







目录
上一篇的写文章-CSDN创作中心实例代码做了一点点小改动可以直接下载代码烧录:阿里云盘分享。
实现内网穿透的前提的拥有一台云服务器,这里博主是学生白嫖了阿里云七个月的云服务器,就教大家怎么使用自己的云服务器实现内网穿透。
也可以借助其他平台免费实现,简单好用参考如下:
ESP32-CAM——内网穿透教程_esp32cam_嵌入式创客工坊的博客-CSDN博客
ESP32-S3搭建外网可访问的网络摄像头(内网穿透)_esp32 网络摄像头-CSDN博客
这里就举例两篇啦,博主使用过都能成功。但是作为一个学习者,还是想自己动手实现一下,最后也成功的添加进了homeasstant中,折腾几天的结果如下。
第一步:修改代码(可点击上面的阿里云盘分享直接下载)
代码修改如下:
/*
Board: AI-Thinker ESP32-CAM or ESP-EYE
Compile as:
ESP32 Dev Module
CPU Freq: 240
Flash Freq: 80
Flash mode: QIO
Flash Size: 4Mb
Patrition: Minimal SPIFFS
PSRAM: Enabled
*/
// ESP32 has two cores: APPlication core and PROcess core (the one that runs ESP32 SDK stack)
#define APP_CPU 1
#define PRO_CPU 0
#include "OV2640.h"
#include <WiFi.h>
#include <WebServer.h>
#include <WiFiClient.h>
#include <esp_bt.h>
#include <esp_wifi.h>
#include <esp_sleep.h>
#include <driver/rtc_io.h>
// Select camera model
//#define CAMERA_MODEL_WROVER_KIT
//#define CAMERA_MODEL_ESP_EYE
//#define CAMERA_MODEL_M5STACK_PSRAM
//#define CAMERA_MODEL_M5STACK_WIDE
#define CAMERA_MODEL_AI_THINKER
#include "camera_pins.h"
/*
Next one is an include with wifi credentials.
This is what you need to do:
1. Create a file called "home_wifi_multi.h" in the same folder OR under a separate subfolder of the "libraries" folder of Arduino IDE. (You are creating a "fake" library really - I called it "MySettings").
2. Place the following text in the file:
#define SSID1 "replace with your wifi ssid"
#define PWD1 "replace your wifi password"
3. Save.
Should work then
*/
#include "home_wifi_multi.h"
OV2640 cam;
WebServer server(80);
// ===== rtos task handles =========================
// Streaming is implemented with 3 tasks:
TaskHandle_t tMjpeg; // handles client connections to the webserver
TaskHandle_t tCam; // handles getting picture frames from the camera and storing them locally
TaskHandle_t tStream; // actually streaming frames to all connected clients
// frameSync semaphore is used to prevent streaming buffer as it is replaced with the next frame
SemaphoreHandle_t frameSync = NULL;
// Queue stores currently connected clients to whom we are streaming
QueueHandle_t streamingClients;
// We will try to achieve 25 FPS frame rate
const int FPS = 15;
// We will handle web client requests every 50 ms (20 Hz)
const int WSINTERVAL = 100;
// ======== Server Connection Handler Task ==========================
void mjpegCB(void* pvParameters) {
TickType_t xLastWakeTime;
const TickType_t xFrequency = pdMS_TO_TICKS(WSINTERVAL);
// Creating frame synchronization semaphore and initializing it
frameSync = xSemaphoreCreateBinary();
xSemaphoreGive( frameSync );
// Creating a queue to track all connected clients
streamingClients = xQueueCreate( 10, sizeof(WiFiClient*) );
//=== setup section ==================
// Creating RTOS task for grabbing frames from the camera
xTaskCreatePinnedToCore(
camCB, // callback
"cam", // name
4096, // stacj size
NULL, // parameters
2, // priority
&tCam, // RTOS task handle
APP_CPU); // core
// Creating task to push the stream to all connected clients
xTaskCreatePinnedToCore(
streamCB,
"strmCB",
4 * 1024,
NULL, //(void*) handler,
2,
&tStream,
APP_CPU);
// Registering webserver handling routines
server.on("/mjpeg/1", HTTP_GET, handleJPGSstream);
server.on("/jpg", HTTP_GET, handleJPG);
server.onNotFound(handleNotFound);
// Starting webserver
server.begin();
//=== loop() section ===================
xLastWakeTime = xTaskGetTickCount();
for (;;) {
server.handleClient();
// After every server client handling request, we let other tasks run and then pause
taskYIELD();
vTaskDelayUntil(&xLastWakeTime, xFrequency);
}
}
// Commonly used variables:
volatile size_t camSize; // size of the current frame, byte
volatile char* camBuf; // pointer to the current frame
// ==== RTOS task to grab frames from the camera =========================
void camCB(void* pvParameters) {
TickType_t xLastWakeTime;
// A running interval associated with currently desired frame rate
const TickType_t xFrequency = pdMS_TO_TICKS(1000 / FPS);
// Mutex for the critical section of swithing the active frames around
portMUX_TYPE xSemaphore = portMUX_INITIALIZER_UNLOCKED;
// Pointers to the 2 frames, their respective sizes and index of the current frame
char* fbs[2] = { NULL, NULL };
size_t fSize[2] = { 0, 0 };
int ifb = 0;
//=== loop() section ===================
xLastWakeTime = xTaskGetTickCount();
for (;;) {
// Grab a frame from the camera and query its size
cam.run();
size_t s = cam.getSize();
// If frame size is more that we have previously allocated - request 125% of the current frame space
if (s > fSize[ifb]) {
fSize[ifb] = s * 4 / 3;
fbs[ifb] = allocateMemory(fbs[ifb], fSize[ifb]);
}
// Copy current frame into local buffer
char* b = (char*) cam.getfb();
memcpy(fbs[ifb], b, s);
// Let other tasks run and wait until the end of the current frame rate interval (if any time left)
taskYIELD();
vTaskDelayUntil(&xLastWakeTime, xFrequency);
