






博客与论文原文
论文:Steiner K ,Irnich S .Strategic Planning for Integrated Mobility-on-Demand and Urban Public Bus Networks[J].Transportation Science,2020,54(6):1616-1639.
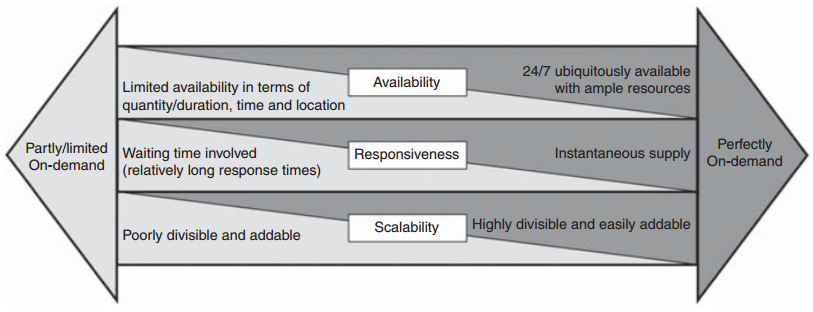
按需服务(On-Demand Services)是一种基于用户实时需求提供个性化服务的模式。这种服务模式利用现代技术和数据分析来响应用户的即时请求,从而提供更高效、灵活的服务体验。按需服务通常依赖于移动应用程序、在线平台或其他数字工具来实现服务的即时调度和管理。按需服务有以下特征:
- 高度实用性(Availability)
- 响应性(Responsiveness)
- 可拓展性(Scalability)
按需服务涉及生活的方方面面,其能够快速响应用户的请求,并且用户可以根据不同的需求进行个性化定制服务。随着互联网技术的快速发展,现阶段的按需服务通常依赖于先进的技术,如移动互联网、人工智能、数据分析和自动化系统,以优化服务过程和提升效率。值得注意得是:按需出行也属于按需服务的范畴。
- 交通出行:打车服务:如滴滴出行、Uber、Lyft等,通过移动应用程序实时调度出租车或私人车辆,根据用户的位置信息和需求提供服务。共享出行:如共享单车、共享汽车,用户可以随时租用共享交通工具,按需使用。
- 食品配送: 餐饮外卖:如达美乐、饿了么、美团外卖,用户可以在线下单,系统根据订单和位置安排配送员,提供快速送餐服务。
按需服务continuum图
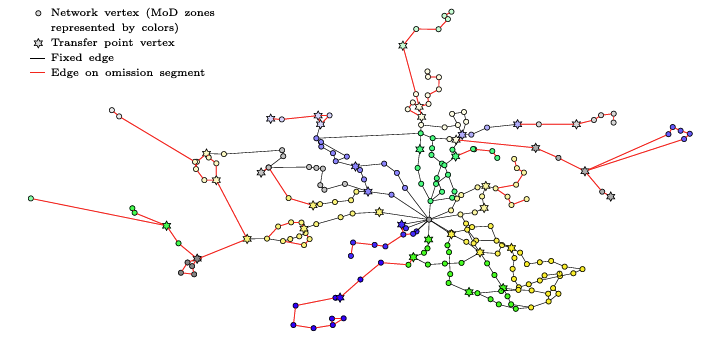
按需出行也属于按需服务的范畴。实践表明:基于网络的综合交通系统框架中,将传统公共交通与按需出行(MoD)系统相结合可以提高出行需求密度较低地区运行效率,提供较短的行程时间。这也证实了本文的方法,即在需求密度较低的地区,将MoD视为固定线路服务的有效替代方案,如整合按需出行与城市公交网络示意图所示。
0.引言
传统城市交通规划通常假设在机动车个人交通和公共交通两种主要模式之间进行划分。然而,随着按需出行服务的兴起,尤其是Uber和Lyft等公司提供的网约车服务,一种介于传统交通模式之间的新型交通方式逐渐出现。尽管这种模式对城市交通体系的长期影响尚不明确,但它已显示出减少私家车依赖、提升公共交通接驳效率的巨大潜力,特别是在需求较低或非高峰时段,按需出行服务可能比传统公共交通更具吸引力和经济性。这促使国际公共交通协会(UITP)提出“数字平台”计划,旨在为按需出行服务提供者如Door2Door,Citymapper和Uber等搭建合作框架。按需出行的崛起也带来了对传统公共交通收入减少的担忧,按需出行服务颠覆整个行业的第一个典型案例是出租车行业,自从新的竞争者出现后,出租车行业的收入显著下降。
在设计包含按需出行综合公交线网时,最基本的问题是需要哪些决策变量以及它们之间的依赖关系。我们的优化模型决策了以下四个方面:
- 未来的固定路线网络中使用现有的公交线路或路段(Decisions on the Existing Public Transport Network);
- 提供按需出行服务的区域(Decisions on Zone-Based MoD Services);
- 按需出行如何通过换乘点与固定公交网络形成交互(Decisions on Transfer Points);
- 乘客路线(Decisions on Passenger Routes)。
