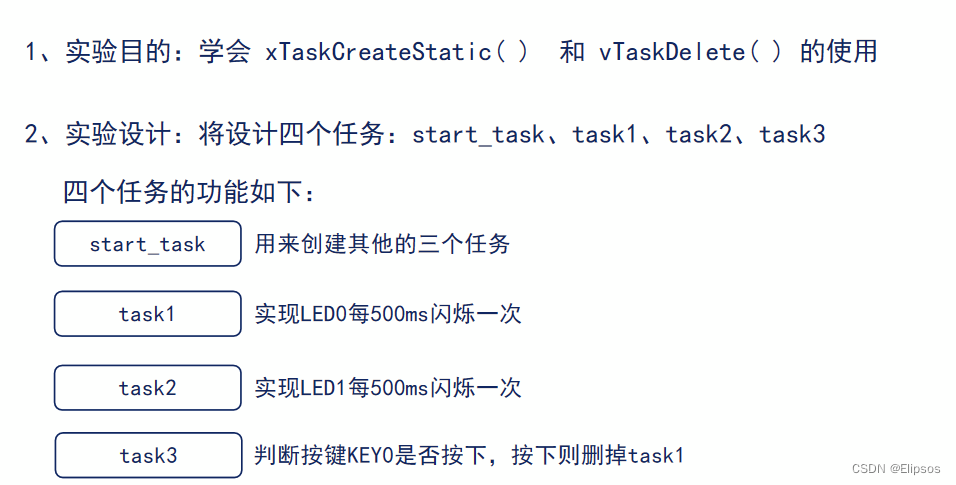
二、任务的创建和删除(动态方法)
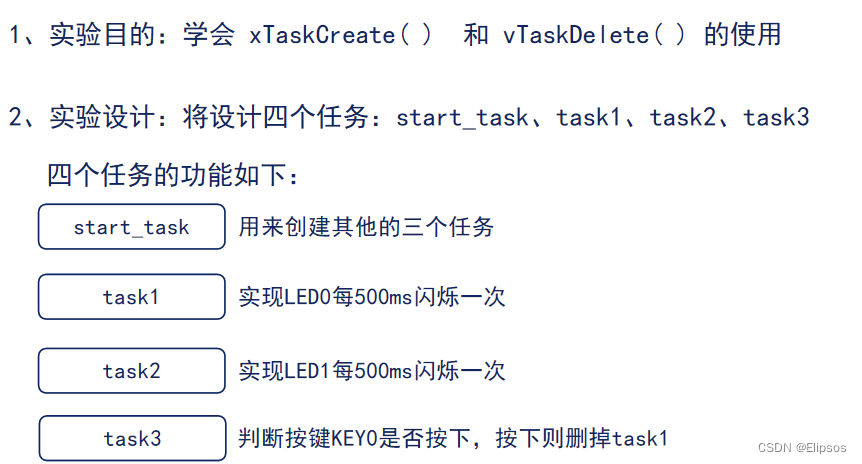
//任务1:配置,包括任务句柄 任务优先级 堆栈大小 创建任务
#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;//任务句柄
void start_task( void * pvParameters );
#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 128
TaskHandle_t task1_handler;
void task1( void * pvParameters );
#define TASK2_PRIO 3
#define TASK2_STACK_SIZE 128
TaskHandle_t task2_handler;
void task2( void * pvParameters );
#define TASK3_PRIO 4
#define TASK3_STACK_SIZE 128
TaskHandle_t task3_handler;
void task3( void * pvParameters );
void freertos_demo(void)
{
xTaskCreate((TaskFunction_t ) start_task,
(char * ) "start_task",
(configSTACK_DEPTH_TYPE ) START_TASK_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) START_TASK_PRIO,
(TaskHandle_t * ) &start_task_handler );
vTaskStartScheduler();//开启任务调度计
}
//强制类型转换:防止报错
void start_task( void * pvParameters )
{
taskENTER_CRITICAL();//进入临界区
xTaskCreate((TaskFunction_t ) task1,
(char * ) "task1",
(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK1_PRIO,
(TaskHandle_t * ) &task1_handler );
xTaskCreate((TaskFunction_t ) task2,
(char * ) "task2",
(configSTACK_DEPTH_TYPE ) TASK2_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK2_PRIO,
(TaskHandle_t * ) &task2_handler );