// Only switch frames around if no frame is currently being streamed to a client
// Wait on a semaphore until client operation completes
xSemaphoreTake( frameSync, portMAX_DELAY );
// Do not allow interrupts while switching the current frame
portENTER_CRITICAL(&xSemaphore);
camBuf = fbs[ifb];
camSize = s;
ifb++;
ifb &= 1; // this should produce 1, 0, 1, 0, 1 ... sequence
portEXIT_CRITICAL(&xSemaphore);
// Let anyone waiting for a frame know that the frame is ready
xSemaphoreGive( frameSync );
// Technically only needed once: let the streaming task know that we have at least one frame
// and it could start sending frames to the clients, if any
xTaskNotifyGive( tStream );
// Immediately let other (streaming) tasks run
taskYIELD();
// If streaming task has suspended itself (no active clients to stream to)
// there is no need to grab frames from the camera. We can save some juice
// by suspedning the tasks
if ( eTaskGetState( tStream ) == eSuspended ) {
vTaskSuspend(NULL); // passing NULL means "suspend yourself"
}
}
}
// ==== Memory allocator that takes advantage of PSRAM if present =======================
char* allocateMemory(char* aPtr, size_t aSize) {
// Since current buffer is too smal, free it
if (aPtr != NULL) free(aPtr);
size_t freeHeap = ESP.getFreeHeap();
char* ptr = NULL;
// If memory requested is more than 2/3 of the currently free heap, try PSRAM immediately
if ( aSize > freeHeap * 2 / 3 ) {
if ( psramFound() && ESP.getFreePsram() > aSize ) {
ptr = (char*) ps_malloc(aSize);
}
}
else {
// Enough free heap - let's try allocating fast RAM as a buffer
ptr = (char*) malloc(aSize);
// If allocation on the heap failed, let's give PSRAM one more chance:
if ( ptr == NULL && psramFound() && ESP.getFreePsram() > aSize) {
ptr = (char*) ps_malloc(aSize);
}
}
// Finally, if the memory pointer is NULL, we were not able to allocate any memory, and that is a terminal condition.
if (ptr == NULL) {
ESP.restart();
}
return ptr;
}
// ==== STREAMING ======================================================
const char HEADER[] = "HTTP/1.1 200 OK\r\n" \
"Access-Control-Allow-Origin: *\r\n" \
"Content-Type: multipart/x-mixed-replace; boundary=123456789000000000000987654321\r\n";
const char BOUNDARY[] = "\r\n--123456789000000000000987654321\r\n";
const char CTNTTYPE[] = "Content-Type: image/jpeg\r\nContent-Length: ";
const int hdrLen = strlen(HEADER);
const int bdrLen = strlen(BOUNDARY);
const int cntLen = strlen(CTNTTYPE);
// ==== Handle connection request from clients ===============================
void handleJPGSstream(void)
{
// Can only acommodate 10 clients. The limit is a default for WiFi connections
if ( !uxQueueSpacesAvailable(streamingClients) ) return;
// Create a new WiFi Client object to keep track of this one
WiFiClient* client = new WiFiClient();
*client = server.client();
// Immediately send this client a header
client->write(HEADER, hdrLen);
client->write(BOUNDARY, bdrLen);
// Push the client to the streaming queue
xQueueSend(streamingClients, (void *) &client, 0);
// Wake up streaming tasks, if they were previously suspended:
if ( eTaskGetState( tCam ) == eSuspended ) vTaskResume( tCam );
if ( eTaskGetState( tStream ) == eSuspended ) vTaskResume( tStream );
}
// ==== Actually stream content to all connected clients ========================
void streamCB(void * pvParameters) {
char buf[16];
TickType_t xLastWakeTime;
TickType_t xFrequency;
// Wait until the first frame is captured and there is something to send
// to clients
ulTaskNotifyTake( pdTRUE, /* Clear the notification value before exiting. */
portMAX_DELAY ); /* Block indefinitely. */
xLastWakeTime = xTaskGetTickCount();
for (;;) {
// Default assumption we are running according to the FPS
xFrequency = pdMS_TO_TICKS(1000 / FPS);
// Only bother to send anything if there is someone watching
UBaseType_t activeClients = uxQueueMessagesWaiting(streamingClients);
if ( activeClients ) {
// Adjust the period to the number of connected clients
xFrequency /= activeClients;
// Since we are sending the same frame to everyone,
// pop a client from the the front of the queue
WiFiClient *client;
xQueueReceive (streamingClients, (void*) &client, 0);
// Check if this client is still connected.
if (!client->connected()) {
// delete this client reference if s/he has disconnected
// and don't put it back on the queue anymore. Bye!
delete client;
}
else {
// Ok. This is an actively connected client.
// Let's grab a semaphore to prevent frame changes while we
// are serving this frame
xSemaphoreTake( frameSync, portMAX_DELAY );
client->write(CTNTTYPE, cntLen);
sprintf(buf, "%d\r\n\r\n", camSize);
client->write(buf, strlen(buf));
client->write((char*) camBuf, (size_t)camSize);
client->write(BOUNDARY, bdrLen);
// Since this client is still connected, push it to the end
// of the queue for further processing
xQueueSend(streamingClients, (void *) &client, 0);
// The frame has been served. Release the semaphore and let other tasks run.