模型整合了按需出行与现有公共交通网络。文中假设有一个中央规划者(公共当局或交通运营者),可以调整公共交通网络结构。中央规划者的目标是最小化总体运营成本(包括按需出行服务),并确保乘客服务水平与现有网络相当。
1.整合按需出行的多式联运网络优化模型
1.1.符号简介
- 公共交通网络的顶点和边缘
k , l ∈ V k,l\in{V} k,l∈V:表示旅客旅行起点和目的地的顶点;
( k , l ) ∈ O D ⊂ V × V i , j ∈ W \begin{aligned}&(k,l)\in OD\subset {V}\times V\\&i,j\in W\end{aligned} (k,l)∈OD⊂V×Vi,j∈W:起点-目的地(OD)对的集合,代表公共交通网络当前站点的顶点;假设V和W是不相交的,即使一些顶点可能指向相同的物理位置;
e ∈ C ( W ) e\in\mathscr{C}(W) e∈C(W):代表当前公共交通网络的直接连接(两个连续站点)的边缘(两个端点都为0);
s ∈ S ⊂ 2 C ( W ) s\in\mathscr{S}\subset2^{\mathscr{C}({W})} s∈S⊂2C(W):边缘的成对不相交段,代表网络中可以被移除的部分;
- 基于分区的按需出行服务
z ∈ L z\in\mathscr{L} z∈L: 覆盖范围内不相交MOD区域,对于每一个 k ∈ V k\in\ {V} k∈ V,有唯一的区域 z k ∈ L z_{k}\in\mathscr{L} zk∈L;
T z ⊂ W \mathscr{T}_{z}\subset W Tz⊂W: 每个区域 z z z的潜在转移点集合 T z \mathscr{T}_{z} Tz;
( k , i ) , ( j , l ) ∈ E ( W , V ) (k,i),(j,l)\in\mathscr{E}(W,V) (k,i),(j,l)∈E(W,V) :边(一个端点在W,一个端点在V),代表入口 ( k , i ) (k,i) (k,i)和出口 ( j , l ) (j,l) (j,l); E ( W , V ) \mathscr{E}(W,V) E(W,V)表示 E ( W , V ) w a l k \mathscr{E}(W,V)^{walk} E(W,V)walk和 E ( W , V ) M O D \mathscr{E}(W,V)^{MOD} E(W,V)MOD的不相交集;
- 基于路径公式中的需求和成本系数
d k l \begin{aligned}&d^{kl}\end{aligned} dkl:根据OD关系 ( k , l ) ∈ O D (k,l)\in OD (k,l)∈OD(基本需求)出行的乘客人数;
d z i l \begin{aligned}&d_{zil}\end{aligned} dzil:若提供转移点 I ∈ T z I I \in \mathscr{T}_{z}^{\mathscr{I}} I∈TzI,则在区域 z ∈ L z\in\mathscr{L} z∈L内的额外诱导需求可通过提供 i ∈ T z i\in\mathscr{T}_{z} i∈Tz生成;
c P k l k l \begin{aligned}&c_{P^{kl}}^{kl}\end{aligned} cPklkl:从 k ∈ V k\in\ {V} k∈ V到 l ∈ V l\in\ {V} l∈ V的直接MOD行程运送乘客的可变成本;
c s \begin{aligned}&c_{s}\end{aligned} cs:在删除段 s ∈ S s\in\mathscr{S} s∈S上运行预定频率公交的成本;
