






 本文介绍了DS18B20温度传感器的高精度、多功能性以及低功耗特点,同时概述了LM393双比较器芯片的特性,如双比较器、低电压工作和高增益。文章还展示了这两个模块在主程序中的实际应用,如温度测量和数据通信。
本文介绍了DS18B20温度传感器的高精度、多功能性以及低功耗特点,同时概述了LM393双比较器芯片的特性,如双比较器、低电压工作和高增益。文章还展示了这两个模块在主程序中的实际应用,如温度测量和数据通信。
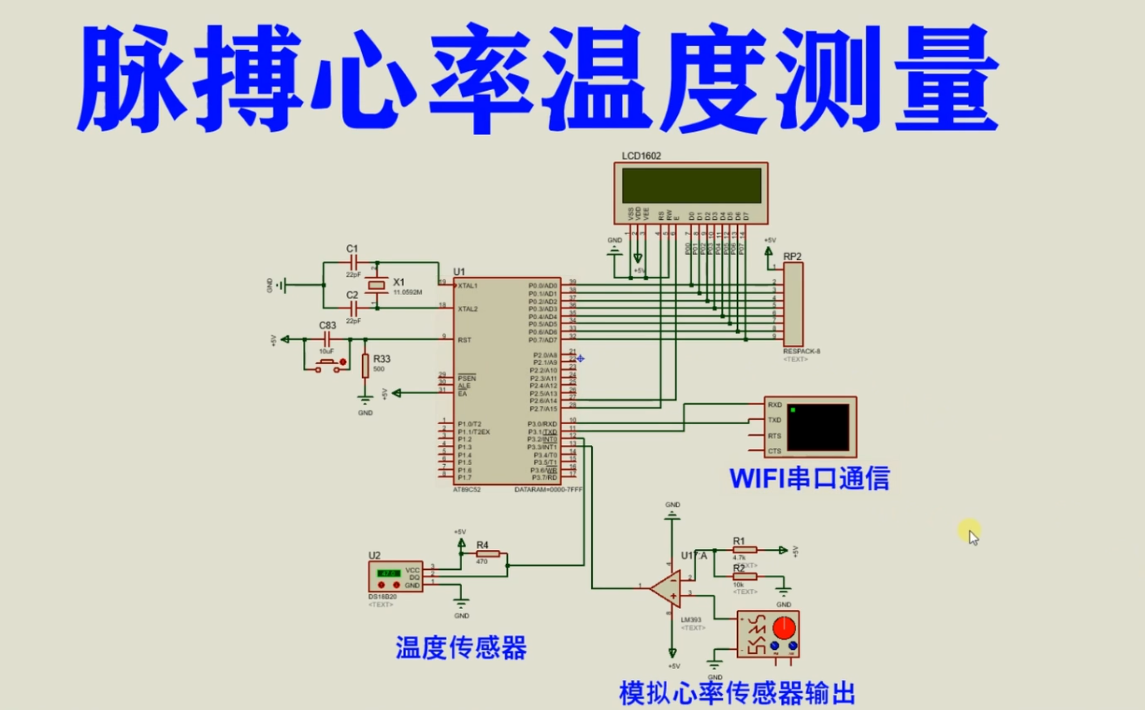
仿真图:
芯片/模块的特点:
DS18B20特点:
- 单总线接口:DS18B20使用单总线接口进行通信,只需要一个引脚就可以连接多个传感器,简化了电路设计和连接。
- 数字输出:DS18B20以数字形式输出温度值,不需要额外的模数转换器。它使用12位的分辨率来表示温度值,可以实现高精度的温度测量。
- 高精度:DS18B20可以提供从-55°C到+125°C的温度测量范围,并具有±0.5°C的温度精度。因此,在许多应用中,它可以提供可靠和准确的温度测量结果。
- 多功能性:除了测量温度,DS18B20还可以执行其他功能,如温度报警功能。它可以设置上下限温度阈值,并在温度超过或低于这些阈值时触发报警。
- 低功耗:DS18B20采用低功耗设计,工作电流极低,只需要很少的能量来进行温度测量和通信。
- 耐用性:DS18B20具有良好的耐用性和可靠性,其封装材料和结构设计使其适用于各种环境条件下的应用。
LM393特点:
双比较器:LM393芯片内部包含两个独立的比较器,可以同时进行两组电压的比较。这使得它适用于需要多个比较操作的电路设计。
低电压工作:LM393可以在较低的电源电压下工作,通常在2V至36V之间。这使得它适用于低电压应用,同时也能在较高电压环境中工作。
高增益:芯片具有高增益特性,可以对输入电压的微小变化做出敏感的响应。这使得它在精确测量、电压比较和判定等应用中有广泛的应用。
宽输入电压范围:LM393的输入电压范围广,允许处理负电压和正电压信号。这使得它适用于处理不同电平的输入信号,增加了其应用的灵活性。
低功耗:该芯片的功耗较低,适合在功耗要求较低的电池供电应用中使用。
宽温度范围:LM393可以在较广的温度范围内工作,通常为-40°C至+85°C。这使得它适用于各种工作环境和应用场景。
主程序:
#include "reg52.h"
#include <stdio.h>
#include "delay.h"
#include "lcd1602.h"
#include "18b20.h"
unsigned char datIndex = 0;
unsigned int timeCnt = 0; //中间变量值
unsigned char heartRate = 0;
unsigned int heartRateBuf[3] = {0}; //记录多次心率值求平均
unsigned char xdata dis0[16]; //定义显示区域临时存储数组
bit dispFlag = 0; //更新标志变量
bit readTempFlag = 0; //读取温度标志
unsigned char g_messageCnt; //短信发送计数
bit refreshHRFlag = 0;
bit updateFlag = 0;
bit sendFlag = 0;
void InitTimer0(void); //函数声明
void UARTSendStr(unsigned char *s, unsigned char length);
void UARTInit(void);
void UARTSendByte(unsigned char dat);
void InitTimer1(void);
/****************主函数***************/
void main()
{
int tempBuf; //温度读取值
float temperature; //温度实际值
EX1 = 1; //允许外部中断1中断
PX1 = 1;
EA = 1; //开总中断
IT1 = 1; //外部中断1负跳变中断
InitTimer0(); //初始化定时器
InitTimer1();
UARTInit();
LCD_Init(); //初始化液晶
DelayMs(200); //延时有助于稳定
LCD_Clear(); //清屏