xTaskCreate((TaskFunction_t ) task3,
(char * ) "task3",
(configSTACK_DEPTH_TYPE ) TASK3_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK3_PRIO,
(TaskHandle_t * ) &task3_handler );
vTaskDelete(NULL);
taskEXIT_CRITICAL();//退出临界区 ,才开始任务调度
}
void task1( void * pvParameters )
{
while(1)
{
printf("task1ֽ正在运行!!!\r\n");
LED0_TOGGLE();
vTaskDelay(500);
}
}
void task2( void * pvParameters )
{
while(1)
{
printf("task2ֽ正在运行!!!\r\n");
LED1_TOGGLE();
vTaskDelay(500);
}
}
void task3( void * pvParameters )
{
uint8_t key = 0;
while(1)
{
printf("task3正在运行!!!\r\n");
key = key_scan(0);
if(key == KEY0_PRES)
{
if(task1_handler != NULL)
{
printf("删除task1任务\r\n");
vTaskDelete(task1_handler);
task1_handler = NULL;
}
}
vTaskDelay(10);
}
}
其中如何设置堆栈大小(#define START_TASK_STACK_SIZE )可以使用API函数 :INCLUDE_uxTaskGetStackHighWaterMark——获取任务堆栈历史剩余最小值来确定。
在taskENTER_CRITICAL()函数未添加前,程序先按顺序依次又Task1到3运行并判断优先级最后执行优先级最高任务,而不是直接执行优先级最高任务,保护不想被打断的程序段。
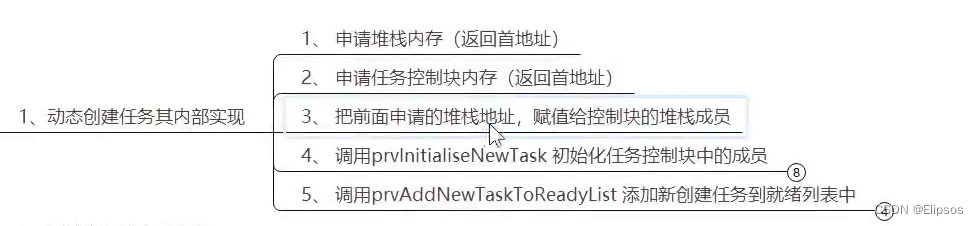
三、实现创建和删除的详细过程
#if ( portSTACK_GROWTH > 0 )//判断栈的生长方向,>0向上

task.c
typedef struct tskTaskControlBlock //任务控制块:保存任务的特征和信息
{
...
ListItem_t xStateListItem;//状态列表项
ListItem_t xEventListItem;//事件列表项
UBaseType_t uxPriority;//任务优先级
StackType_t * pxStack;//任务堆栈首地址
char pcTaskName[ configMAX_TASK_NAME_LEN ]; //存放的位置
...