c z l f i x \begin{aligned}&c_{zl}^{\mathrm{fix}}\end{aligned} czlfix:区域 z ∈ L z\in\mathscr{L} z∈L内运营MOD和使用转移点 I ∈ T z I I \in \mathscr{T}_{z}^{\mathscr{I}} I∈TzI的基础设施和其他固定成本;
C z i I \mathcal{C}_{ziI} CziI:满足额外需求 d z i I d_{ziI} dziI的单位乘客成本;
r z i l \begin{aligned}&r_{zil}\end{aligned} rzil:满足额外需求 d z i I d_{ziI} dziI的单位乘客收入;
c k i c^{ki} cki:从 k ∈ V k\in{V} k∈V到 i ∈ T z k i\in\mathscr{T}_{z_k} i∈Tzk,通过MOD运乘客的可变成本(反之亦然);
c z l i n e f f \begin{aligned}&c_{zl}^{\mathrm{ineff}}\end{aligned} czlineff:在区域 z ∈ L z\in\mathscr{L} z∈L 使用转移点 I ∈ T z I I \in \mathscr{T}_{z}^{\mathscr{I}} I∈TzI运送乘客的低效成本,由于当转移点较多或分散时,MOD的运行效率会下降;
c p k l \begin{aligned}&c_{p}^{kl}\end{aligned} cpkl:从 k ∈ V k\in\ {V} k∈ V到 l ∈ V l\in\ {V} l∈ V的行程 P ∈ P k l P\in\mathscr{P}^{kl} P∈Pkl运送乘客的可变成本;
c z l \begin{aligned}&c_{zl}\end{aligned} czl: MOD区域内选定转移点的总成本;
- 决策变量
x s ∈ { 0 , 1 } x_s\in\{0,1\} xs∈{0,1}:表示删除的部分 s ∈ S s\in\mathscr{S} s∈S被包含(=1)在未来的网络中,否则(=0);
y z I ∈ { 0 , 1 } y_{zI}\in\{0,1\} yzI∈{0,1}: 表示 I ∈ T z I I \in \mathscr{T}_{z}^{\mathscr{I}} I∈TzI是否是MOD区域 z ∈ L z\in\mathscr{L} z∈L的集合;
λ P k l ∈ { 0 , 1 } \lambda_P^{kl}\in\{0,1\} λPkl∈{0,1}: 表示是否路径 P ∈ P k l P\in\mathscr{P}^{kl} P∈Pkl被一个OD对 ( k , l ) ∈ O D (k,l)\in OD (k,l)∈OD选择;
1.2.基于路径的基础模型
本文构建了基于路径的模型,包括正在审查的固定线路网络部分的运营成本,以及基于区域、换乘点设置和乘客路径的决策而调整的可变成本和固定成本。
min
∑
s
∈
S
c
s
x
s
+
∑
z
∈
L
∑
I
∈
T
z
I
c
z
I
y
z
I
+
∑
(
k
,
l
)
∈
O
D
d
k
l
∑
P
∈
P
k
l
c
P
k
l
λ
P
k
l
\min\sum_{s\in\mathscr{S}}c_{s}x_{s}+\sum_{z\in\mathscr{L}}\sum_{I\in \mathscr{T}_{z}^{\mathscr{I}}}c_{zI}y_{zI}+\sum_{(k,l)\in OD}d^{kl}\sum_{P\in\mathscr{P}^{kl}}c_{P}^{kl}\lambda_{P}^{kl}
mins∈S∑csxs+z∈L∑I∈TzI∑czIyzI+(k,l)∈OD∑dklP∈Pkl∑cPklλPkl
s
.
t
.
