






👉高分毕设👈:总评 95 +,优秀 评级,逻辑缜密,结构完整。
👉建模文件👈:公z号【双语解析Hub】,回复“陀螺”
随着微机械技术的发展,MEMS 技术广泛应用在在航空航天、智能手机和虚拟现 实等领域。其中,陀螺仪作为组成运动控制平台的重要元件,近年来备受关注。本文将展示如何使用solidworks建模三轴环形陀螺仪,并使用comsol对其进行模态仿真、谐响应仿真、重力仿真等。
一、结构设计
通过研究国内外三轴 MEMS 的发展现状,可得知相比于方形陀螺,环状陀螺由于更加对称,具有更出色的抗过载能力。并且环形陀螺的结构简单,故成本较低。
陀螺另一个重要的结构就是弹性梁,它可以储存机械能、提供弹力,并将力/力矩转 换成弹性应变和位移,并通过检测位移/应变的变化,转换成电信号并由检测器件输出。 合理设计弹性梁的形状和弹性系数,可以有效地实现陀螺的预期驱动和检测模式,并减少对干扰模式的影响。
1.1 弹性梁设计
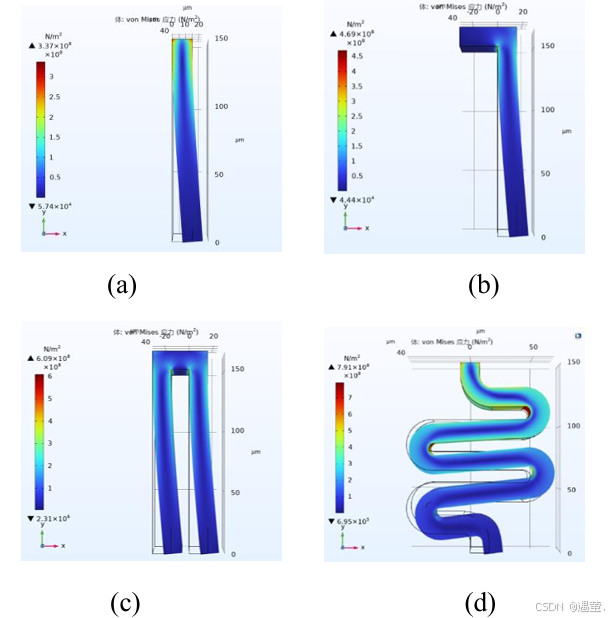
目前, MEMS 陀螺仪大多采用的弹性梁有直梁、L 型梁、U 型梁、S 型梁等,如下图:

通过 COMSOL 软件的稳态研究进行应力与位移仿真,对相同地方施加约束后,分别对 X、Y、Z 轴方向施加载荷(0.01N),四类弹性梁的仿真分析结果如下(X轴应力)
为了方便比较,下面将仿真得到的应力与位移数据统计为表格 ,如下所示:
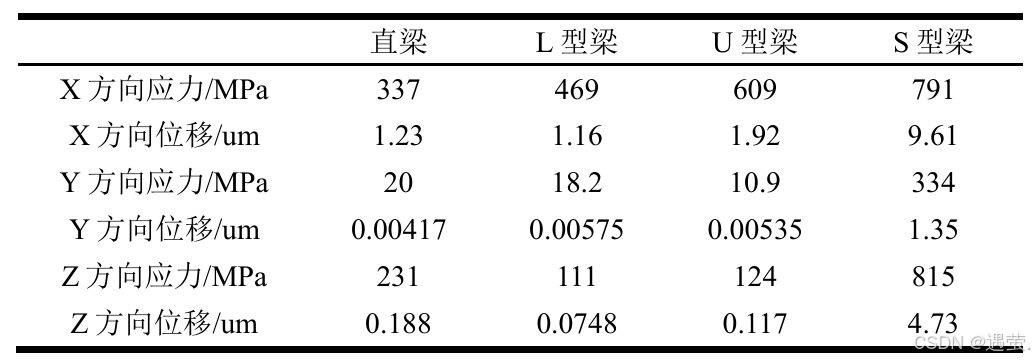
相较于直梁与L型梁,U 型梁与 S 型梁在 X、Y、Z 方向上刚度 相对较小,且三个方向上的刚度相差较大,体现出较为良好的解耦性能。其中,S 型梁 的刚度明显小于其余三种弹性梁。,可以更好地适应三轴 MEMS 陀螺仪的工作特性。
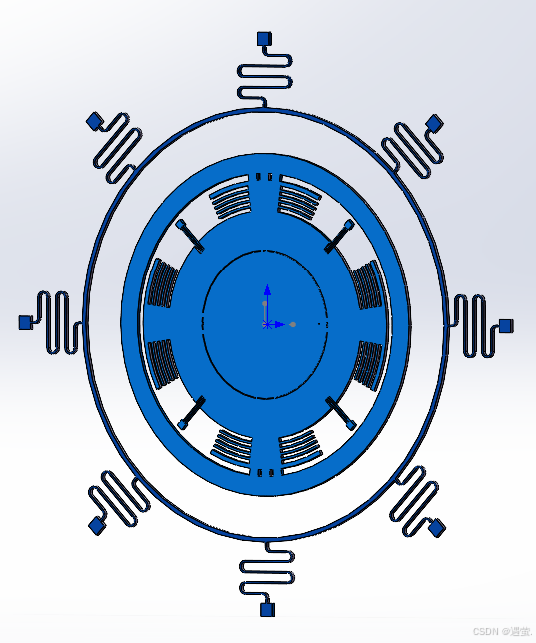
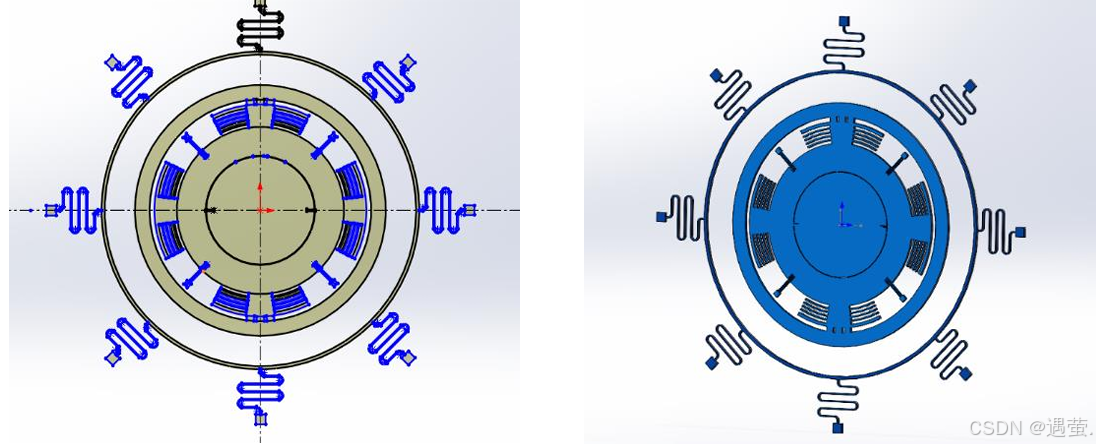
故采用solidworks对三轴陀螺仪整体建模如下:
二、 仿真分析
2.1 模态仿真
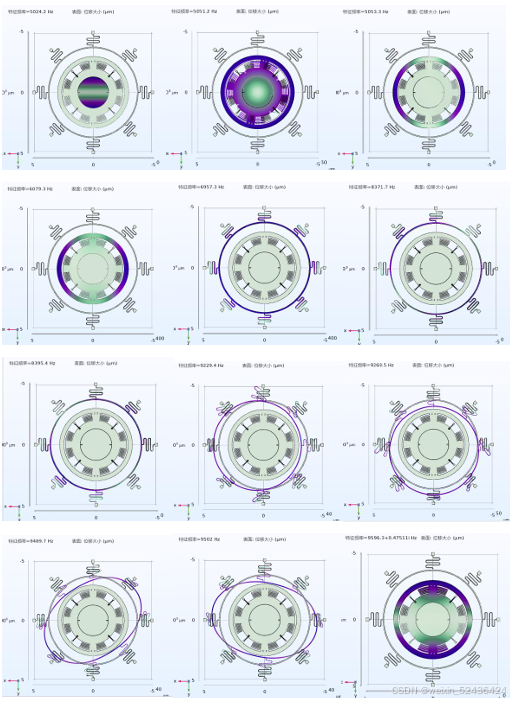