}
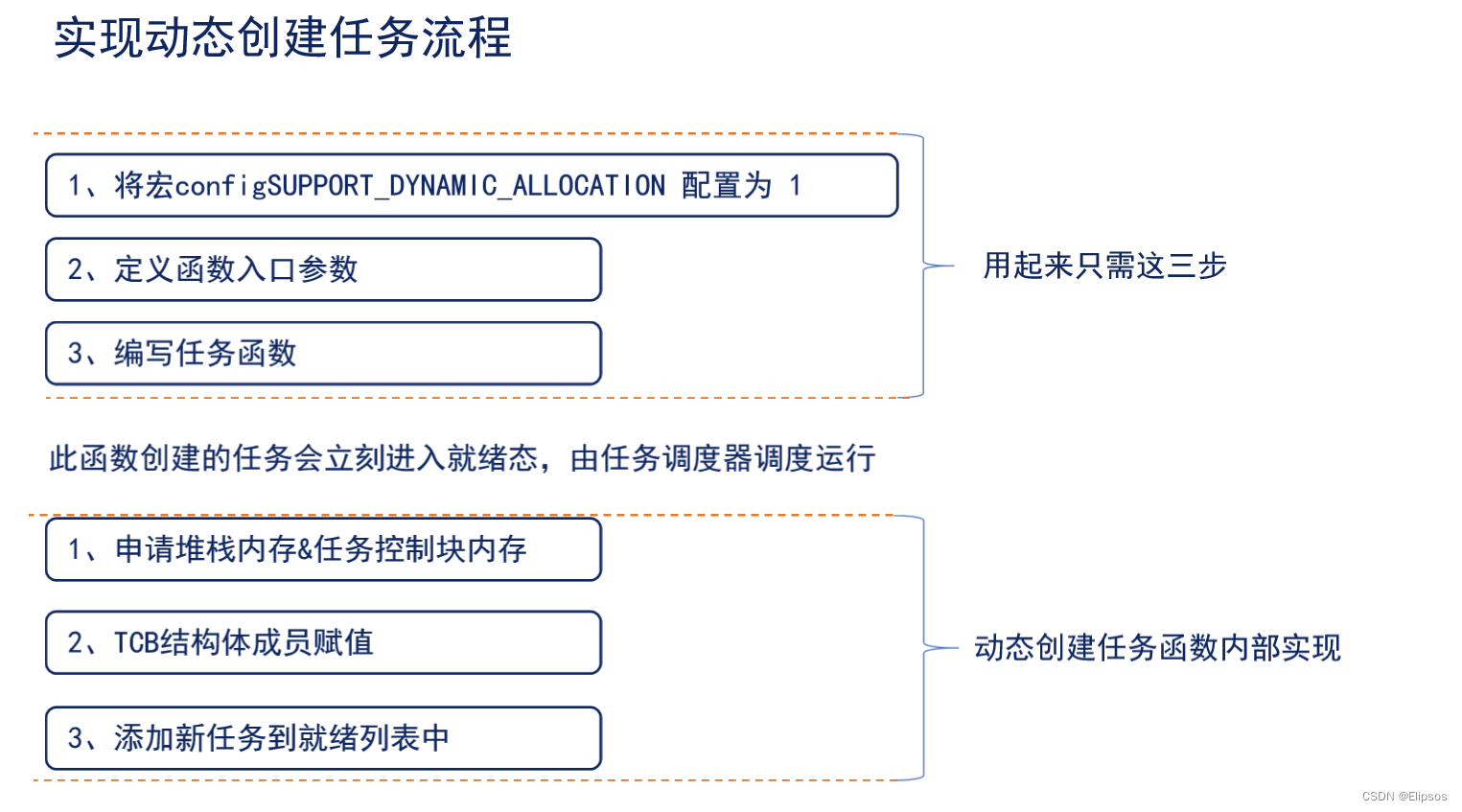
#if ( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode,
const char * const pcName,
const configSTACK_DEPTH_TYPE usStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
TaskHandle_t * const pxCreatedTask )
{
TCB_t * pxNewTCB;
BaseType_t xReturn;
#if ( portSTACK_GROWTH > 0 )//判断栈的生长方向,大于0向上,小于反之;栈向下生长,堆向上生长
{
pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) );
if( pxNewTCB != NULL )//判断是否申请成功
{
pxNewTCB->pxStack = ( StackType_t * ) pvPortMallocStack( ( ( ( size_t ) usStackDepth ) * sizeof( StackType_t ) ) );
if( pxNewTCB->pxStack == NULL )
{
vPortFree( pxNewTCB );
pxNewTCB = NULL;//任务控制块为空
}
}
}
#else
{
StackType_t * pxStack;//定义任务堆栈,存放任务堆栈首地址
pxStack = pvPortMallocStack( ( ( ( size_t ) usStackDepth ) * sizeof( StackType_t ) ) ); //得到堆栈首地址,如果定义了位100,则实际位100*4字节
if( pxStack != NULL )//不为空
{
pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) ); /*lint !e9087 !e9079 All values returned by pvPortMalloc() have at least the alignment required by the MCU's stack, and the first member of TCB_t is always a pointer to the task's stack. */
if( pxNewTCB != NULL )//首地址信息存储传递到任务快
{
pxNewTCB->pxStack = pxStack;//任务堆栈首地址赋值给任务
}
else
{
/* The stack cannot be used as the TCB was not created. Free
* it again. */
vPortFreeStack( pxStack );
}
}
else
{
pxNewTCB = NULL;
}
}
#endif
if( pxNewTCB != NULL )
{
#if ( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 ) /*lint !e9029 !e731 Macro has been consolidated for readability reasons. */
{