∑
I
∈
T
z
I
y
z
I
≤
1
,
∀
z
∈
L
s.t.\sum_{I\in \mathscr{T}_{z}^{\mathscr{I}}}y_{zI}\leq1,\quad\forall z\in\mathscr{L}
s.t.I∈TzI∑yzI≤1,∀z∈L
∑
P
∈
P
k
l
λ
P
k
l
=
1
,
∀
(
k
,
l
)
∈
O
D
\sum_{P\in\mathscr{P}^{kl}}\lambda_{P}^{kl}=1,\quad\forall(k,l)\in OD
P∈Pkl∑λPkl=1,∀(k,l)∈OD
∑
P
∈
P
s
k
l
λ
P
k
l
≤
x
s
,
∀
s
∈
S
,
∀
(
k
,
l
)
∈
O
D
\sum_{P\in\mathscr{P}_{s}^{kl}}\lambda_{P}^{kl}\leq x_{s},\quad\forall s\in\mathscr{S},\forall(k,l)\in OD
P∈Pskl∑λPkl≤xs,∀s∈S,∀(k,l)∈OD
∑
P
∈
P
k
l
:
i
p
=
i
,
(
k
,
i
)
∈
E
(
V
,
W
)
M
O
D
λ
P
k
l
≤
∑
I
∈
T
z
I
:
i
∈
I
y
z
k
I
,
∀
(
k
,
l
)
∈
O
D
,
∀
i
∈
T
z
k
\begin{aligned}&\sum_{P\in\mathscr{P}^{kl}:i_{p}=i,\\(k,i)\in\mathscr{E}({V},{W})^{MOD}}\lambda_{P}^{kl}\leq\sum_{I\in \mathscr{T}_{z}^{\mathscr{I}}:i\in I}y_{z_{k}I},\quad\forall(k,l)\in OD,\forall i\in\mathscr{T}_{z_{k}}\end{aligned}
P∈Pkl:ip=i,(k,i)∈E(V,W)MOD∑λPkl≤I∈TzI:i∈I∑yzkI,∀(k,l)∈OD,∀i∈Tzk
∑
P
∈
P
k
l
:
j
p
=
j
,
(
j
,
l
)
∈
E
(
V
,
W
)
M
O
D
λ
P
k
l
≤
∑
I
∈
T
z
I
:
j
∈
I
y
z
l
I
,
∀
(
k
,
l
)
∈
O
D
,
∀
j
∈
T
z
l
\sum_{P\in\mathscr{P}^{kl}:j_{p}=j,(j,l)\in\mathscr{E}(V,W)^{MOD}}\lambda_{P}^{kl}\leq\sum_{I\in \mathscr{T}_{z}^{\mathscr{I}}:j\in I}y_{z_{l}I}, \forall(k,l)\in OD,\forall j\in\mathscr{T}_{z_{l}}
P∈Pkl:jp=j,(j,l)∈E(V,W)MOD∑λPkl≤I∈TzI:j∈I∑yzlI,∀(k,l)∈OD,∀j∈Tzl
λ
P
d
i
r
k
l
k
l
≤
∑
I
∈
T
z
I
y
z
I
,
∀
(
k
,
l
)
∈
O
D
,
∀
z
∈
H
:
z
=
z
k
o
r
z
=
z
l
\lambda_{P_{\mathrm{dir}}^{kl}}^{kl}\leq\sum_{I \in \mathscr{T}_{z}^{\mathscr{I}}}y_{zI},\quad\forall(k,l)\in OD,\forall z\in\mathcal{H}:z=z_{k}\mathrm{~or~}z=z_{l}
λPdirklkl≤I∈TzI∑yzI,∀(k,l)∈OD,∀z∈H:z=zk or z=zl
x
s
∈
{
0
,
1
}
x_{s}\in\{0,1\}
xs∈{0,1}
∀
s
∈
S
\forall s\in\mathscr{S}
∀s∈S
y
z
I
∈
{
0
,
1
}
y_{zI}\in\{0,1\}
yzI∈{0,1}
∀
z
∈
L
,
∀
I
∈
T
z
I
\forall z\in\mathscr{L},\forall I\in\mathscr{T}_{z}^{\mathscr{I}}
∀z∈L,∀I∈TzI
