






目录
指标2:SNR(信噪比)与PSNR(峰值信噪比)(越高越好)
指标4:LPIPS (Learned Perceptual Image Patch Similarity)学习型感知图像块相似性(越低越好)
指标5:MSE(均方误差, Mean Squared Error)(越低越好)
指标6:RMSE(均方根误差, Root Mean Squared Error)(越低越好)
指标7:MAE(平均绝对误差, Mean Absolute Error)(越低越好)
指标1:SILog 尺度不变对数误差(越低越好)
SILog(Scale-Invariant Logarithmic Error):在计算机视觉中,SIlog是一种用于评估深度估计模型性能的误差度量指标。它通过对深度值取对数,消除不同尺度间的影响,重点衡量深度估计的相对误差。SIlog的值越小,表示模型的深度估计更稳定且与实际更接近。
Eigen 等人在使用多尺度深度网络 (arXiv) 从单个图像进行深度图预测中提出了此功能,它被广泛用于训练和评估深度预测模型(通常与其他与尺度相关的术语结合使用)。此函数的缺点是预测输出的规模不会影响其量级。以下是论文原文:
指标来源的论文:1406.2283![]() https://arxiv.org/pdf/1406.2283 根据论文关于SILog的描述:
https://arxiv.org/pdf/1406.2283 根据论文关于SILog的描述:
尺度不变误差(Scale-Invariant Error)在深度预测中的作用和计算方式。其核心思想是:由于三维场景的全局尺度(global scale)在深度预测中存在固有的不确定性,仅靠传统的逐像素误差(如 RMSE)无法准确衡量预测质量,因此提出了一种尺度不变误差来关注深度关系,而不依赖于绝对尺度。
1、全局尺度的不确定性对深度预测的影响
深度预测存在“尺度歧义”(Scale Ambiguity),即无法确定整个场景的绝对尺度。
传统的误差度量(如 RMSE)受到尺度误差的影响较大。例如:
- 训练 Make3D 模型在 NYU Depth 数据集上的 RMSE 误差为 0.41(对数空间下)。
- 但如果用真实均值替换预测均值,则误差降到 0.33(减少 20%)。
- 这说明,仅仅找到正确的全局尺度就能显著降低误差。