DelayMs(200);
LCD_DispStr(0, 0, " Please wait!!! ");
LCD_DispStr(0, 1, "WIFI is starting");
DelayS(2);
UARTSendStr("AT+CIPMUX=1\r\n", 13); //打开多连接
DelayMs(250);
UARTSendStr("AT+CIPSERVER=1,8080\r\n", 21); //建立服务 端口号为8080
DelayMs(250);
LCD_DispStr(0, 0, " Welcome!!! ");
LCD_DispStr(0, 1, "WIFI is ready!!!");
DelayS(2);
LCD_Clear();
while (1)
{
if (refreshHRFlag == 1) //刷新心率
{
EX1 = 0;
TR0 = 0;
refreshHRFlag = 0;
heartRateBuf[datIndex] = timeCnt * 5; //算出间隔时间
TH0 = 0xEE; //(65536 - 0.005*11059200/12) / 256
TL0 = 0x00; //(65536 - 0.005*11059200/12) % 256 5ms
timeCnt = 0; //50ms计数清零
datIndex++;
if (datIndex > 3) //记录到超过等于2次时间
{
datIndex = 1; //计数从1开始
updateFlag = 1; //测得2次开始显示
}
EX1 = 1;
TR0 = 1;
}
if (dispFlag == 1)
{
if (updateFlag == 0) // 如果显示关 检测心率是否真实
{
heartRate = 0;
}
else // 如果显示开
{
heartRate = 60000 / ((heartRateBuf[1] >> 1) + (heartRateBuf[2] >> 1)); // 心率计算 2次求平均值
}
// EA = 0;
DS18B20_Start(); // 启动温度检测
DS18B20_GetTemp(&tempBuf); // 获取温度中间值
// EA = 1;
temperature = (float)tempBuf * 0.0625; // 温度值转换
sprintf(dis0, "Heart:%3dbpm", (unsigned int)heartRate); // 打印当前心率
LCD_DispStr(0, 0, dis0); // 显示心率
sprintf(dis0, "Temp:%5.1f", temperature); // 打印当前温度
LCD_DispStr(0, 1, dis0); // 显示温度
LCD_DispOneChar(10, 1, 0xdf); // 显示℃
LCD_DispOneChar(11, 1, 'C'); // 显示℃
dispFlag = 0; // 更新标志清零
}
if (sendFlag == 1) //数据发送计数
{
sendFlag = 0;
UARTSendStr("AT+CIPSEND=0,28\r\n", 17); //发送32位数据
DelayMs(20);
sprintf(dis0, "Heart:%3dbpm\r\n", (unsigned int)heartRate); // 发送当前心率
UARTSendStr(dis0, 14); //发送数据内容
DelayMs(20);
sprintf(dis0, "Temp:%5.1f'C\r\n", temperature); // 发送温度
UARTSendStr(dis0, 14); //发送数据内容
DelayMs(20);
}
}
}
void EXT1() interrupt 2
{
if (timeCnt < 60) //当连续两次检测时间间隔小于60*5ms=300ms不处理
{
TR0 = 1; //开定时器
}
else
{
refreshHRFlag = 1;
}
}
/*************定时器0初始化程序***************/
void InitTimer0(void)
{
TMOD |= 0x01; //使用模式1,16位定时器,使用"|"符号可以在使用多个定时器时不受影响
TH0 = 0xEE; //(65536 - 0.005*11059200/12) / 256