λ P k l ∈ { 0 , 1 } \lambda_P^{kl}\in\{0,1\} λPkl∈{0,1} ∀ ( k , l ) ∈ O D , ∀ P ∈ P k l \forall(k,l)\in OD,\forall P\in\mathscr{P}^{kl} ∀(k,l)∈OD,∀P∈Pkl
目标函数包括正在审查的固定线路网络部分的运营成本,以及基于区域、换乘点设置和乘客路径的决策来调整可变成本和固定成本;约束1保证了最多选择一个子集 I ∈ T z I I\in\mathscr{T}_{z}^{\mathscr{I}} I∈TzI;约束条件2保证为每个OD对选择通过网络的路径;约束3表示所选择的路径需要与包含段的选择一致;约束4和5表示与MoD区域和传输点的选择一致;约束6确保只有在始发区和目的地区都提供MoD时才能实现直接MoD旅行;变量的定义域约束7 -9表示。
1.3.动态需求和按需出行成本
现在更详细地讨论所有剩余的重要需求、成本和时间方面,特别是:
- 每个区域的MoD基础设施成本
对于区域内的基础设施成本和相关的投资成本取决于所选择的转移点,因此引入固定成本 c z I f i x c_ {zI}^{\mathrm{fix}} czIfix对于任何区域 z ∈ L z\in\mathscr{L} z∈L和区域内的转移点 I ∈ T z I I \in \mathcal{T}_ {z}^{\mathscr{I}} I∈TzI。
- 与基于区域的诱导需求相关的按需出行成本
本文将出行需求分为基础需求和诱导需求,基础需求为网络已经存在的需求,为了简化模型我们预先计算每个MOD区域 z z z和集合 I I I转移点 i i i的组合诱导需求 d z i I d_{ziI} dziI,产生的负面影响可通过 d z i I d_ {ziI} dziI的负值表示。需求 d z i I d_{ziI} dziI被模型刻画之后,额外的成本 C z i I \mathcal{C}_ {ziI} CziI和收入参数 r z i I r_{ziI} rziI被计算并包含在模型中
- 基础需求的按需出行支路成本
按需服务的成本在很大程度上取决于服务的乘客数量。因此,我们可以定义:
c
P
k
l
=
c
k
i
P
+
c
l
j
P
c_P^{kl}=c^{ki_P}+c^{lj_P}
cPkl=ckiP+cljP
定义成本参数为:
c
z
I
=
(
c
z
I
f
i
x
+
c
z
I
i
n
e
f
f
)
+
∑
i
∈
I
(
c
z
i
I
−
r
z
i
I
)
d
z
i
I
c_{zI}=\begin{pmatrix}c_{zI}^{\mathrm{fix}}+c_{zI}^{\mathrm{ineff}}\end{pmatrix}+\sum_{i\in I}(c_{ziI}-r_{ziI})d_{ziI}
czI=(czIfix+czIineff)+i∈I∑(cziI−rziI)dziI
每一个OD对被服务由路径
P = ( k , i P , j P , l ) ∈ P k l ∖ { P d i r k l } P=(k,i_{P},j_{P},l)\in\mathscr{P}^{kl}\setminus\{P_{\mathrm{dir}}^{kl}\} P=(k,iP,jP,l)∈Pkl∖{Pdirkl}
- 产生的乘客旅行时间
本文中假设该模型可以与更多的基于MOD系统而设计的操作模型结合使用,操作模型的输入作为基于路径的战略模型的输入参数,这样保证了模型的灵活性。
2.求解方法
本文的使用以下两种方法对模型进行求解:(1)分支定价算法动态生成路径;(2)枚举所有相关路径,使用求解器CPLEX求解基于路径的模型,注意我们将第二种方法称为增强的枚举算法。
2.1.分支定价算法
2.1.1.子问题
我们将
(
k
,
l
)
∈
O
D
(k,l)\in OD
(k,l)∈OD的定价问题求解为具有资源约束的最短路径问题(SPPRC),我们最小化reduced costs的同时考虑对总行程时间的约束。
对于每一个OD对,必须确定路径
P
∈
P
k
l
P\in\mathscr{P}^{kl}
P∈Pkl降低了成本
c
~
P