在 Comsol 软件中导入 Solidworks 所建的模型结构,定义材料为各向同性 MEMS 材料,固定锚点约束后划分网格,选取三轴轮环形陀螺仪的前十二 阶模态仿真结果,如图 4.12 所示,可知,该陀螺仪的第一阶模态Y 轴检测模态;第二 阶模态为X/Y 轴驱动模态;第三阶模态为X 轴检测模态;第四阶至第九阶为陀螺仪的干扰模态,第十阶模态Z轴检测模态;第十一阶模态为Z 轴驱动模态,第十二阶为陀螺仪的干扰模态。
通过修改陀螺仪结构的主要尺寸,分析其对谐振频率的影响规律,可确定相对最优结构参数设计方案来达到工作频率的要求。
最终,本文设计的陀螺结构固有频率如下:
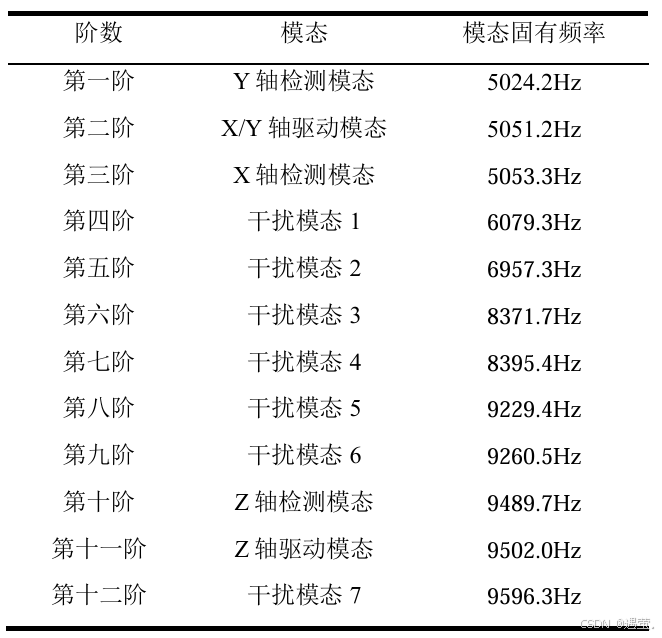
根据仿真结果显示,该三轴 MEMS 陀螺仪的驱动模式和检测模式的固有频率与其 他干扰模式的固有频率存在明显差异,表明干扰影响与耦合较小,证明这种结构设计 与参数选择是合理可行的。此外,X 轴的最大频差仅为 2.1Hz,频差较小,表明陀螺仪 的 X 轴灵敏度较高。
2.2 灵敏度计算
公式较长,详见资源文件。本文所设计的陀螺仪X轴检测灵敏度为7.65𝑓𝐹/°/𝑠,Y轴检测灵 敏度为 1.41𝑓𝐹/°/𝑠,,Z 轴检测灵敏度为 2.83fF/°/s,三轴的灵敏度均较高。
2.3 谐响应分析
