







摘要
本篇文章用STM32CubeMX和STM32CubeIDE软件编程,主控芯片为STM32F407ZGT6驱动六轴陀螺仪传感器。本章我们将来驱动MPU6050,通过I2C通信总线读取其原始数据,并利用其自带的DMP实现姿态解算,最终将测得的数据通过UART串口发送到上位机。通过本文可以初步学习I2C原理以及MPU6050传感器的使用。
所用工具:
1、芯片: STM32F407ZGT6
2、驱动设备:六轴传感器
3、配置软件:STM32CubeMX
4、IDE: STM32CubeIDE
知识概括:
通过本篇文章您将学到:
1、六轴传感器原理
2、I2C通信原理
3、UART发送数据
一、简介
1.I2C原理
IIC(Inter—Integrated Circuit)总线是一种由PHILIPS公司开发的两线式串行总线,即双向串行数据线SDA和时钟信号线SCL,所以是同步方式通信,用于连接微控制器及其外围设备,可发送和接收数据。在CPU与被控IC之间、IC与IC之间进行双向传送。I2C通讯有标准模式和快速模式,标准模式传输速率为
100 kbps,快速模式为400 kbps。
I2C是一种多设备总线,一般有一个主设备、多个从设备。一个I2C总线上可以挂载多个设备,每个设备有1个地址。I2C总线上的两根信号线有上拉电阻,当I2C器件空闲时,其输出接口时高阻态,当所有设备都空闲时,I2C总线上时高电平。其连接方式如图所示。

I2C总线通信协议:I2C通讯总是由主机启动,每次通讯过程由起始信号开始,由停止信号结束。一个数据包是8个位,每个数据包后有一个应答位(ACK)或非应答位(NACK)。主设备向从设备发送1字节数据的时序图如图所示。

起始位:当SCL是高电平时,SDA的下跳沿就是起始位。
停止位:当SCL为高电平时,SDA的上跳沿就是停止位。
数据位:在SCL的一个时钟周期内传输一个数据位。在SCL为低电平时,发送设备更新SDA的电平;当SCL为高电平时,接收设备读取SDA的电平就是有效的一位数据。
数据包:I2C数据通讯一个数据包总是8个位。
应答信号:发送设备在第9个SCL时钟周期采集接收设备的应答信号。若到的SDA为低电平,就是应答信号ACK,如果采集的SDA是高电平,就是非应答信号NACK。
在一次I2C通信过程中,可以传输多字节数据。主机启动I2C通信后,发送的第一个字节是目标设备地址,后面在发送或接收的数据是由具体器件的指令定义决定的,I2C通信协议只是定义了基本的数据传输时序。I2C不仅可以通过硬件实现,还可以通过GPIO引脚模拟I2C通信,即软件模拟I2C通信。
2.MPU6050介绍
MPU6050是当前最流行的一款六轴(三轴加速度+三轴角速度(陀螺仪))传感器,该传感器广泛用于四轴、平衡车和空中鼠标等设计,具有非常广泛的应用范围。
MPU6050是InvenSense公司推出的全球首款整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了安装空间。MPU6050内部整合了3轴陀螺仪和3轴加速度传感器,并且含有一个第二IIC接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP: Digital Motion Processor)硬件加速引擎,通过主IIC接口,向应用端输出完整的9轴融合演算数据。有了 DMP,我们可以使用InvenSense公司提供的运动处理资料库,非常方便的实现姿态解算,降低了运动处理运算对操作系统的负荷,同时大大降低了开发难度。
MPU6050传感器检测轴如图所示:

MPU6050传感器的内部框图如图所示:

其中,SCL和SDA是连接MCU的I2C接口,MCU通过这个I2C接口来控制MPU6050, 另外还有一个I2C接口:AUX_CL和AUX_DA,这个接口可用来连接外部从设备,比如磁传感器,这样就可以组成一个九轴传感器。VLOGIC是IO口电压,该引脚最低可以到 1.8V,我们一般直接接VDD即可。AD0是从IIC接口(接 MCU)的地址控制引脚,该引脚控制I2C地址的最低位。如果接GND,则MPU6050的 I2C地址是:0X68,如果接VDD,则是 0X69。
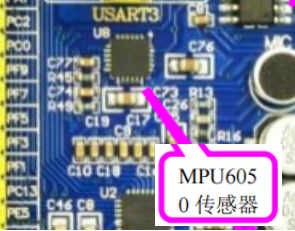
MPU6050传感器实物图如图所示:
3.MPU6050寄存器介绍
(1) 电源管理寄存器1(寄存器地址0X6B)