\tilde{c}^{P}
c~P,
(
k
,
l
)
(k,l)
(k,l)的定价子问题如下所示:
min
P
∈
P
k
l
c
~
P
=
min
P
∈
P
k
l
(
c
k
i
P
+
c
l
j
P
)
d
k
l
−
γ
k
l
−
∑
s
∈
S
:
P
∈
P
s
k
l
δ
s
k
l
−
ϵ
i
P
k
l
−
ζ
j
P
k
l
\min_{P\in\mathscr{P}^{kl}}\tilde{c}^{P}= \min_{P\in\mathscr{P}^{kl}}\bigl(c^{ki_{P}}+c^{lj_{P}}\bigr)d^{kl}-\gamma^{kl}-\sum_{s\in\mathscr{S}:P\in\mathscr{P}_{s}^{kl}}\delta_{s}^{kl}-\epsilon_{i_{P}}^{kl}-\zeta_{j_{P}}^{kl}
P∈Pklminc~P=P∈Pklmin(ckiP+cljP)dkl−γkl−s∈S:P∈Pskl∑δskl−ϵiPkl−ζjPkl
2.1.1.1.关于 Reduced-Cost 计算
SPPRC-1: 引入额外资源,每个删除段 s ∈ S s\in \mathscr{S} s∈S各一个
SPPRC-2:修改模型中的约束3为 ∑ P ∈ P k l n s P ⋅ λ P k l ≤ ∣ s ∣ ⋅ x s , ∀ s ∈ S , ∀ ( k , l ) ∈ O D \sum_{P\in\mathscr{P}^{kl}}n_{s}^{P}\cdot\lambda_{P}^{kl}\leq|s|\cdot x_{s},\quad\forall s\in\mathscr{S},\forall(k,l)\in OD ∑P∈PklnsP⋅λPkl≤∣s∣⋅xs,∀s∈S,∀(k,l)∈OD
在第一种情况下,为每个删除段
s
∈
S
s\in\mathscr{S}
s∈S引入额外的二进制资源。资源
s
s
s表示段
s
s
s没有被部分路径(= 1)访问过。资源初始化为1。一旦第一次遍历相应段的边缘,拓展集合将其设置为零。(成本拓展和标签优势的影响将在后面讨论)
∑
P
∈
P
k
l
n
s
P
⋅
λ
P
k
l
≤
∣
s
∣
⋅
x
s
,
∀
s
∈
S
,
∀
(
k
,
l
)
∈
O
D
\sum_{P\in\mathscr{P}^{kl}}n_{s}^{P}\cdot\lambda_{P}^{kl}\leq|s|\cdot x_{s},\quad\forall s\in\mathscr{S},\forall(k,l)\in OD
P∈Pkl∑nsP⋅λPkl≤∣s∣⋅xs,∀s∈S,∀(k,l)∈OD
其中,
n
s
P
n_{s}^P
nsP表示
s
s
s中被
P
{P}
P使用的次数,
∣
s
∣
\left|s\right|
∣s∣是边
s
s
s中的边总数量。
替换之后定价子问题修改如下:
c
~
P
=
(
c
k
i
P
+
c
l
j
P
)
d
k
l
−
γ
k
l
−
∑
s
∈
S
n
s
P
δ
s
k
l
−
ϵ
i
P
k
l
−
ζ
j
P
k
l
\tilde{c}^P=\left(c^{ki_P}+c^{lj_P}\right)d^{kl}-\gamma^{kl}-\sum_{s\in\mathscr{S}}n_s^P\delta_s^{kl}-\epsilon_{i_P}^{kl}-\zeta_{j_P}^{kl}
c~P=(ckiP+cljP)dkl−γkl−s∈S∑nsPδskl−ϵiPkl−ζjPkl
2.1.1.2.标签算法
每个 ( k , l ) ∈ O D (k,l)\in OD (k,l)∈OD对应一个定价问题,使用SPPRC标记算法解决。使用以下属性:
T c o s t T^{cost} Tcost:累计的reduced cost;
T t i m e T^{time} Ttime:累计旅行实践;
T o m − s e g , s T^{\mathrm{om-seg,s}} Tom−seg,s:对于每个 s ∈ S s\in\mathscr{S} s∈S,表示未访问删除段 (om-seg) s s s的二进制属性。