pxNewTCB->ucStaticallyAllocated = tskDYNAMICALLY_ALLOCATED_STACK_AND_TCB;
}
#endif
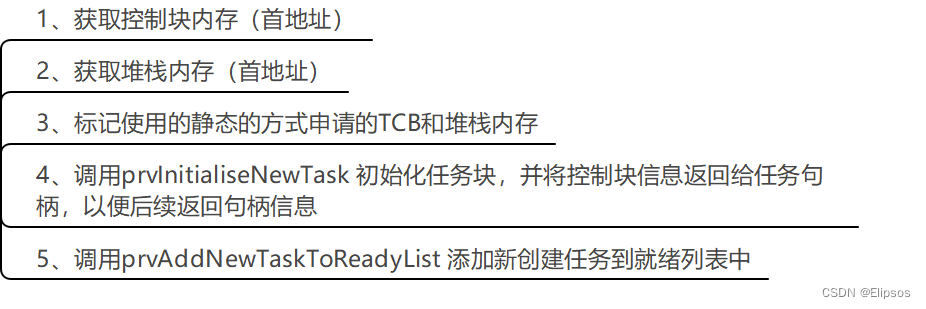
prvInitialiseNewTask( pxTaskCode, pcName, ( uint32_t ) usStackDepth, pvParameters, uxPriority, pxCreatedTask, pxNewTCB, NULL );
prvAddNewTaskToReadyList( pxNewTCB );//添加新任务到就序列表
xReturn = pdPASS;
}
else
{
xReturn = errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY;
}
return xReturn;
}
#endif
static void prvInitialiseNewTask( TaskFunction_t pxTaskCode,
const char * const pcName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
const uint32_t ulStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
TaskHandle_t * const pxCreatedTask,
TCB_t * pxNewTCB,
const MemoryRegion_t * const xRegions )
{
StackType_t * pxTopOfStack;
UBaseType_t x;
#if ( portUSING_MPU_WRAPPERS == 1 )
/* Should the task be created in privileged mode? */
BaseType_t xRunPrivileged;
if( ( uxPriority & portPRIVILEGE_BIT ) != 0U )
{
xRunPrivileged = pdTRUE;
}
else
{
xRunPrivileged = pdFALSE;
}
uxPriority &= ~portPRIVILEGE_BIT;
#endif /* portUSING_MPU_WRAPPERS == 1 */
/* Avoid dependency on memset() if it is not required. */
#if ( tskSET_NEW_STACKS_TO_KNOWN_VALUE == 1 )
{
/* Fill the stack with a known value to assist debugging. */
( void ) memset( pxNewTCB->pxStack, ( int ) tskSTACK_FILL_BYTE, ( size_t ) ulStackDepth * sizeof( StackType_t ) );
}
#endif /* tskSET_NEW_STACKS_TO_KNOWN_VALUE */
/* Calculate the top of stack address. This depends on whether the stack
* grows from high memory to low (as per the 80x86) or vice versa.