2、尺度不变误差的定义
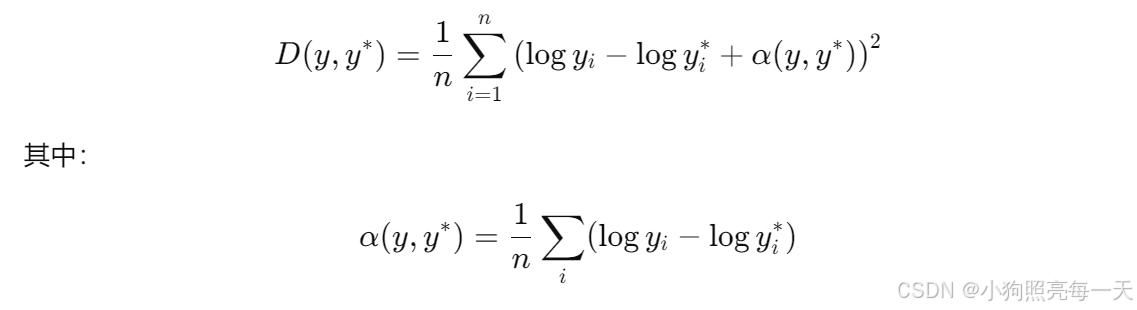
这个 α是用于最小化误差的最佳尺度因子,它确保预测和真实值的整体尺度对齐,使得误差不依赖于全局尺度变化。
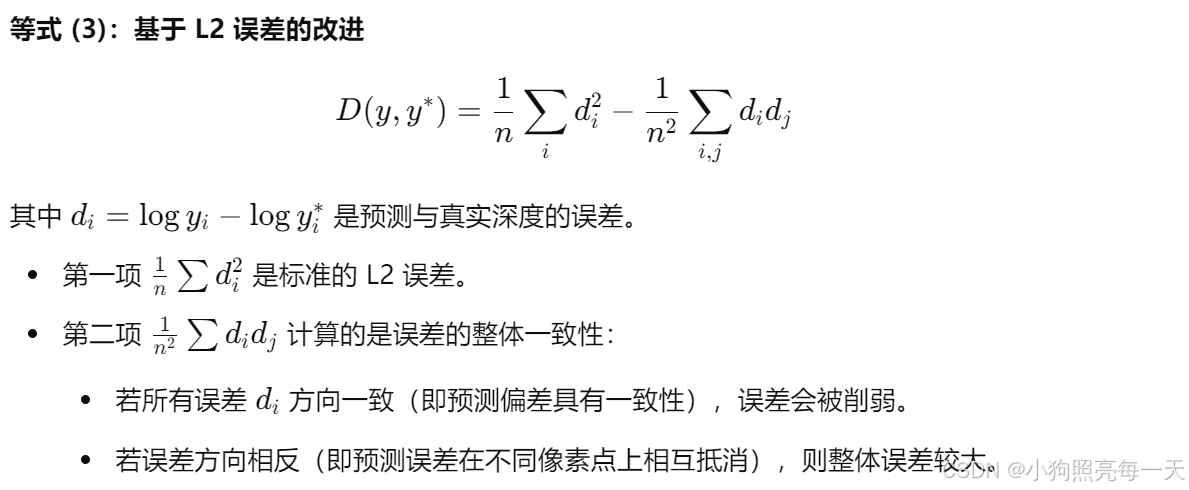
3、尺度不变误差的等价形式

- 这里强调:尺度不变误差关注的是像素对之间的深度差值,而不是每个像素的绝对深度。
- 换句话说,若预测中的两个像素点的深度关系与真实深度的关系相同(即深度差值匹配),则误差较小。
通过这一误差度量方式,可以在不考虑全局尺度的情况下评估深度预测的质量。它更关注预测的相对深度关系,即物体的远近关系是否正确,而非绝对深度值是否精确。这种方法对尺度歧义问题具有鲁棒性,并能更准确地衡量深度预测性能。以下是定义的函数和使用:
import torch
import torch.nn.functional as F
def silog_loss(pred, target, valid_mask=None, weight=1.0):
"""
计算 Scale-Invariant Logarithmic (SIlog) Loss。
参数:
- pred: 预测深度图 (Tensor),形状 [B, H, W] 或 [B, 1, H, W]
- target: 真实深度图 (Tensor),形状 [B, H, W] 或 [B, 1, H, W]
- valid_mask: (可选) 有效像素掩码,形状 [B, H, W],用于忽略无效深度值
- weight: 损失权重系数
返回:
- 计算得到的 SIlog Loss(标量 Tensor)
"""
if valid_mask is not None:
pred = pred[valid_mask]
target = target[valid_mask]
# 计算 log 深度误差
log_diff = torch.log(pred + 1e-6) - torch.log(target + 1e-6)
# 计算第一项:log 误差平方和
silog1 = torch.mean(log_diff ** 2)
# 计算第二项:均值校正项
silog2 = (torch.mean(log_diff) ** 2)
# 计算 SIlog Loss
loss = silog1 - weight * silog2
