







上一篇我们解析了所有Pipeline的基类
DiffusionPipeline。后续各种各样的pipeline都继承了DiffusionPipeline的模型加载保存等功能,然后再配合各个组件实现各种的结构即可。
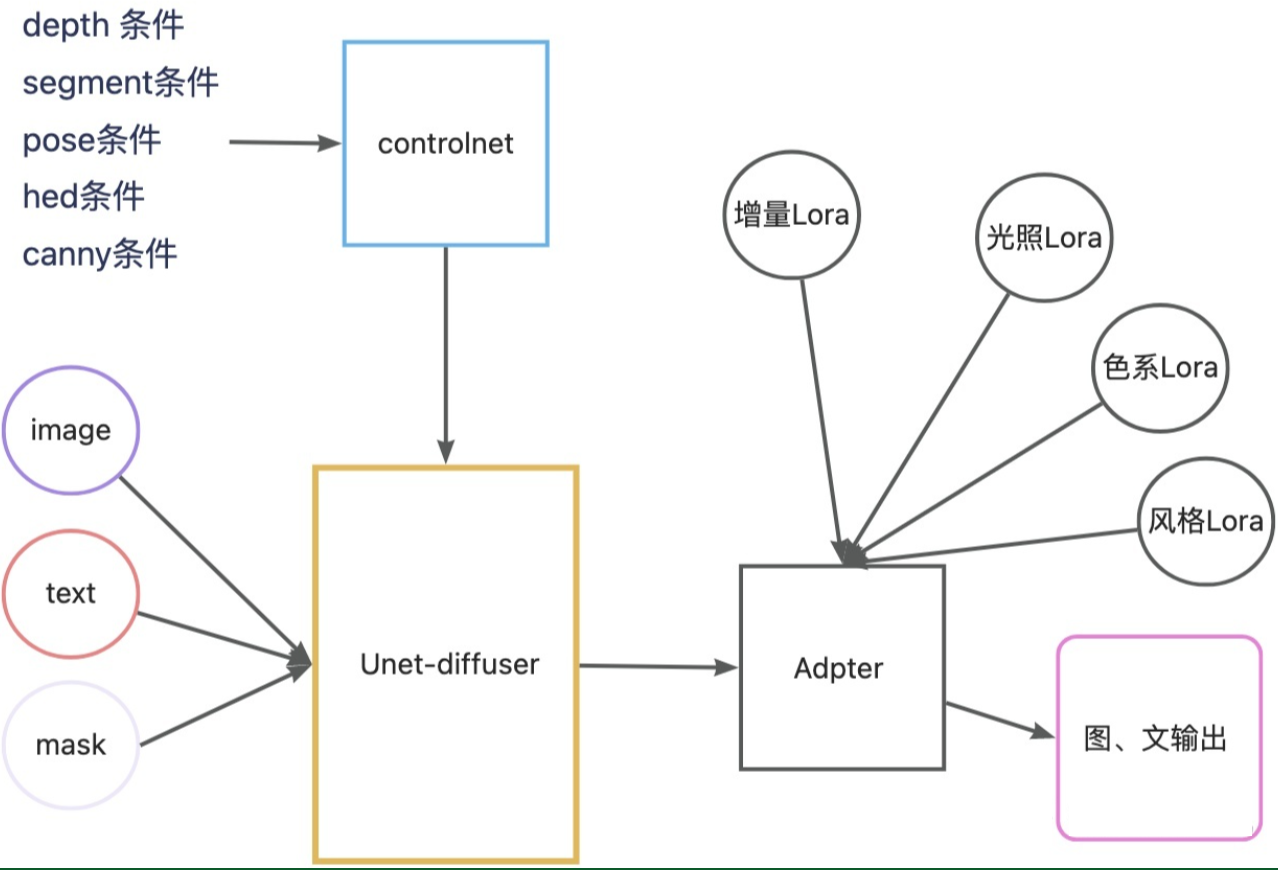
事实上,一个Pipeline通常包含了如下模块(from_pretrained函数根据model_index.json文件new了一个Pipeline,挨个扫描子文件夹创建模块加载对应的weight和config):
- VAE,即变分自编码器,把图像编码到特征,进行生成过程后再把特征解码到图像。
(有weight) - UNet,用于迭代采样预测噪声的模型。
(有weight) - Text Encoder,用于把tokens编码为一串向量,用来控制扩散模型的生成。(
有weight) - Tokenizer,把输入的文本按照字典编码为上面的tokens。
- Scheduler,我们知道扩散模型有很多采样方法,Scheduler定义了我们用哪种采样方法
- Safety_checker,NSFW检测器,很多人应该都不想要这个,可以去掉。
- Feature_extractor,也是NSFW检测器的一部分,也可以去掉。
- Image Encoder,如果有image作为条件就会需要,计算image embedding,用来控制扩散模型的生成
(有weight) - Image Processor,配合Image Encoder,在计算emebedding之前进行一些数据增强。
- ControlNet,如果使用各种control condition就会需要,本质是半个UNet,用于计算condition_images的feature 融合到UNet中
(有weight)
本节我将带领大家解构diffusers中3个我觉得最有学习意义的Pipeline:
- SD-Inpainting:
StableDiffusionInpaintPipeline - ControlNet:
StableDiffusionControlNetPipeline - AnimateDiff:
AnimateDiffPipeline
理解了上方这几个Pipeline,我们后续就很好对任意的pipeline进行修改和自定义了,无论是需要图像生成结构控制,还是局部重绘,亦或是需要视频生成一致性控制,都可以有一个很好的理解。
对于每个pipeline,我将按照如下方式展开:
- 首先,进行组件的介绍
__init__。 - 然后,按照pipeline的执行顺序
__call__,分模块的讲解实现代码和原理。
【注意:SD作为经典的Pipeline我放在前面讲解,后面的Pipeline的某些代码,如果和SD相同,我将不再重复讲解,如果有细微差别,我会专门讲解】
题外话:我们看那典中典的五行代码,最后一行pipeline(xxx),代表着我们用这个对象的名称作为一个函数的调用,那么这种用法就会自动调用StableDiffusionPipeline类中的__call__()函数。事实上,Diffusers库中的大多数类我们首先就要看__init__()函数和__call__()函数。
StableDiffusionInpaintPipeline
Inpaint是一项图片局部重绘技术,可以从图片上去除不必要的物体,让您轻松摆脱照片上的水印、划痕、污渍、标志等瑕疵。
一般来讲,图片的inpaint过程可以理解为两步:
1、找到图片中的需要重绘的部分,比如上述提到的水印、划痕、污渍、标志等。
2、自动填充图片重绘区域应该有的内容,如去掉水印、划痕、污渍、标志等。
组件:
vae: Union[AutoencoderKL, AsymmetricAutoencoderKL],