// If there is a frame switch ready, it will happen now in between frames
xSemaphoreGive( frameSync );
taskYIELD();
}
}
else {
// Since there are no connected clients, there is no reason to waste battery running
vTaskSuspend(NULL);
}
// Let other tasks run after serving every client
taskYIELD();
vTaskDelayUntil(&xLastWakeTime, xFrequency);
}
}
const char JHEADER[] = "HTTP/1.1 200 OK\r\n" \
"Content-disposition: inline; filename=capture.jpg\r\n" \
"Content-type: image/jpeg\r\n\r\n";
const int jhdLen = strlen(JHEADER);
// ==== Serve up one JPEG frame =============================================
void handleJPG(void)
{
WiFiClient client = server.client();
if (!client.connected()) return;
cam.run();
client.write(JHEADER, jhdLen);
client.write((char*)cam.getfb(), cam.getSize());
}
// ==== Handle invalid URL requests ============================================
void handleNotFound()
{
String message = "Server is running!\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET) ? "GET" : "POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
server.send(200, "text / plain", message);
}
// ==== SETUP method ==================================================================
void setup()
{
// Setup Serial connection:
Serial.begin(115200);
delay(1000); // wait for a second to let Serial connect
// Configure the camera
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
// Frame parameters: pick one
// config.frame_size = FRAMESIZE_UXGA;
// config.frame_size = FRAMESIZE_SVGA;
// config.frame_size = FRAMESIZE_QVGA;
config.frame_size = FRAMESIZE_VGA;
config.jpeg_quality = 12;
config.fb_count = 2;
#if defined(CAMERA_MODEL_ESP_EYE)
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
#endif
if (cam.init(config) != ESP_OK) {
Serial.println("Error initializing the camera");
delay(10000);
ESP.restart();
}
// Configure and connect to WiFi
IPAddress ip;
WiFi.mode(WIFI_STA);
WiFi.begin("w123", "gk12345678");//WIFI名称和密码
// WiFi.begin("OPPOA93", "12345678");//WIFI名称和密码
Serial.print("Connecting to WiFi");
while (WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(F("."));
}
ip = WiFi.localIP();
Serial.println(F("WiFi connected"));
Serial.println("");
Serial.print("Stream Link: http://");
Serial.print(ip);
Serial.println("/mjpeg/1");
// Start mainstreaming RTOS task