return loss
使用示例:
# 创建模拟深度图
pred_depth = torch.rand(1, 1, 256, 256) * 10 # 预测的深度图
gt_depth = torch.rand(1, 1, 256, 256) * 10 # 真实深度图
# 计算 SIlog Loss
loss_value = silog_loss(pred_depth, gt_depth)
print(f"SIlog Loss: {loss_value.item()}")
指标2:SNR(信噪比)与PSNR(峰值信噪比)(越高越好)
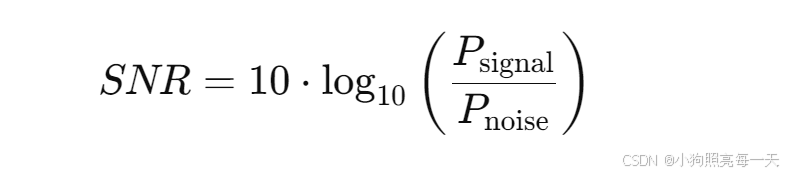
1、SNR 信噪比
-
定义:SNR 衡量信号的能量相对于噪声的能量的比值,通常用于衡量信号的整体质量。
-
计算公式:
其中:
-

-
特点:
- 计算的是整个信号与噪声的比值,没有考虑峰值的概念。
- 常用于通信、音频、医学信号等领域,衡量信号受到噪声干扰的程度。
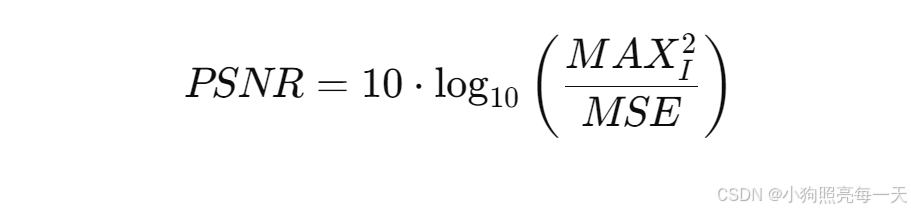
2、PSNR 峰值信噪比
-
定义:PSNR 主要用于图像和视频质量评估,衡量失真图像相对于原始图像的质量。
-
计算公式:
-
其中:
-
-
特点:
- 主要用于衡量图像和视频的重建质量,数值越大表示质量越高。
- 由于是基于最大像素值计算的,所以比 SNR 更适用于图像质量评估。
- 对人眼视觉系统的感知不够敏感,因此通常会搭配 SSIM 或 LPIPS 一起使用。
import cv2
# 读取两张图片(确保两张图片大小相同)
img1 = cv2.imread("image1.png")
img2 = cv2.imread("image2.png")
# 计算 PSNR
psnr_value = cv2.PSNR(img1, img2)
print(f"PSNR: {psnr_value} dB")
指标3:SSIM 结构相似性(越高越好)
0-1之间,结构相似性指标(Structural Similarity, SSIM)是一种更为复杂的图像质量评价指标。SSIM认为图像质量不仅取决于像素点间的差异,还与图像结构信息的相似程度有关。SSIM考虑了亮度、对比度和结构三个方面的相似性,是对MSE和PSNR的一个重要补充。