谐响应分析可用来预测物体在正弦谐波干扰作用下的稳态响应,在 MEMS 器件设计中至关重要。通过分析器件在不同频率下的响应,可以确保其在复杂环境中稳定运 行,避免共振和疲劳等问题,从而提高其性能和可靠性。
分别在驱动和检测方向施加1uN的简谐驱动力。
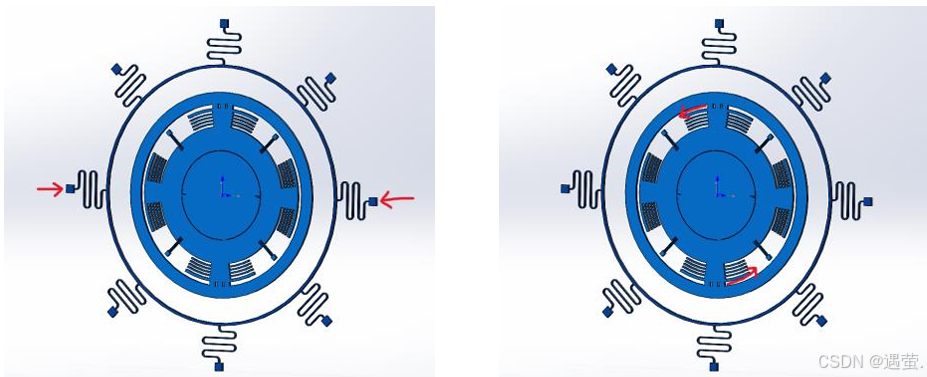
加载后谐振环与轮结构的振幅响应结果与应力位移云图如下(外环驱动模态):
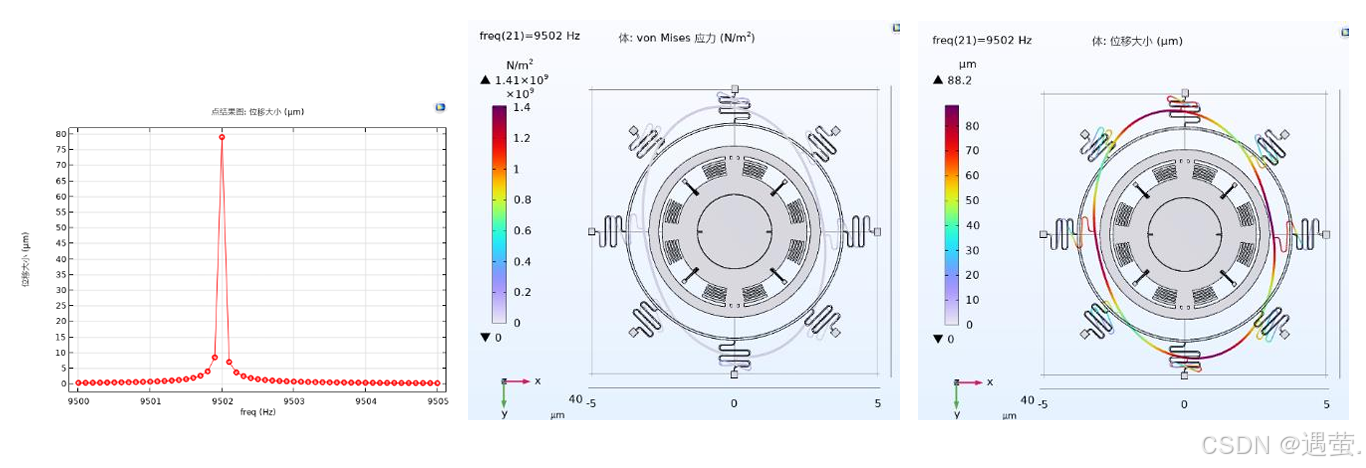
观察上述位移响应曲线图可知,谐振环与轮结构的驱动模态位移峰值在该频率范 围内均只有唯一值,即 Z 轴驱动频率 9502Hz,未被干扰模态影响。
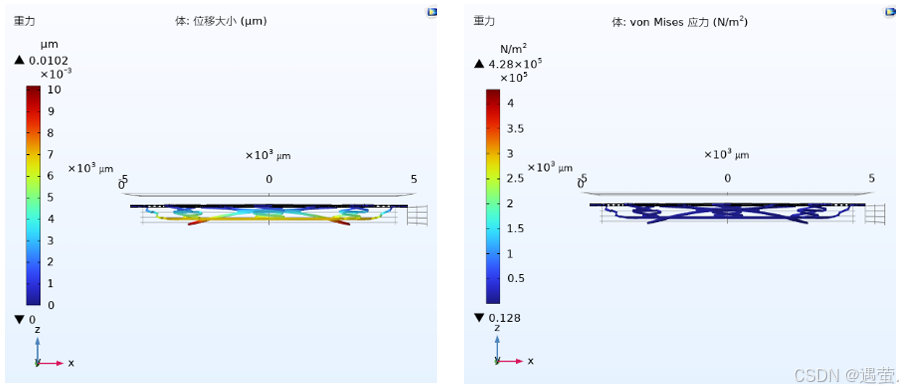
2.4 重力载荷仿真
为确保本文所设计的三轴 MEMS 陀螺仪在静止状态下,弹性梁不会因为自身重力过大而发生破裂,本文对其进行了重力载荷仿真,旨在验证陀螺仪的稳定性和可靠性。