xTaskCreatePinnedToCore(
mjpegCB,
"mjpeg",
4 * 1024,
NULL,
2,
&tMjpeg,
APP_CPU);
}
void loop() {
vTaskDelay(1000);
}
烧录完成后点击窗口访问,可看到一个单独的窗口。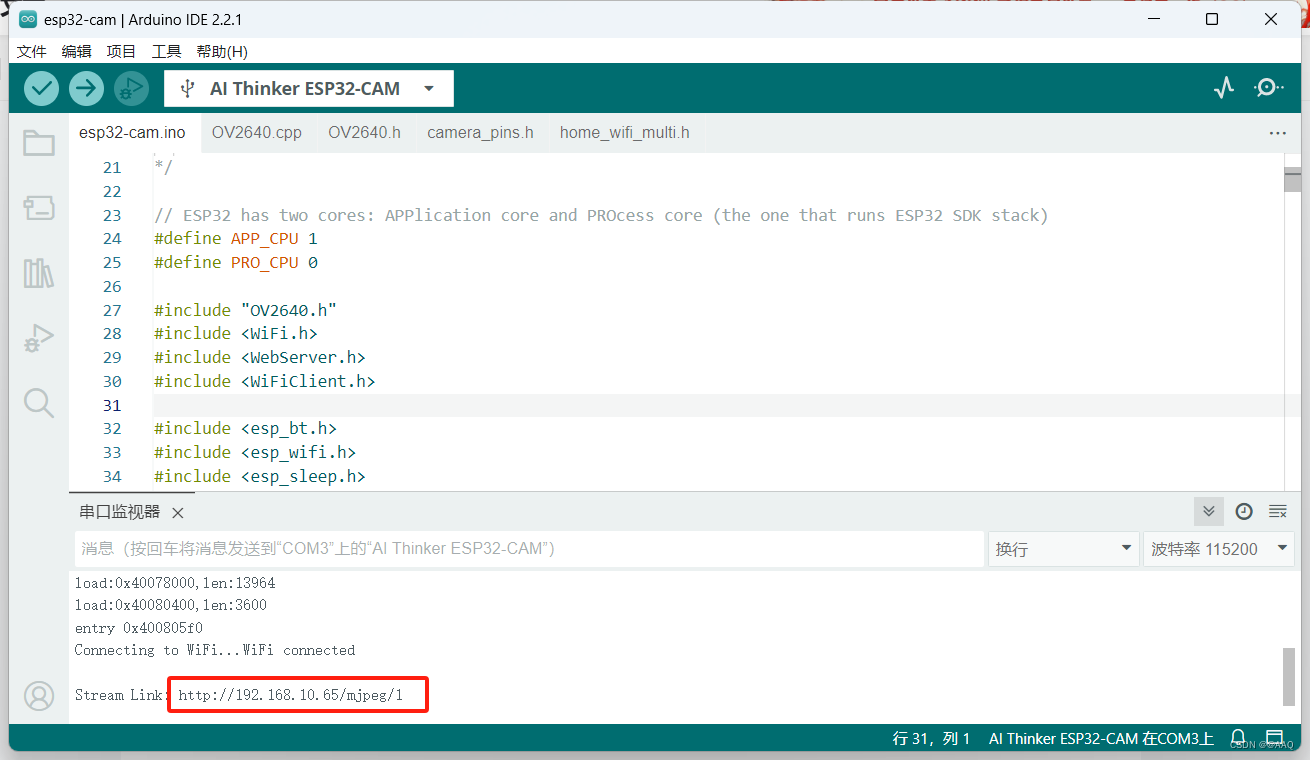
第二步:配置云服务s
使用frp技术,这里有不了解这个技术的可以去百度看一下,博主就不多介绍了。
还在在我之前使用的阿里云云服务器上的ubuntu系统中实现内网穿透,需要和自己的电脑搭配。
首先进入自己的云服务器终端
-
# 创建存放目录 sudo mkdir /frp (在当前目录创建文件夹)
-
# 创建frps.ini文件并编辑: sudo nano /frp/frps.ini
复制以下内容:[common] # 监听端口 bind_port = 7000 # 面板端口 dashboard_port = 7500 # 登录面板账号设置 dashboard_user = admin dashboard_pwd = spoto1234 # 设置http及https协议下代理端口(非重要) vhost_http_port = 7080 vhost_https_port = 7081 # 身份验证 token = 12345678输入完成后按CTRL+X后按Y回车保存退出
-
创建frp容器
sudo docker run --restart=always --network host -d -v /frp/frps.ini:/frp/frps.ini --name frps snowdreamtech/frps -
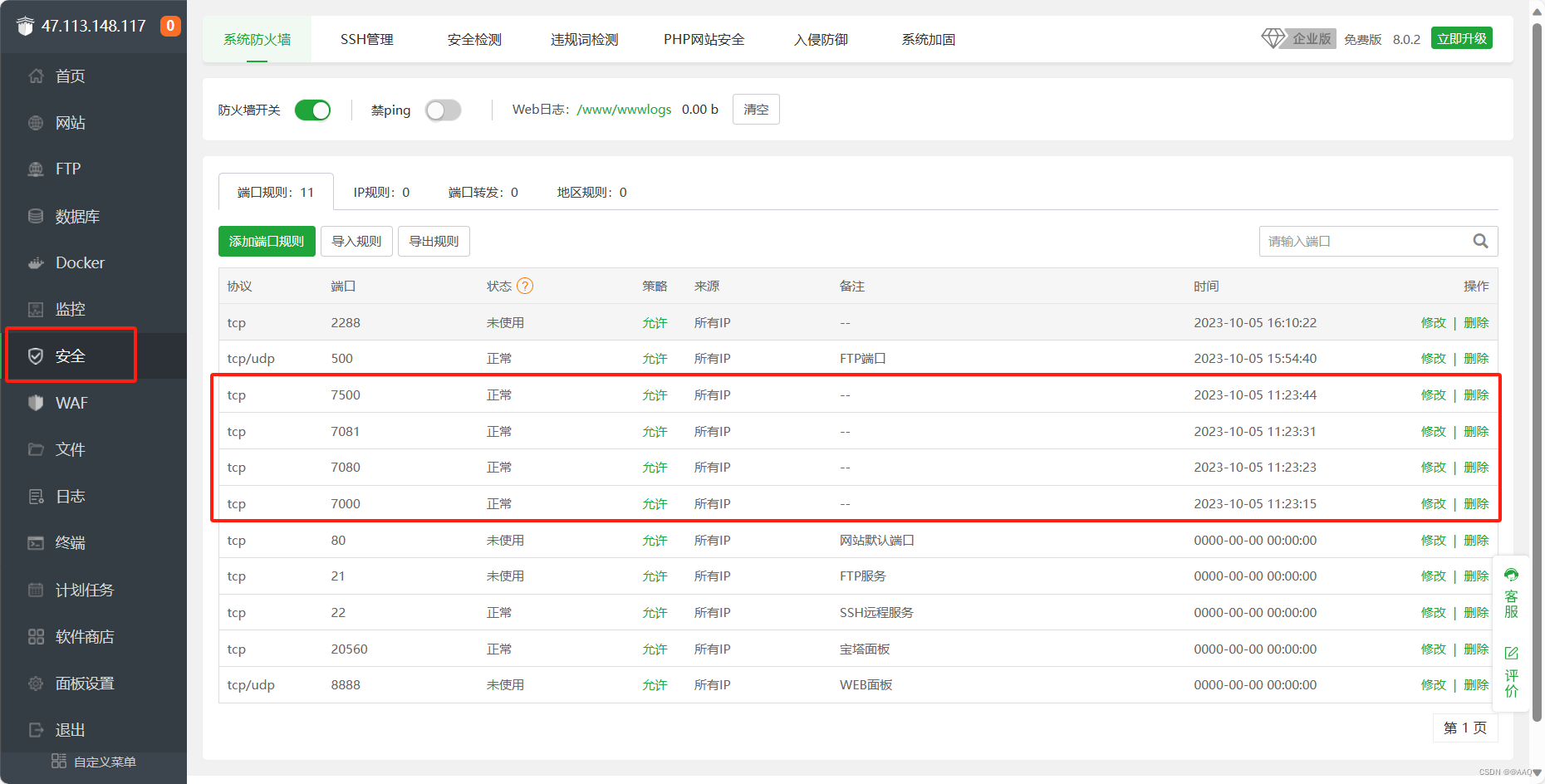
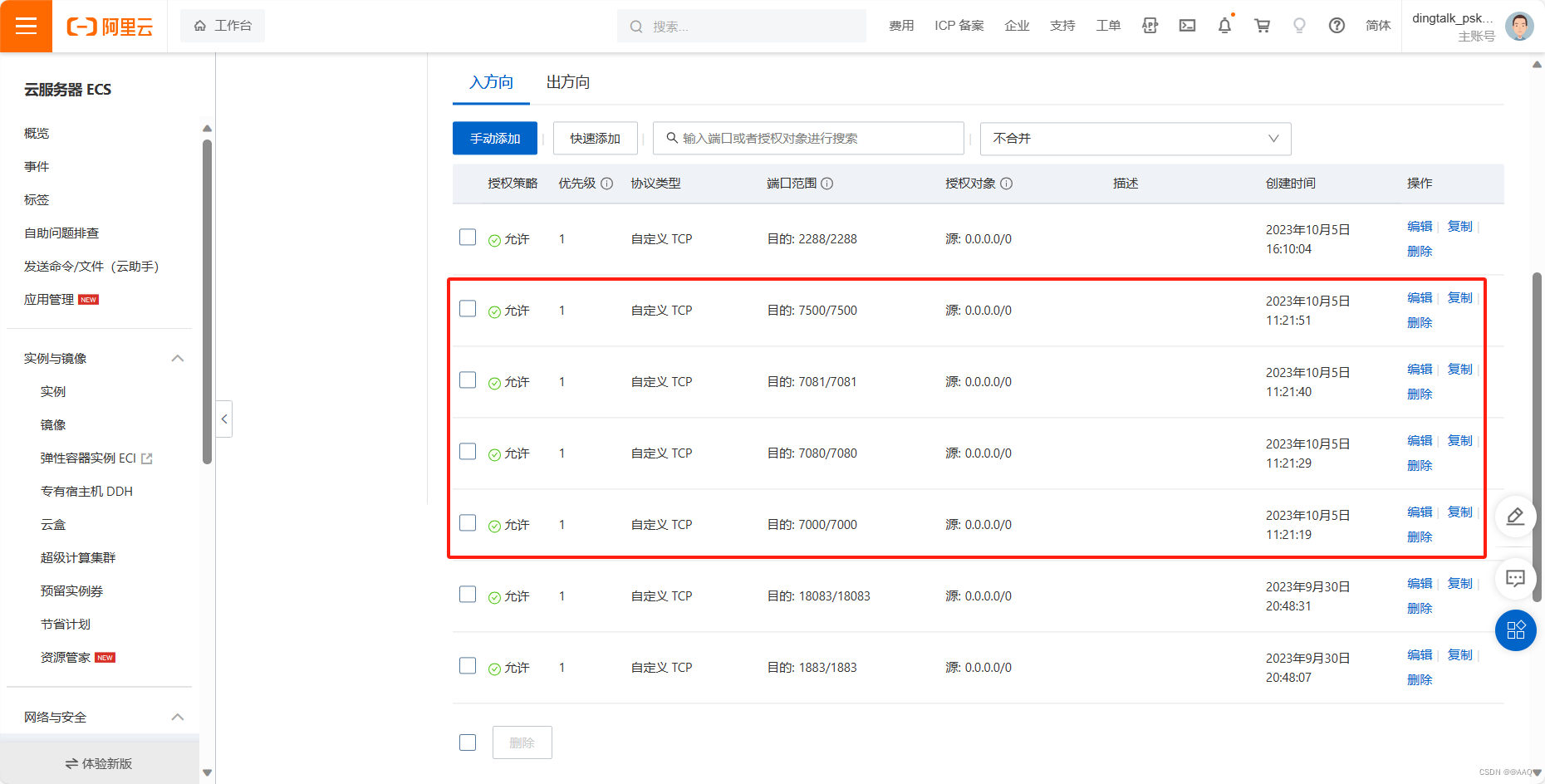
打开云服务器的7000,7080,7081,7500端口,如果安装了宝塔面板也要在宝塔面板带开这些端口
到这里如果宝塔docker显示frp正常启动就证明配置成功了,如果没有启动就点击启动一下或者看一是否是配置步骤有问题,可以重新配置一下。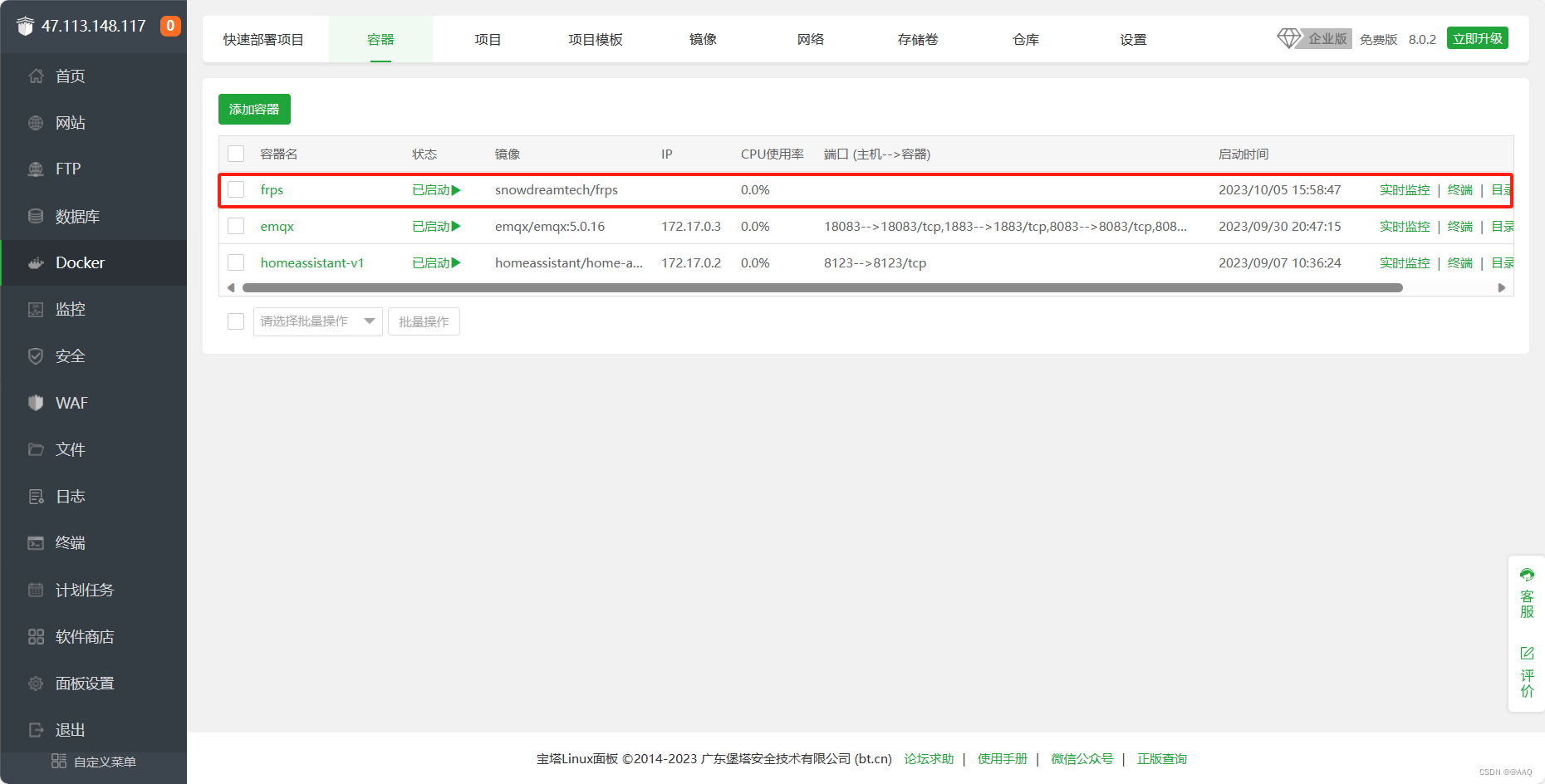
到这里服务器的frps就配置完成了,我们再配置一下window段
第三步:配置window frpc
-
打开网页Release v0.37.1 · fatedier/frp · GitHub下载frp压缩包,文明上网,网络速度慢可以点击我这里阿里云盘分享。
 阿里云盘分享。
阿里云盘分享。 -
下载后解压到目录,注意解压的目录要好找!!