TL0 = 0x00; //(65536 - 0.005*11059200/12) % 256 5ms
PT0 = 1; //设置高优先级
EA = 1; //总中断打开
ET0 = 1; //定时器中断打开
TR0 = 0; //定时器开关关闭
}
/*************定时器0中断服务程序***************/
void Timer0_INT() interrupt 1
{
TH0 = 0xEE; //(65536 - 0.005*11059200/12) / 256
TL0 = 0x00; //(65536 - 0.005*11059200/12) % 256 5ms
timeCnt++; //每50ms一次计数
if (timeCnt > 300) //当超过300*5ms=1.5s没有检测到信号停止显示
{
datIndex = 0; //数据个数清零
timeCnt = 0; //10ms计数清零
updateFlag = 0; //显示关
TR0 = 0; //定时器关
}
}
void InitTimer1(void)
{
TMOD |= 0x10; //使用模式1,16位定时器,使用"|"符号可以在使用多个定时器时不受影响
TL1 = 0x00; //设置定时初始值
TH1 = 0x4C; //设置定时初始值 50ms
EA = 1; //总中断打开
ET1 = 1; //定时器中断打开
TR1 = 1; //定时器开关打开
}
void Timer1_INT(void) interrupt 3
{
static unsigned char time_50ms = 0;
TL1 = 0x00; //设置定时初始值
TH1 = 0x4C; //设置定时初始值 50ms
time_50ms++;
if (time_50ms > 100)
{
sendFlag = 1; //5s发送一次数据
time_50ms = 0;
}
if (time_50ms % 20 == 0) //定时1s到
{
dispFlag = 1; //更新标志置位
}
}
void UARTInit(void)
{
SCON = 0x50; //串口方式1,1个起始位,1个停止位,8位数据,可变波特率
//波特率115200
TH2 = 0xFF;
TL2 = 0xFD;
RCAP2H = 0xFF; //(65536-(FOSC/32/BAUD)) BAUD = 115200 FOSC = 11059200
RCAP2L = 0xFD;
/********波特率发生器接收和发送相同波特率,内部控制*********/
TCLK = 1; //发送时钟标志
RCLK = 1; //接收时钟标志
C_T2 = 0; //内部定时器
EXEN2 = 0; //关闭定时器2中断
TR2 = 1; //打开定时器2计数
ES = 0; //关闭串口中断
EA = 1; //打开总中断
// PS = 1; //高优先级
}
void UARTSendByte(unsigned char dat)
{
unsigned char time_out;
time_out = 0x00;
SBUF = dat; //将数据放入SBUF中
while ((!TI) && (time_out < 100)) //检测是否发送出去
{
time_out++;
DelayUs10x(2);
} //未发送出去 进行短暂延时
TI = 0; //清除ti标志
}
void UARTSendStr(unsigned char *s, unsigned char length)
{
unsigned char num = 0;
while (num < length) //发送长度对比
{
UARTSendByte(*s); //放松单字节数据
s++; //指针++
num++; //下一个++
}
}
// void UART_INT(void) interrupt 4 //串行中断服务程序
// {
// if (RI) //判断是接收中断产生
// RI = 0; //标志位清零
// if (TI) //如果是发送标志位,清零
// TI = 0;
// }
设计文件:

















 1361
1361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