text_encoder: CLIPTextModel,
tokenizer: CLIPTokenizer,
unet: UNet2DConditionModel,
scheduler: KarrasDiffusionSchedulers,
safety_checker: StableDiffusionSafetyChecker,
feature_extractor: CLIPImageProcessor,
image_encoder: CLIPVisionModelWithProjection = None,
加载模型
根据上节可知,StableDiffusionInpaintPipeline调用from_pretrained依次加载各个模块,再最后执行__init__()函数:这一段把所有模块组合起来,并为pipeline注册对应的配置信息(一个FrozenDict类self._internal_dict中)。
def __init__(
self,
vae: Union[AutoencoderKL, AsymmetricAutoencoderKL],
text_encoder: CLIPTextModel,
tokenizer: CLIPTokenizer,
unet: UNet2DConditionModel,
scheduler: KarrasDiffusionSchedulers,
safety_checker: StableDiffusionSafetyChecker,
feature_extractor: CLIPImageProcessor,
image_encoder: CLIPVisionModelWithProjection = None,
requires_safety_checker: bool = True,
):
super().__init__()
# 中间是对safety_checker的警告,可以直接无视,
self.register_modules(
vae=vae,
text_encoder=text_encoder,
tokenizer=tokenizer,
unet=unet,
scheduler=scheduler,
safety_checker=safety_checker,
feature_extractor=feature_extractor,
image_encoder=image_encoder,
)
# vae的缩放系数,以及vae的图像预处理操作
self.vae_scale_factor = 2 ** (len(self.vae.config.block_out_channels) - 1)
self.image_processor = VaeImageProcessor(vae_scale_factor=self.vae_scale_factor)
self.mask_processor = VaeImageProcessor(
vae_scale_factor=self.vae_scale_factor, do_normalize=False, do_binarize=True, do_convert_grayscale=True
)
self.register_to_config(requires_safety_checker=requires_safety_checker)
这里的所有模块已经new好并已经读取了对应的模型文件(由DiffusionPipeline.from_pretrained实现)
register_to_config完成模型参数的配置(维护一个字典_internal_dict),我们可以打印pipeline._internal_dict查看配置信息:
FrozenDict([('vae', ('diffusers', 'AutoencoderKL')),