SSIM 适用于:
- 图像质量评估(如压缩、重建、增强等)。
- 计算机视觉和深度学习任务(如图像生成、去噪、超分辨率等)。
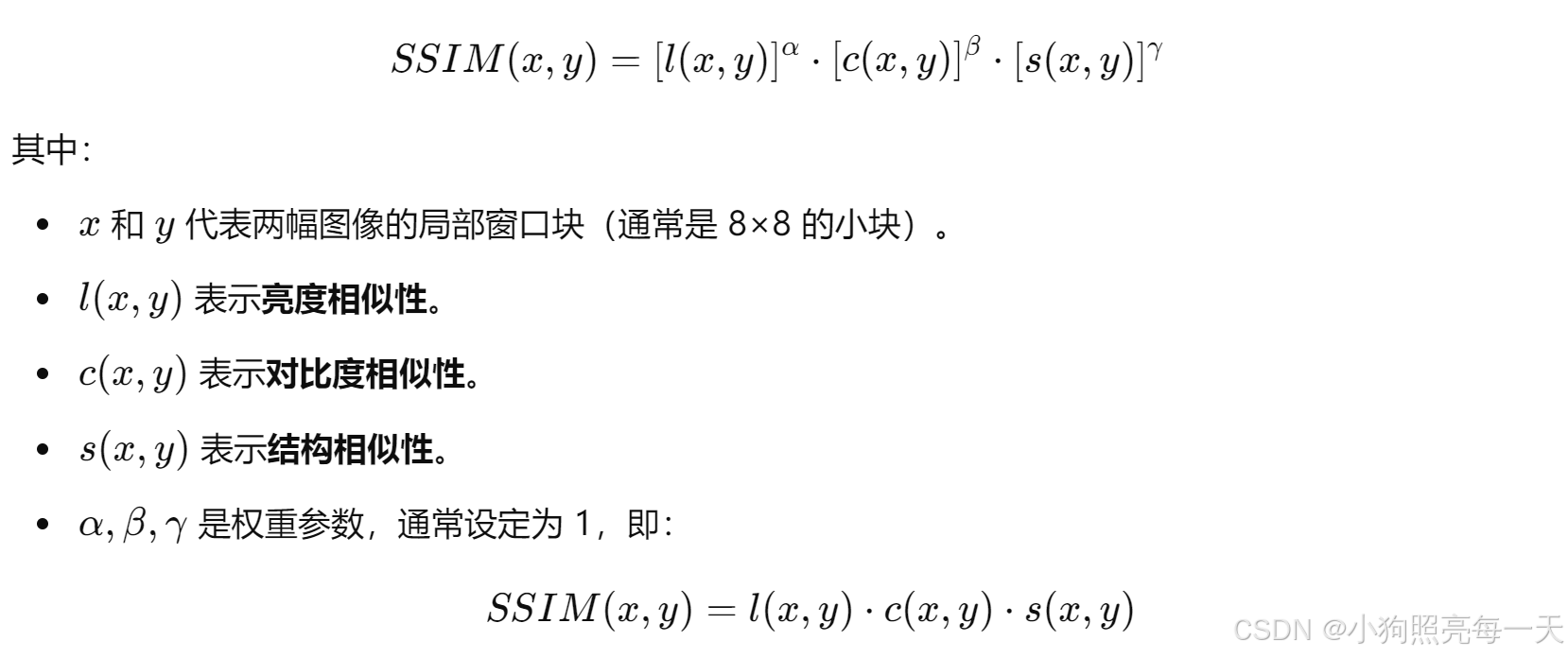
1、亮度对比
2、对比度对比

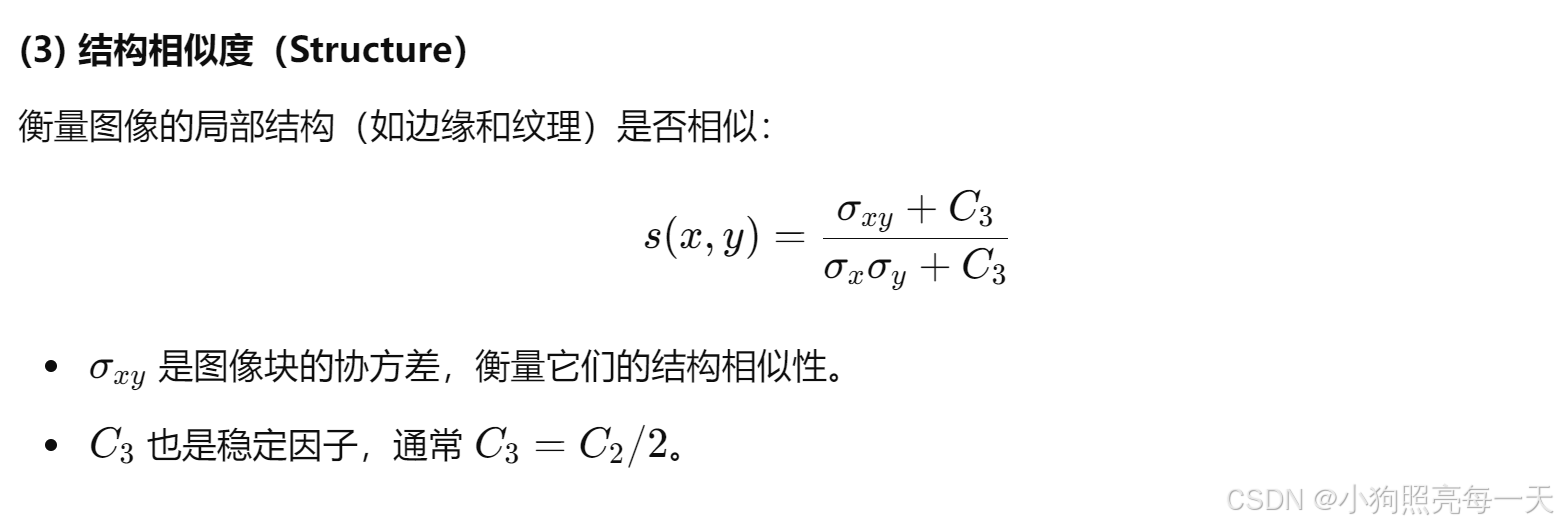
3、结构相似度
from skimage.metrics import structural_similarity as ssim
import cv2
# 读取两张灰度图像
img1 = cv2.imread("image1.png", cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread("image2.png", cv2.IMREAD_GRAYSCALE)
# 计算 SSIM
ssim_value, _ = ssim(img1, img2, full=True)
print(f"SSIM: {ssim_value}")
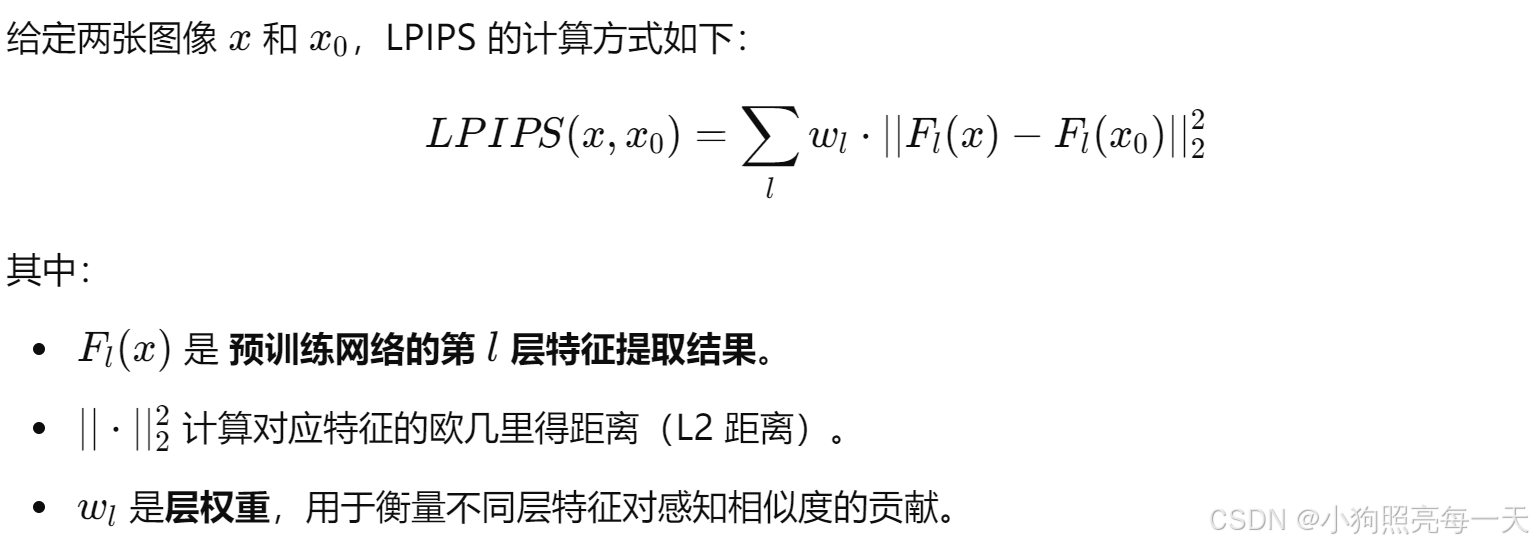
指标4:LPIPS (Learned Perceptual Image Patch Similarity)学习型感知图像块相似性(越低越好)
是一种 基于深度学习的感知相似度度量,用于衡量两幅图像之间的感知差异。它弥补了 PSNR、SSIM 等传统指标 不能准确反映人眼感知质量的问题,广泛用于图像生成、超分辨率、去噪等任务的质量评估。
LPIPS 利用预训练深度卷积神经网络(如 VGG、AlexNet、SqueezeNet) 提取图像的特征,并计算它们在高维感知空间中的距离。
LPIPS的设计灵感来自于人眼对图像的感知,它通过学习一个神经网络模型来近似人类感知的视觉相似性。该模型使用卷积神经网络(CNN)对图像的局部补丁进行特征提取,并计算补丁之间的相似性得分。
具体而言,LPIPS的计算过程如下:
-
使用预训练的CNN模型(通常是基于深度学习的图像分类模型)提取原始图像和重建图像的特征表示。
-
将提取的特征表示作为输入,通过一个距离度量函数计算图像之间的相似性得分。
-
相似性得分表示图像之间在感知上的差异,数值越小表示图像之间的感知差异越小,图像质量越好。