DEVICE_RESET位用来控制复位,设置为1,复位 MPU6050,复位结束后,MPU硬件自动清零该位。
SLEEEP位用于控制MPU6050的工作模式,复位后,该位为 1,即进入了睡眠模式(低功耗),所以我们要清零该位,以进入正常工作模式。
TEMP_DIS用于设置是否使能温度传感器,设置为 0,则使能。最后CLKSEL[2:0]用于选择系统时钟源,一般设置CLKSEL=001即可。
(2) 陀螺仪配置寄存器(寄存器地址0X1B)

FS_SEL[1:0] 两个位是重点,用于设置陀螺仪的满量程范围:0,±250°/S; 1,±500°/S;2,±1000°/S;3,±2000°/S;我们一般设置为 3,即±2000°/S,因为陀螺仪的 ADC 为 16 位分辨率,所以得到灵敏度为:65536/4000=16.4LSB/(°/S)。
(3) 加速度传感器配置寄存器(寄存器地址0X1C)

AFS_SEL[1:0] 两个位是重点,用于设置加速度传感器的满量程范围:0, ±2g;1,±4g;2,±8g;3,±16g;我们一般设置为 0,即±2g,因为加速度传感器的ADC也是16位,所以得到灵敏度为:65536/4=16384LSB/g。
(4) FIFO 使能寄存器(寄存器地址0X23)
 该寄存器用于控制FIFO使能,在简单读取传感器数据的时候,可以不用FIFO,设置对应位为0即可禁止 FIFO,设置为1,则使能 FIFO。注意加速度传感器的3个轴,全由1个位(ACCEL_FIFO_EN)控制,只要该位置 1,则加速度传感器的三个通道都开启FIFO了。
该寄存器用于控制FIFO使能,在简单读取传感器数据的时候,可以不用FIFO,设置对应位为0即可禁止 FIFO,设置为1,则使能 FIFO。注意加速度传感器的3个轴,全由1个位(ACCEL_FIFO_EN)控制,只要该位置 1,则加速度传感器的三个通道都开启FIFO了。
(5) 陀螺仪采样率分频寄存器(寄存器地址0X19)

该寄存器用于设置 MPU6050 的陀螺仪采样频率,计算公式为:
采样频率=陀螺仪输出频率/ (1+SMPLRT_DIV)
(6) 陀螺仪数据输出寄存器(6 个寄存器组成,地址为:0X43~0X48)
通过读取这6个寄存器,就可以读到陀螺仪x/y/z轴的值,比如x轴的数据,可以通过读取0X43(高 8 位)和0X44(低 8 位)寄存器得到,其他轴以此类推。
(7) 加速度传感器数据输出寄存器(6 个寄存器组成,地址为:0X3B~0X40)
通过读取这 6 个寄存器,就可以读到加速度传感器x/y/z轴的值,比如读x轴的数据,可以通过读取0X3B(高8 位)和0X3C(低 8 位)寄存器得到,其他轴以此类推。
最后,温度传感器的值,可以通过读取0X41(高 8 位)和0X42(低 8 位)寄存器得到,温度换算公式为:Temperature = 36.53 + regval/340
其中,Temperature 为计算得到的温度值,单位为℃,regval为从0X41和0X42读到的温度传感器值。
4.DMP使用
当我们读出MPU6050的加速度传感器和角速度传感器的原始数据之后,可以通过MPU6050自带了数字运动处理器(DMP)可以将我们的原始数据,直接转换成四元数输出,而得到四元数之后,就可以很方便的计算出欧拉角,从而得到航向角(yaw)、横滚角(roll)和俯仰角(pitch)。
使用内置的 DMP,大大简化了四轴的代码设计,且 MCU 不用进行姿态解算过程,大大降低了 MCU 的负担,从而有更多的时间去处理其他事件,提高系统实时性。
二、硬件电路设计
MPU6050通过三根线与STM32F497ZGT6芯片连接,其中IIC总线接在PB8和PB9上面。MPU6050的中断输出连接在STM32F4的PC0脚,不过本例程我们并没有用到中断。另外,AD0 接的GND,所以MPU6050的器件地址是:0X68。连接原理图如图所示。

三、软件设计
1.CubeMX配置
(1) 时钟配置
如下图分别为设置HSE(高速外部时钟)以及时钟树的配置。选定HSE之后芯片会自动选定两个引脚用来连接外部晶振,如图5所示。设置LSE之后配置时钟树,设置HCLK为100MHz(也可以设置168MHz),其配置图如图所示。