* portSTACK_GROWTH is used to make the result positive or negative as required
* by the port. */
#if ( portSTACK_GROWTH < 0 )
{
pxTopOfStack = &( pxNewTCB->pxStack[ ulStackDepth - ( uint32_t ) 1 ] );
pxTopOfStack = ( StackType_t * ) ( ( ( portPOINTER_SIZE_TYPE ) pxTopOfStack ) & ( ~( ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) ) ); /*lint !e923 !e9033 !e9078 MISRA exception. Avoiding casts between pointers and integers is not practical. Size differences accounted for using portPOINTER_SIZE_TYPE type. Checked by assert(). */
/* Check the alignment of the calculated top of stack is correct. */
configASSERT( ( ( ( portPOINTER_SIZE_TYPE ) pxTopOfStack & ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) == 0UL ) );
#if ( configRECORD_STACK_HIGH_ADDRESS == 1 )
{
/* Also record the stack's high address, which may assist
* debugging. */
pxNewTCB->pxEndOfStack = pxTopOfStack;
}
#endif /* configRECORD_STACK_HIGH_ADDRESS */
}
#else /* portSTACK_GROWTH */
{
pxTopOfStack = pxNewTCB->pxStack;
/* Check the alignment of the stack buffer is correct. */
configASSERT( ( ( ( portPOINTER_SIZE_TYPE ) pxNewTCB->pxStack & ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) == 0UL ) );
/* The other extreme of the stack space is required if stack checking is
* performed. */
pxNewTCB->pxEndOfStack = pxNewTCB->pxStack + ( ulStackDepth - ( uint32_t ) 1 );
}
#endif /* portSTACK_GROWTH */
/* Store the task name in the TCB. */
if( pcName != NULL )//入口函数
{
for( x = ( UBaseType_t ) 0; x < ( UBaseType_t ) configMAX_TASK_NAME_LEN; x++ )
{
pxNewTCB->pcTaskName[ x ] = pcName[ x ];//将名字一一存入在任务控制块的成员里
/* Don't copy all configMAX_TASK_NAME_LEN if the string is shorter than
* configMAX_TASK_NAME_LEN characters just in case the memory after the
* string is not accessible (extremely unlikely). */
if( pcName[ x ] == ( char ) 0x00 )
{
break;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
/* Ensure the name string is terminated in the case that the string length
* was greater or equal to configMAX_TASK_NAME_LEN. */
pxNewTCB->pcTaskName[ configMAX_TASK_NAME_LEN - 1 ] = '\0';
}
else
{
pxNewTCB->pcTaskName[ 0 ] = 0x00;
}
/* This is used as an array index so must ensure it's not too large. */