SPPRC-1使用所有属性,SPPRC-2仅使用前两个属性
在这两种情况下,起始顶点 k ( 1 ) k^{(1)} k(1)是 ( T c o s t , T t i m e , ( T o m − s e g , s ) ) = ( 0 , 0 , ( 1 ) ) (T^{cost},T^{time},(T^{\mathrm{om-seg,s}}))=(0,0,(1)) (Tcost,Ttime,(Tom−seg,s))=(0,0,(1))
在SPPRC-1中,沿弧线
(
v
,
w
)
(v,w)
(v,w)资源扩展函数为:
T
w
c
o
s
t
=
T
v
c
o
s
t
+
{
0
,
if
(
v
,
w
)
=
(
i
(
3
)
,
j
(
3
)
)
∈
s
for some
s
∈
S
and
T
v
om-seg,
s
=
0
,
c
~
v
w
,
otherwise
,
T_w^{cost}=T_v^{cost}+\begin{cases}0,&\text{if} (v,w)=\left(i^{(3)},j^{(3)}\right)\in s \text {for some}\\&s\in\mathscr{S}\text{and} T_v^{\text{om-seg,}s}=0,\\\tilde{c}_{vw},&\text{otherwise},\end{cases}
Twcost=Tvcost+⎩
⎨
⎧0,c~vw,if(v,w)=(i(3),j(3))∈sfor somes∈SandTvom-seg,s=0,otherwise,
T
w
t
i
m
e
=
T
v
t
i
m
e
+
t
v
w
,
T
w
o
m
−
s
e
g
,
s
=
{
0
,
if
(
v
,
w
)
=
(
i
(
3
)
,
j
(
3
)
)
∈
s
T
v
o
m
−
s
e
g
,
s
,
otherwise
for all
s
∈
S
\begin{aligned}T_{w}^{time}&=T_{v}^{time}+t_{vw} ,\\T_{w}^{\mathrm{om-seg},s}&=\begin{cases}0,&\text{if}\left(v,w\right)=\left(i^{(3)},j^{(3)}\right)\in s\\T_{v}^{\mathrm{om-seg},s},&\text{otherwise}&\text{for all} s\in\mathscr{S}\end{cases}\end{aligned}
TwtimeTwom−seg,s=Tvtime+tvw,={0,Tvom−seg,s,if(v,w)=(i(3),j(3))∈sotherwisefor alls∈S
新标签
T
w
T_w
Tw是可行的如果:
T
w
t
i
m
e
≤
T
max
T_w^{time}\leq T^{\max}
Twtime≤Tmax
其中
T
max
T^{\max}
Tmax为行程时间的上界,另一个有用的观察是,只有弧线
(
k
(
1
)
,
i
(
2
)
)
(k^{(1)},i^{(2)})
(k(1),i(2))对于支路可以有一个负的降低成本,因为双重价格满足
δ
s
k
l
,
ϵ
i
k
l
\delta_{s}^{kl},\epsilon_{i}^{kl}
δskl,ϵikl和
ζ
j
k
l
≤
0
\zeta_{j}^{kl}\leq0
ζjkl≤0,因此带有正的总reduced costs可以丢弃,可将约束
T
w
c
o
s
t
<
0
T_w^{cost}<0
Twcost<0加入到公式
T
w
t
i
m
e
≤
T
max
T_w^{time}\leq T^{\max}
Twtime≤Tmax中。
相比之下,SPPRC-2的资源拓展为直接相加,即 T w c o s t = T v c o s t + c ~ v w T_{w}^{cost}=T_{v}^{cost}+\tilde{c}_ {vw} Twcost=Tvcost+c~vw和 T w t i m e = T v t i m e + t v w T_{w}^{time}=T_{v}^{time}+t_{vw} Twtime=Tvtime+tvw