-
打开frpc.ini重新编写内容
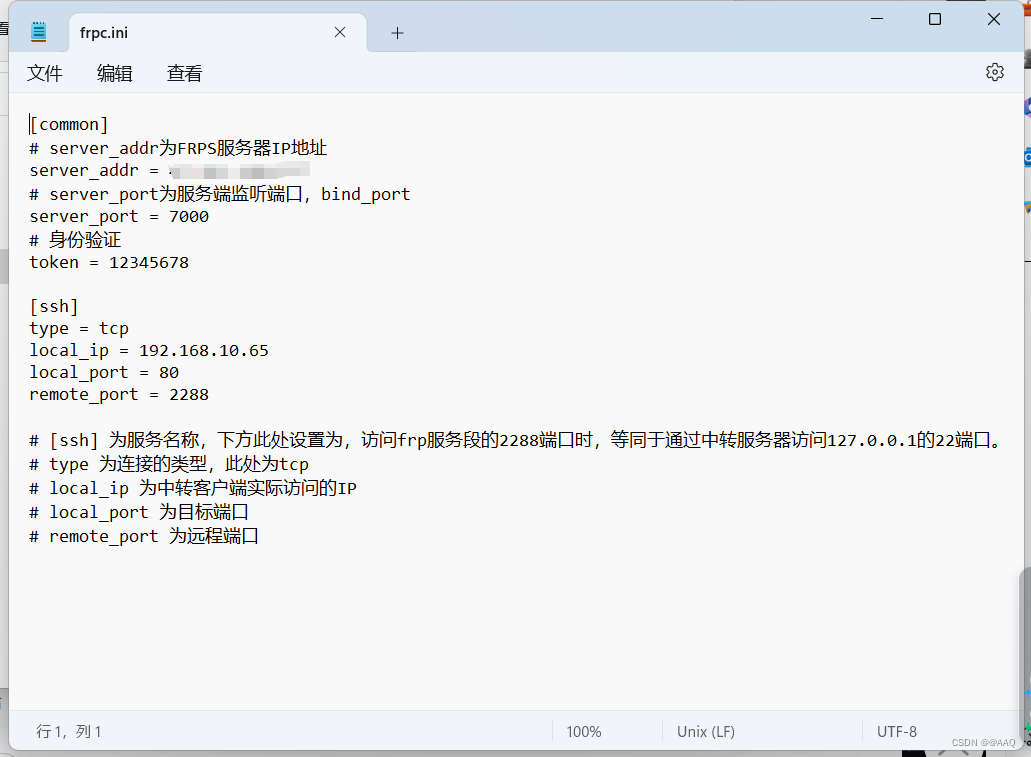
# [ssh] 为服务名称,下方此处设置为,访问frp服务段的2288端口时,等同于通过中转服务器访问127.0.0.1的22端口。
# type 为连接的类型,此处为tcp
# local_ip 为中转客户端实际访问的IP
# local_port 为目标端口
# remote_port 为远程端口
[common]
# server_addr为FRPS服务器IP地址
server_addr = xxx.xxx.xxx
# server_port为服务端监听端口,bind_port
server_port = 7000