configASSERT( uxPriority < configMAX_PRIORITIES );
if( uxPriority >= ( UBaseType_t ) configMAX_PRIORITIES )
{
uxPriority = ( UBaseType_t ) configMAX_PRIORITIES - ( UBaseType_t ) 1U;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
pxNewTCB->uxPriority = uxPriority;//赋值,把任务的特征信息赋值给任务块
#if ( configUSE_MUTEXES == 1 )
{
pxNewTCB->uxBasePriority = uxPriority;
pxNewTCB->uxMutexesHeld = 0;
}
#endif /* configUSE_MUTEXES */
vListInitialiseItem( &( pxNewTCB->xStateListItem ) );
vListInitialiseItem( &( pxNewTCB->xEventListItem ) );
/* Set the pxNewTCB as a link back from the ListItem_t. This is so we can get
* back to the containing TCB from a generic item in a list. */
listSET_LIST_ITEM_OWNER( &( pxNewTCB->xStateListItem ), pxNewTCB );
/* Event lists are always in priority order. */
listSET_LIST_ITEM_VALUE( &( pxNewTCB->xEventListItem ), ( TickType_t ) configMAX_PRIORITIES - ( TickType_t ) uxPriority ); //32减去优先级
listSET_LIST_ITEM_OWNER( &( pxNewTCB->xEventListItem ), pxNewTCB );//归属者复制給任务控制块
#if ( portCRITICAL_NESTING_IN_TCB == 1 )
{
pxNewTCB->uxCriticalNesting = ( UBaseType_t ) 0U;
}
#endif /* portCRITICAL_NESTING_IN_TCB */
#if ( configUSE_APPLICATION_TASK_TAG == 1 )
{
pxNewTCB->pxTaskTag = NULL;
}
#endif /* configUSE_APPLICATION_TASK_TAG */
#if ( configGENERATE_RUN_TIME_STATS == 1 )
{
pxNewTCB->ulRunTimeCounter = ( configRUN_TIME_COUNTER_TYPE ) 0;
}
#endif /* configGENERATE_RUN_TIME_STATS */
#if ( portUSING_MPU_WRAPPERS == 1 )
{
vPortStoreTaskMPUSettings( &( pxNewTCB->xMPUSettings ), xRegions, pxNewTCB->pxStack, ulStackDepth );
}
#else
{
/* Avoid compiler warning about unreferenced parameter. */
( void ) xRegions;
}
#endif
#if ( configNUM_THREAD_LOCAL_STORAGE_POINTERS != 0 )
{
memset( ( void * ) &( pxNewTCB->pvThreadLocalStoragePointers[ 0 ] ), 0x00, sizeof( pxNewTCB->pvThreadLocalStoragePointers ) );
}
#endif
#if ( configUSE_TASK_NOTIFICATIONS == 1 )
{
memset( ( void * ) &( pxNewTCB->ulNotifiedValue[ 0 ] ), 0x00, sizeof( pxNewTCB->ulNotifiedValue ) );
memset( ( void * ) &( pxNewTCB->ucNotifyState[ 0 ] ), 0x00, sizeof( pxNewTCB->ucNotifyState ) );
}
#endif
#if ( configUSE_NEWLIB_REENTRANT == 1 )
{
/* Initialise this task's Newlib reent structure.
* See the third party link http://www.nadler.com/embedded/newlibAndFreeRTOS.html