支配规则是SPPRC标记算法的关键组成部分。对于SPPRC-2,如果标签
T
1
T_1
T1在其减少成本和累积旅行时间属性上不大于
T
2
T_2
T2,则标签
T
1
T_1
T1优于另一个标签
T
2
T_2
T2(两者必须位于同一顶点)。如果保留主导标签,则可以丢弃主导标签。对于SPPRC-1,支配规则为:
T
1
c
o
s
t
−
∑
s
∈
S
:
T
1
o
m
s
e
g
,
S
=
1
,
δ
S
k
l
≤
T
2
c
o
s
t
T
2
o
m
s
e
g
,
S
=
0
T_1^{cost}-\sum_{s\in\mathscr{S}:T_1^{\mathrm{om}\mathrm{seg},S}=1,}\delta_S^{kl}\leq T_2^{cost}\\T_2^{\mathrm{om}\mathrm{seg},S}=0
T1cost−s∈S:T1omseg,S=1,∑δSkl≤T2costT2omseg,S=0且
T
1
t
i
m
e
≤
T
2
t
i
m
e
T_1^{time}\leq T_2^{time}
T1time≤T2time
第一个条件允许标签
T
1
T_1
T1在某些删除段
s
∈
S
s\in\mathscr{S}
s∈S的访问量上优于标签
T
2
T_2
T2。然而,降低后的成本
T
1
c
o
s
t
T_1^{cost}
T1cost必须比
T
2
c
o
s
t
T_2^{cost}
T2cost更小(注意
δ
s
k
l
≤
0
\delta_{s}^{kl}\leq0
δskl≤0成立)。
2.1.2.分支策略
本文使用两级分支方案:
在第一层,二进制段变量 x s x_{s} xs是固定的,因为这些变量预先确定了通过网络的哪些路径是可能的,以及哪些地方需要MoD。优先考虑当前网络中通过 s {s} s的流量最大的段变量 x s x_{s} xs。
在第二层,删除段是固定的,我们在二进制MoD变量 y z I y_{zI} yzI上进行分支。变量选择规则优先考虑值最接近0.5的MoD变量 y z I y_{zI} yzI。
2.2.增强的枚举算法
本文提出一种基于枚举的解决方法,该方法直接使用IP求解器对模型(1)直接求解。实际枚举的结果是忽略标签之间的任何优势。
3.小结
这篇文章主要提出了一个用于公共交通战略网络规划的优化模型,该模型允许将按需出行方式作为出行的第一或最后一段,并且捕捉了动态需求和乘客路径规划等重要方面。
- 模型方面,考虑到这是包括MoD在内的多式联运网络综合规划的早期步骤,需要在多个建模和算法方面进行进一步的研究。模型目标可以扩展到明确地涵盖对旅行时间的影响,并考虑成本-服务的权衡。此外,与MOD相关的方面可以用更高层次的细节进行建模,例如,与更复杂的需求模型相连接,这些需求模型确定了OD层次上的诱导需求。
- 求解方面,本文提出了一种混合精确算法将branch-and-price和枚举算法的结合,首先检查增强的枚举是否可行,否则应用branch-and-price方法,在案例上表现最优。
关于分支定价算法中OD对 ( k , l ) ∈ O D (k,l)\in OD (k,l)∈OD的价格有向图的弧及其降低的成本和旅行时间可参考原文table 6。
参考文献
[1] Steiner K ,Irnich S .Strategic Planning for Integrated Mobility-on-Demand and Urban Public Bus Networks[J].Transportation Science,2020,54(6):1616-1639.
[2]Burg D V J R ,Ahaus K ,Wortmann H , et al.Investigating the on-demand service characteristics: an empirical study[J].Journal of Service Management,2019,30(6):739-765.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