(2) 调试接口配置
如图所示,将调试接口设置的设置为SW模式,占用芯片两个引脚。

(3) I2C配置
如图所示,在Connectivity中选择I2C1,会跳出右边的I2C1模式和配置。将I2C选项设置为I2C,其它选项例如SMBus,常用于智能电池的管理。
Master Features组为主设备参数,这里选择标准模式,时钟速度设为100kHz。
Slave Features组为从设备参数,五个选项分别为禁止时钟延长、设备主地址长度、双地址确认、从设备主地址和广播呼叫检测。按图中设置即可。本实验中采用的都是默认值。最后会为I2C引出两个引脚。

由于CubeMX中自动生成的SDA和SCL接口分别是PB7和PB6,本次实验所用到的借口是PB8和PB9,所以这里需要手动改变GPIO端口,直接在PB8和PB9引脚上面单击然后设置成SCL和SDA即可,操作步骤如下图所示。

(4) UART配置
为显示结果,用串口将转换结果传到电脑上,设置为异步模式,波特率为115200Bits/s,其UART配置如下图所示。设置完成之后会自动引出两个引脚用于串口通信。

(5) 芯片引脚使用情况
如图所示,本次设计一共用到了一组外部时钟源,一组调试接口,一组串口和I2C总线的SDA和SCL。通过SCL和SDA相互配合收发数据,由串口打印到上位机上显示。实验比较简单,也适用于其他芯片,学者也可以加更多的功能。

(6) 保存
在ProjectManager中设置如如图所示,设置集成开发环境为STM32CubeIDE。运用其他平台比如IAR,Keil也可以对应选择。


2.CubeIDE代码
(1) 添加MPU6050驱动
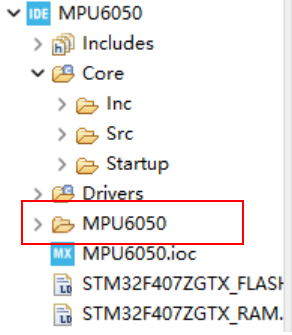
复制文件夹:首先将驱动文件添加到目标文件夹,如下图所示(驱动文件见附录)。

添加完成之后打开CubeIDE刷新,可以看到文件夹已被成功添加到路径。
添加文件路径:将路径添加至工程中,选择Project->Properties,然后按下图将路径添加至工程。

可以看到路径以及被添加至工程,最后单击Apply and Close即可。

添加源文件:单击工具栏中的New C/C++ Source Folder,如下图步骤1所示,弹出下图对话框,在对话框的Browse中添加文件夹,最后点击Finish即可。

至此,就已经将驱动文件添加至工程中。
相关配置文件不做过多解释,以下只展示添加的代码段以及相应的用法,其他代码均不用动。
(2) 头文件
作用:使用驱动文件MPU6050以及sprintf函数。
位置:位于/* USER CODE BEGIN Includes */沙箱内。
/* USER CODE BEGIN Includes */
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
#include "stdio.h"
/* USER CODE END Includes */
(3) 私有变量定义
作用:定义变量。
位置:位于/* USER CODE BEGIN PV */沙箱内。
/* USER CODE BEGIN PV */
float pitch,roll,yaw; //欧拉角
short aacx,aacy,aacz; //加速度传感器原始数据
short gyrox,gyroy,gyroz; //陀螺仪原始数据
float temp; //温度
uint32_t aTxBuffer[30]; //声明sprintf的存储数组
/* USER CODE END PV */
(4) 预处理
作用:测试UART以及初始化MPU6050。
位置:位于 /* USER CODE BEGIN 2 */沙箱内。
/* USER CODE BEGIN 2 */
HAL_UART_Transmit(&huart1, "UART1 Ready!\r\n", sizeof("UART1 Ready!\r\n"),200);
while(MPU_Init()); //初始化MPU6050
while(mpu_dmp_init())
{
HAL_Delay(200);
HAL_UART_Transmit(&huart1, "MPU6050 Init Wrong!\r\n", sizeof("MPU6050 Init Wrong!\r\n"),200);
}
HAL_UART_Transmit(&huart1, "MPU6050 Init OK!\r\n", sizeof("MPU6050 Init OK!\r\n"),200);
/* USER CODE END 2 */
(5) 主函数
作用:得到欧拉角,温度,以及其他数据并且通过串口打印到上位机。
位置:位于 /* USER CODE BEGIN WHILE */沙箱内。
/* USER CODE BEGIN WHILE */
while (1)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
temp=MPU_Get_Temperature();
temp=temp/100.0; //得到温度
MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据
sprintf(aTxBuffer,"Euler Angle:pitch= %f , roll= %f , yaw= %f .\r\n", pitch,roll,yaw);
HAL_UART_Transmit(&huart1,aTxBuffer,strlen((const char*)aTxBuffer),200); //打印欧拉角
// sprintf(aTxBuffer,"Accelerometer Raw Data:aacx= %d , aacy= %d , aacz= %d .\r\n", aacx,aacy,aacz);
// HAL_UART_Transmit(&huart1,aTxBuffer,strlen((const char*)aTxBuffer),200); //打印加速度传感器数据
//
// sprintf(aTxBuffer,"Gyroscope Raw Data:gyrox= %d , gyroy= %d , gyroz= %d .\r\n", gyrox,gyroy,gyroz);
// HAL_UART_Transmit(&huart1,aTxBuffer,strlen((const char*)aTxBuffer),200); //打印陀螺仪数据
sprintf(aTxBuffer,"The current temperature= %f .\r\n", temp);
HAL_UART_Transmit(&huart1,aTxBuffer,strlen((const char*)aTxBuffer),200); //打印温度
HAL_UART_Transmit(&huart1, "\r\n", sizeof("\r\n"),200);
}
HAL_Delay(100);
/* USER CODE END WHILE */
3.结果显示
如图,将开发板倾斜一个角度,可以看到串口所接收到的数据在随着角度而改变。