* for additional information. */
_REENT_INIT_PTR( ( &( pxNewTCB->xNewLib_reent ) ) );
}
#endif
#if ( INCLUDE_xTaskAbortDelay == 1 )
{
pxNewTCB->ucDelayAborted = pdFALSE;
}
#endif
#if ( portUSING_MPU_WRAPPERS == 1 )
{
/* If the port has capability to detect stack overflow,
* pass the stack end address to the stack initialization
* function as well. */
#if ( portHAS_STACK_OVERFLOW_CHECKING == 1 )
{
#if ( portSTACK_GROWTH < 0 )
{
pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxNewTCB->pxStack, pxTaskCode, pvParameters, xRunPrivileged );
}
#else /* portSTACK_GROWTH */
{
pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxNewTCB->pxEndOfStack, pxTaskCode, pvParameters, xRunPrivileged );
}
#endif /* portSTACK_GROWTH */
}
#else /* portHAS_STACK_OVERFLOW_CHECKING */
{
pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxTaskCode, pvParameters, xRunPrivileged );
}
#endif /* portHAS_STACK_OVERFLOW_CHECKING */
}
#else /* portUSING_MPU_WRAPPERS */
{
#if ( portHAS_STACK_OVERFLOW_CHECKING == 1 )
{
#if ( portSTACK_GROWTH < 0 )
{
pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxNewTCB->pxStack, pxTaskCode, pvParameters );
}
#else /* portSTACK_GROWTH */
{
pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxNewTCB->pxEndOfStack, pxTaskCode, pvParameters );
}
#endif /* portSTACK_GROWTH */
}
#else /* portHAS_STACK_OVERFLOW_CHECKING */
{
pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxTaskCode, pvParameters );
}
#endif /* portHAS_STACK_OVERFLOW_CHECKING */
}
#endif /* portUSING_MPU_WRAPPERS */
if( pxCreatedTask != NULL )
{
/* Pass the handle out in an anonymous way. The handle can be used to
* change the created task's priority, delete the created task, etc.*/
*pxCreatedTask = ( TaskHandle_t ) pxNewTCB;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
portINITIAL_EXC_RETURN(0xFFFFFFFD)代表返回为线程模式
R11-R4不是寄存器而是内存,目的是将数据操作到对应的寄存器里而不是直接执行,需要手动出栈入栈,最后返回地址pxTopOfStack(任务控制块)
pxNewTCB返回的则是pxStack
任务句柄不为空等于任务控制块
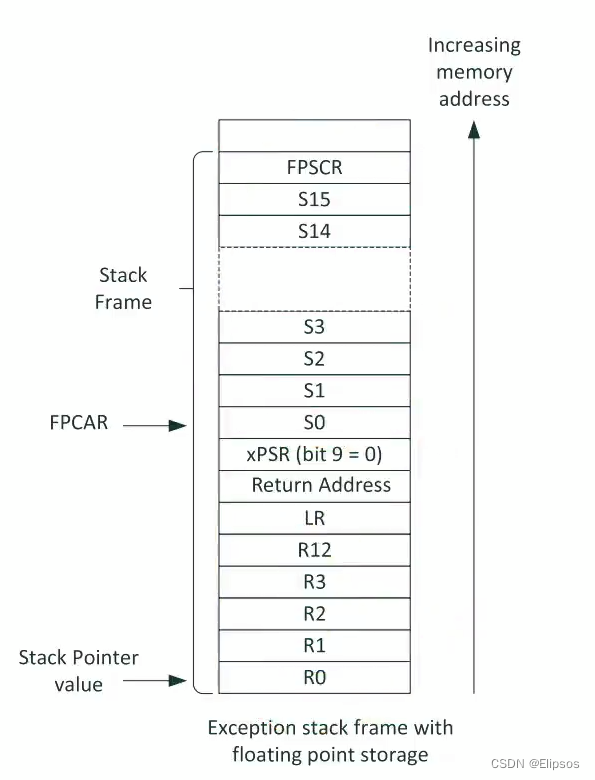
FPSCR-S0:浮点数才会用到,M3,M7会自动入栈出栈
xPSR-R0:也是系统自动入栈出栈
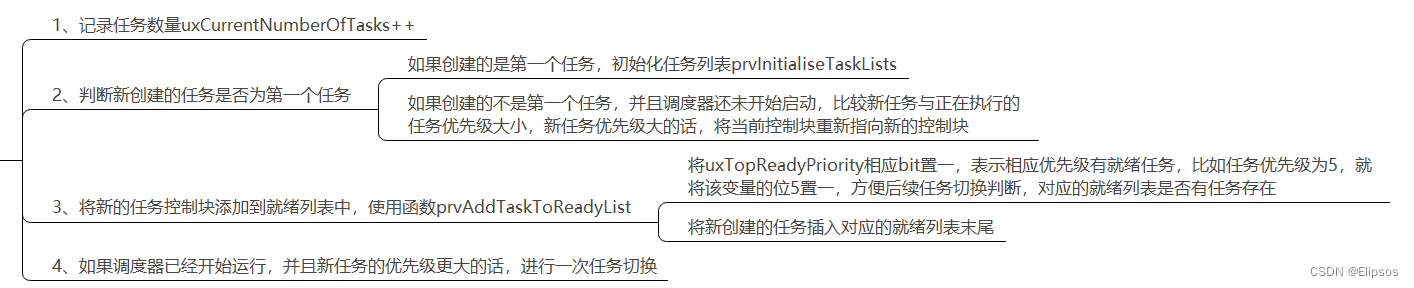
调用prvAddNewTaskToReadyList 添加新创建任务到就绪列表中:
四、任务创建和删除(静态方式)
与动态创建的唯一区别是创建的方式不一样了

#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