对陀螺结构施加 Z 方向上的重力载荷,大小为 1g,加载后得到陀螺的应力分布与位移云图如下图所示。可以看到,在重力作用下,陀螺仪在 Z 轴方向的位移仅为 0.0102nm,产生的应力也只有 0.428MPa,比起单晶硅的许用应力(1GPa)可忽略不计, 设计的陀螺仪结构强度符合要求。
2.5 抗过载仿真分析
影响 MEMS 陀螺仪冲激响应的主要因素有加速度的峰值 𝐴 、持续时间 𝑡0 以及陀螺仪振动工作模态 的频率 fgyro。
使用 COMSOL 软件对三轴 MEMS 陀螺仪进行瞬态冲击响应仿真。为了探究结构 陀螺的抗高过载能力,在 X、Y、Z 轴方向施加一个脉宽为 5 ms、幅值为 10000 g 的半正弦高过载加速度。应力位移图如下(Z轴):
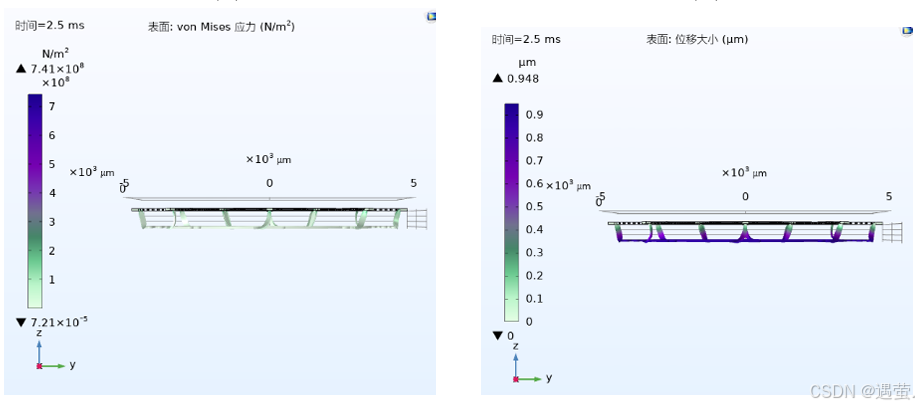
陀螺在 Z 方向上受到的应力最大,为 741 MPa,位移为 0.948 ffm,远低于硅结构的许用应力(1GPa),说明结构具有较好的抗冲击特性。
仿真相关问题请私信作者
三、检测电路
需要的小伙伴请私信作者。


















 1280
1280

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