附:串口若接收不到浮点数是由于软件中需要设置。在Project中选择properties然后根据图操作勾选对应浮点项即可

总结
本篇文章只是对六轴传感器做一个简单的测试,通过本次设计可以了解到六轴传感器的工作原理。由于I2C相关的代码都在驱动中写好,所以只要调用相应的函数即可,并不需要自己编写过于复杂的代码,如果有新区可以看一看驱动代码,会进一步加深对I2C的理解。本次设计参考正点原子探索者开发板以及STM32Cube高效开发教程。
附录
(1)驱动文件
链接:https://pan.baidu.com/s/1hEQS-EriDfEi8YLbNMP1RA
提取码:zy1j
(2) 完整代码
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "i2c.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
float pitch,roll,yaw; //欧拉角
short aacx,aacy,aacz; //加速度传感器原始数据
short gyrox,gyroy,gyroz; //陀螺仪原始数据
float temp; //温度
uint32_t aTxBuffer[30]; //声明sprintf的存储数组
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Transmit(&huart1, "UART1 Ready!\r\n", sizeof("UART1 Ready!\r\n"),200);
while(MPU_Init()); //初始化MPU6050
while(mpu_dmp_init())
{
HAL_Delay(200);
HAL_UART_Transmit(&huart1, "MPU6050 Init Wrong!\r\n", sizeof("MPU6050 Init Wrong!\r\n"),200);
}
HAL_UART_Transmit(&huart1, "MPU6050 Init OK!\r\n", sizeof("MPU6050 Init OK!\r\n"),200);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
temp=MPU_Get_Temperature();
temp=temp/100.0; //得到温度
MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据
MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据
sprintf(aTxBuffer,"Euler Angle:pitch= %f , roll= %f , yaw= %f .\r\n", pitch,roll,yaw);
HAL_UART_Transmit(&huart1,aTxBuffer,strlen((const char*)aTxBuffer),200); //打印欧拉角
// sprintf(aTxBuffer,"Accelerometer Raw Data:aacx= %d , aacy= %d , aacz= %d .\r\n", aacx,aacy,aacz);
// HAL_UART_Transmit(&huart1,aTxBuffer,strlen((const char*)aTxBuffer),200); //打印加速度传感器数据
//
// sprintf(aTxBuffer,"Gyroscope Raw Data:gyrox= %d , gyroy= %d , gyroz= %d .\r\n", gyrox,gyroy,gyroz);
// HAL_UART_Transmit(&huart1,aTxBuffer,strlen((const char*)aTxBuffer),200); //打印陀螺仪数据
sprintf(aTxBuffer,"The current temperature= %f .\r\n", temp);
HAL_UART_Transmit(&huart1,aTxBuffer,strlen((const char*)aTxBuffer),200); //打印温度
HAL_UART_Transmit(&huart1, "\r\n", sizeof("\r\n"),200);
}
HAL_Delay(100);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 100;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */















 1587
1587











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