{
StaticTask_t * pxIdleTaskTCBBuffer = NULL;
StackType_t * pxIdleTaskStackBuffer = NULL;
uint32_t ulIdleTaskStackSize;
/* The Idle task is created using user provided RAM - obtain the
* address of the RAM then create the idle task. */
vApplicationGetIdleTaskMemory( &pxIdleTaskTCBBuffer, &pxIdleTaskStackBuffer, &ulIdleTaskStackSize );
xIdleTaskHandle = xTaskCreateStatic( prvIdleTask,
configIDLE_TASK_NAME,
ulIdleTaskStackSize,
( void * ) NULL,
portPRIVILEGE_BIT,
pxIdleTaskStackBuffer,
pxIdleTaskTCBBuffer );
控制块等需要人为主动提供,通过vApplicationGetIdleTaskMemory函数分配内存
void task3( void * pvParameters );
StaticTask_t idle_task_tcb;
StackType_t idle_task_stack[configMINIMAL_STACK_SIZE];
StaticTask_t timer_task_tcb;
StackType_t timer_task_stack[configTIMER_TASK_STACK_DEPTH];
//空闲内存任务分配
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,//空闲任务控制块,需分配内存保存任务特征信息
StackType_t ** ppxIdleTaskStackBuffer,//空闲任务堆栈
uint32_t * pulIdleTaskStackSize )
{
* ppxIdleTaskTCBBuffer = &idle_task_tcb;//赋值地址
* ppxIdleTaskStackBuffer = idle_task_stack;//手动分配数组或者Malloc分配内存
* pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;//空闲任务堆栈大小
}
/*软件定时器分配 */
void vApplicationGetTimerTaskMemory( StaticTask_t ** ppxTimerTaskTCBBuffer,
StackType_t ** ppxTimerTaskStackBuffer,
uint32_t * pulTimerTaskStackSize )
{
* ppxTimerTaskTCBBuffer = &timer_task_tcb;//内存控制块
* ppxTimerTaskStackBuffer = timer_task_stack;
* pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}
void freertos_demo(void)
{
start_task_handler = xTaskCreateStatic( (TaskFunction_t ) start_task,
(char * ) "start_task",
(uint32_t ) START_TASK_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) START_TASK_PRIO,
(StackType_t * ) start_task_stack,
(StaticTask_t * ) &start_task_tcb );
vTaskStartScheduler();
}
静态任务的创建及任务实现
区别
1. 动态创建任务:
- 动态创建任务是在运行时通过调用API函数来创建任务。
- 可以根据需要创建不同数量的任务。
- 可以在运行时动态地修改任务的优先级、堆栈大小等参数。 - 可以动态删除任务,释放系统资源。
2. 静态创建任务:
- 静态创建任务是在编译时通过在配置文件中定义任务来创建任务。
- 静态创建任务需要在编译时确定任务的数量和参数。
- 静态创建任务的优点是效率高,因为任务的内存分配是在编译时完成的,不需要在运行时动态分配内存。
- 静态创建任务的缺点是不灵活,无法在运行时动态修改任务的参数。
总的来说,动态创建任务适用于任务数量和参数需要在运行时动态调整的场景,而静态创建任务适用于任务数量和参数在编译时确定且不需要在运行时修改的场景。根据具体的需求和系统资源的限制,选择合适的创建任务方式。
















 2261
2261

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