LPIPS的得分范围通常是0到1之间,数值越小表示图像的感知质量越高。
与传统的图像质量评估指标(如PSNR和SSIM)相比,LPIPS更加注重于人眼感知的因素,能够更好地捕捉到图像之间的感知差异。它在图像生成、图像编辑等任务中被广泛应用,特别适用于需要考虑感知质量的场景。
需要注意的是,LPIPS是一种基于学习的指标,它的性能受到所使用的CNN模型和训练数据的影响。因此,在使用LPIPS进行图像质量评估时,需要使用与训练模型相似的数据集和预训练模型,以保证评估结果的准确性和可靠性。
import lpips
import torch
import torchvision.transforms as transforms
from PIL import Image
# 加载 LPIPS 计算器(默认使用 VGG)
lpips_loss = lpips.LPIPS(net='vgg')
# 读取两张图像并转换为张量
transform = transforms.Compose([transforms.Resize((256, 256)), transforms.ToTensor()])
img1 = transform(Image.open("image1.png")).unsqueeze(0) # 添加 batch 维度
img2 = transform(Image.open("image2.png")).unsqueeze(0)
# 计算 LPIPS 距离
distance = lpips_loss(img1, img2)
print(f"LPIPS 距离: {distance.item()}")
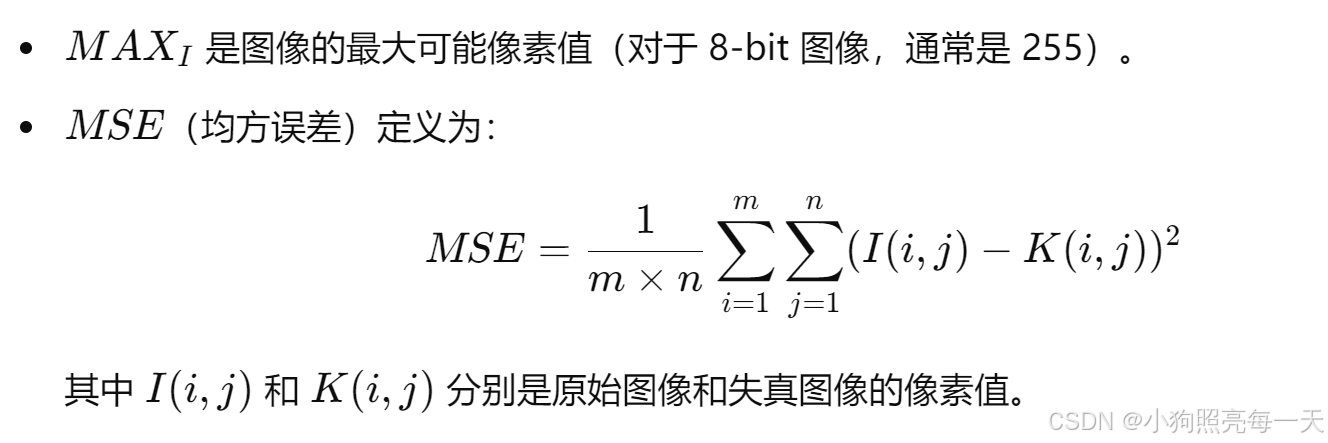
指标5:MSE(均方误差, Mean Squared Error)(越低越好)
MSE 衡量的是预测值与真实值之间的均方误差,其公式为:
1、特点
✅ 对大误差敏感,因为误差平方放大会放大极端值的影响。
✅ 适用于连续变量(如图像重建、深度预测)。
❌ 误差是平方单位,难以直接解释。
❌ 对离群点敏感,可能导致模型过拟合。
2、适用场景
- 适用于 无噪声或噪声较小的任务,比如 3D 形状重建、图像去噪、超分辨率等。
- 在 误差平方更符合应用需求时(如需要对大误差进行更严重的惩罚)。
import numpy as np