# 身份验证
token = 12345678
[ssh]
type = tcp
local_ip = 192.168.10.65
local_port = 80
remote_port = 2288
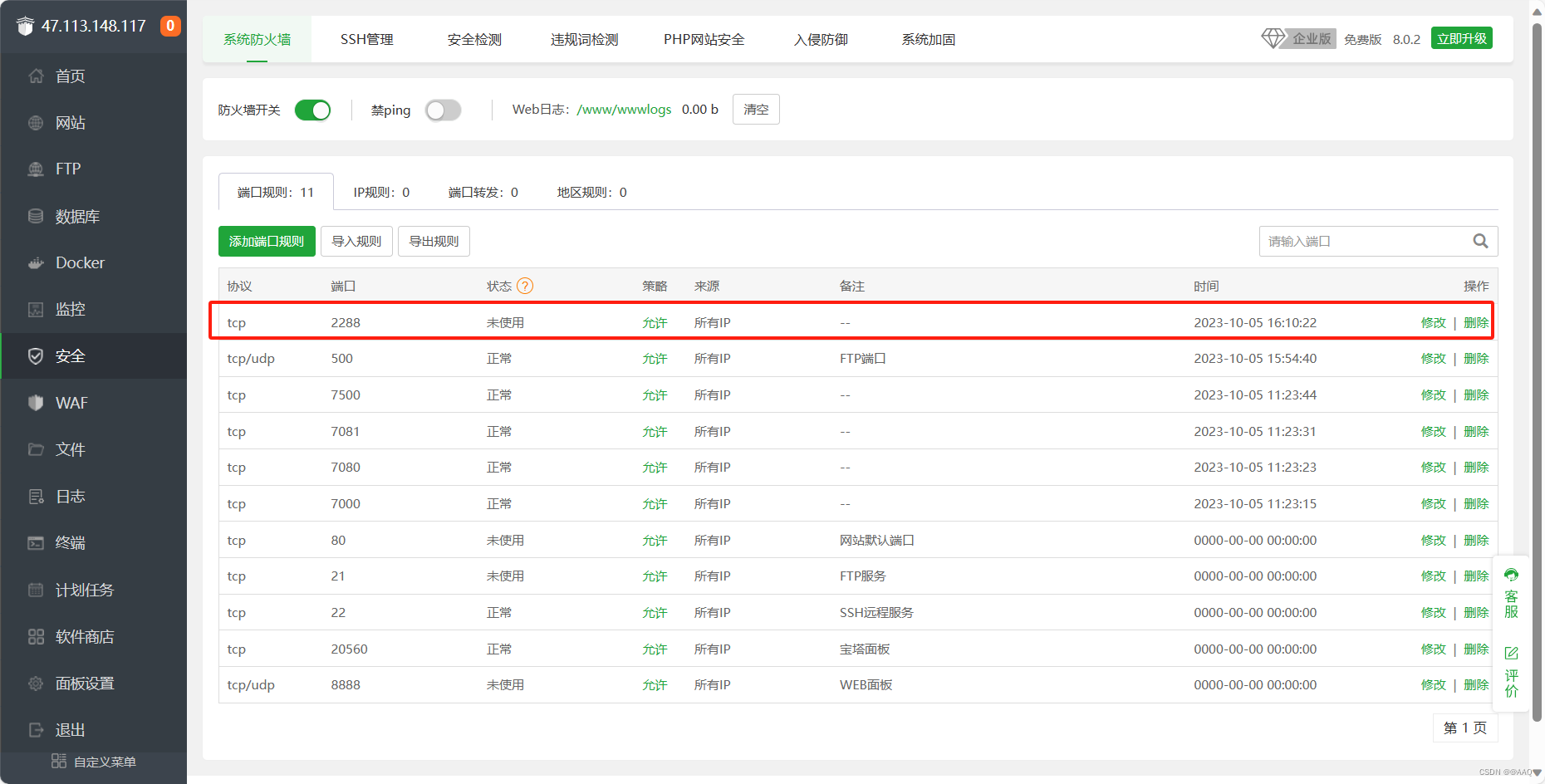
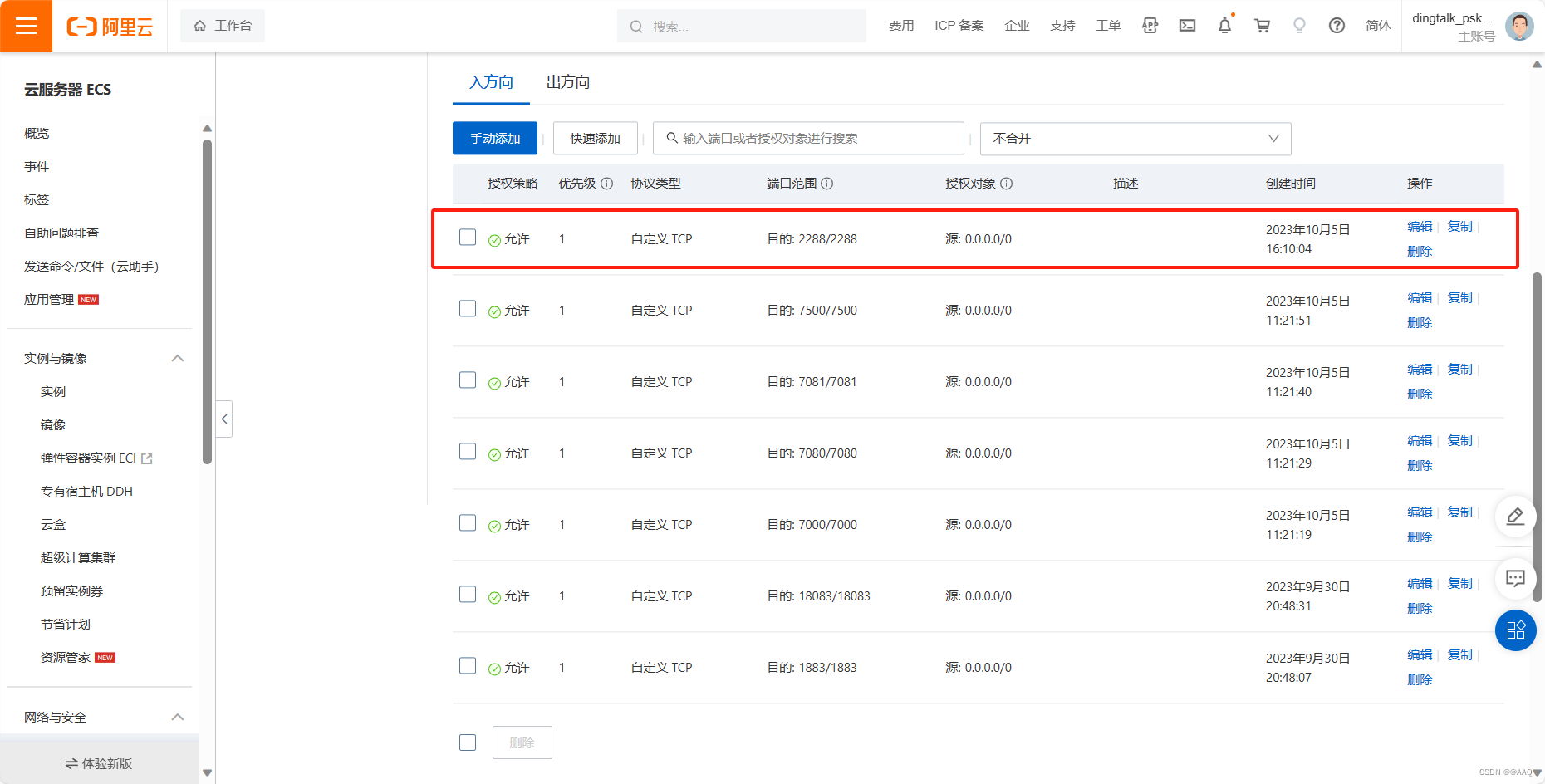
4.把阿里云和宝塔2288端口打开
5.在打开cmd,启动frpc.exe客户端如果安装目录跟我一样可以按照我的步骤,使用D:切换到D盘——>cd frp切换到frp文件夹——>frpc.exe -c frpc.ini运行程序。也可以直接在安装frp目录下打开cmd运行frpc.exe -c frpc.ini。