def compute_mse(y_true, y_pred):
return np.mean((y_true - y_pred) ** 2)
# 示例数据
y_true = np.array([3, -0.5, 2, 7])
y_pred = np.array([2.5, 0.0, 2, 8])
mse_value = compute_mse(y_true, y_pred)
print(f"MSE: {mse_value}")
指标6:RMSE(均方根误差, Root Mean Squared Error)(越低越好)

1、特点
✅ 单位与原始数据相同,直观易理解。
✅ 仍然对大误差敏感,但比 MSE 更直观。
❌ 仍然受极端值影响(因为是 MSE 的平方根)。
2、适用场景
- 需要误差单位直观可解释(与原像素或深度值一致)。
- 误差平方根更符合应用需求,如 3D 形状评估、点云误差计算。
def compute_rmse(y_true, y_pred):
return np.sqrt(np.mean((y_true - y_pred) ** 2))
rmse_value = compute_rmse(y_true, y_pred)
print(f"RMSE: {rmse_value}")
指标7:MAE(平均绝对误差, Mean Absolute Error)(越低越好)

1、特点
✅ 对离群点不敏感,比 MSE/RMSE 更鲁棒。
✅ 误差的单位与像素或数值一致,易于解释。
❌ 对大误差没有额外的惩罚,可能导致某些误差较大的点未被充分优化。
2、适用场景
- 适用于数据中可能存在噪声或离群点的任务(如深度预测、3D 重建误差评估)。
- 当误差的实际大小更重要时,而不是对大误差施加额外权重(如医疗影像分析)。
def compute_mae(y_true, y_pred):
return np.mean(np.abs(y_true - y_pred))
mae_value = compute_mae(y_true, y_pred)
print(f"MAE: {mae_value}")
——20250221
小狗照亮每一天


















 11万+
11万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