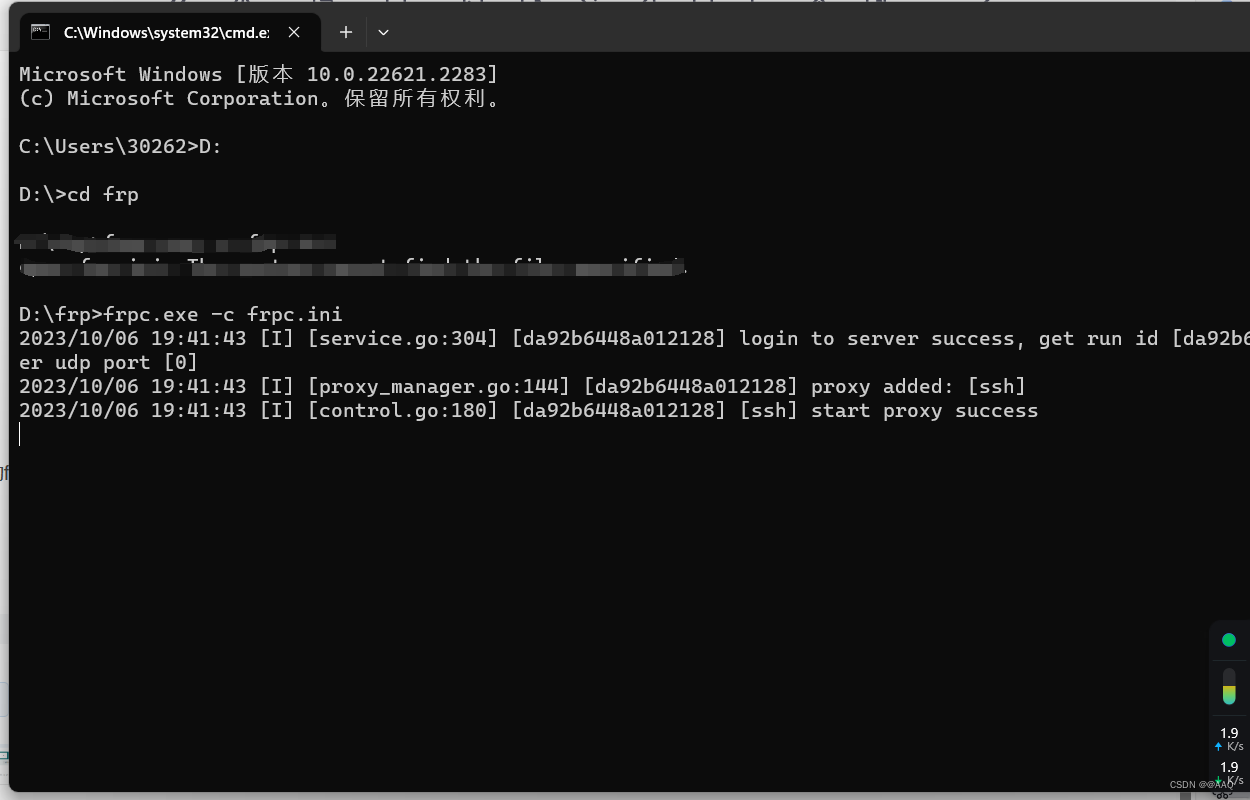
6.这时候就可以直接用 [服务器]:2288端口远程访问你的ESP32-CAM啦。
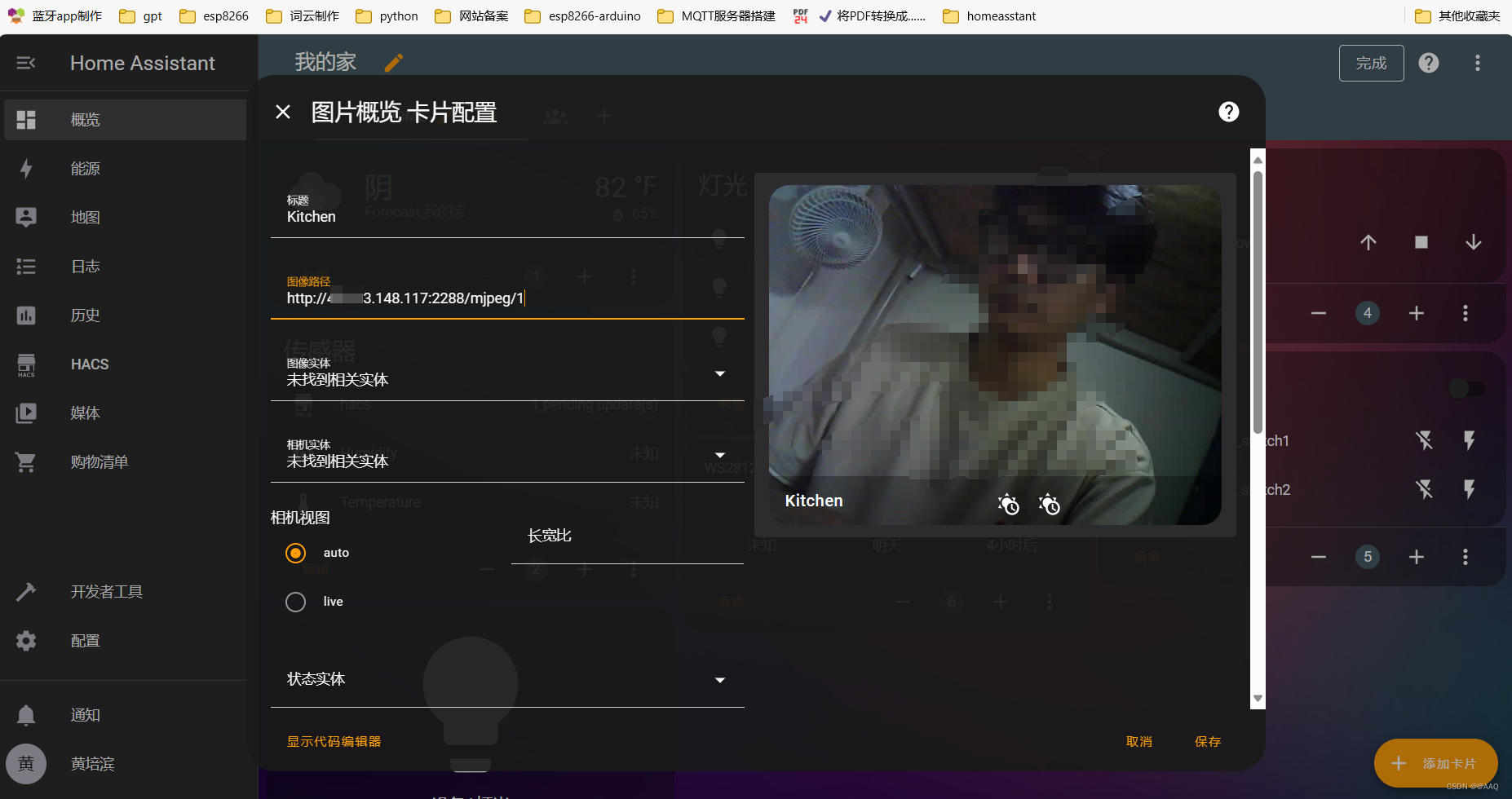
最后就可以加入homeasstant啦
参考:ubantu云服务器与win10下的frp内网穿透部署,并远程控制esp32_启明师兄不会呀!的博客-CSDN博客















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