('text_encoder', ('transformers', 'CLIPTextModel')),
('tokenizer', ('transformers', 'CLIPTokenizer')),
('unet', ('diffusers', 'UNet2DConditionModel')),
('scheduler', ('diffusers', 'PNDMScheduler')),
('safety_checker',
('stable_diffusion', 'StableDiffusionSafetyChecker')),
('feature_extractor', ('transformers', 'CLIPImageProcessor')),
('requires_safety_checker', True)])
其中对于difusers库的组件(vae、unet、scheduler),我们也可以查看它们的_internal_dict,内部保存了模型的结构和配置参数,如vae._internal_dict:
FrozenDict([('in_channels', 3),
('out_channels', 3),
('down_block_types',
['DownEncoderBlock2D',
'DownEncoderBlock2D',
'DownEncoderBlock2D',
'DownEncoderBlock2D']),
('up_block_types',
['UpDecoderBlock2D',
'UpDecoderBlock2D',
'UpDecoderBlock2D',
'UpDecoderBlock2D']),
('block_out_channels', [128, 256, 512, 512]),
('layers_per_block', 2),
('act_fn', 'silu'),
('latent_channels', 4),
('norm_num_groups', 32),
('sample_size', 512),
('_class_name', 'AutoencoderKL'),
('_diffusers_version', '0.6.0'),
('_name_or_path',
'/data1/huggingface/StableDiffusion/stable-diffusion-v1-5/vae')])
此Pipe继承自 DiffusionPipeline。除此之外Pipe还继承了以下加载方法:
load_textual_inversion()用于加载文本反转嵌入load_lora_weights()用于加载 LoRA 权重save_lora_weights()用于节省 LoRA 权重- l
oad_ip_adapter()用于加载 IP 适配器 - f
rom_single_file()用于加载文件.ckpt
Pipe推理流程
如何做到这一点呢?我们需要结合img2img方法,我们首先考虑inpaint的两个输入:一个是原图,另外一个是mask图。
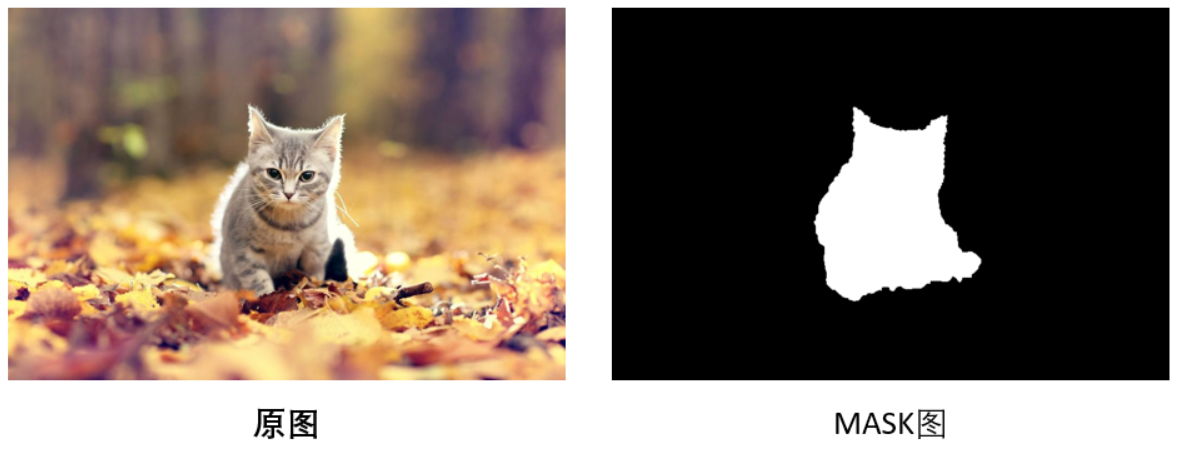
Stable Diffusion中的inpaint的实现方式有两种,由num_channels_unet = self.unet.config.in_channels参数决定:
- 重新训练
in_channel=9的UNet:只需要更改unet的输入channel=9=(4+4+1),重新训练,直接将(4通道的noise_latent、 4通道的masked_image_latent、1通道的mask_latent)三者进行concat送入unet即可。 - 利用任意预训练好的
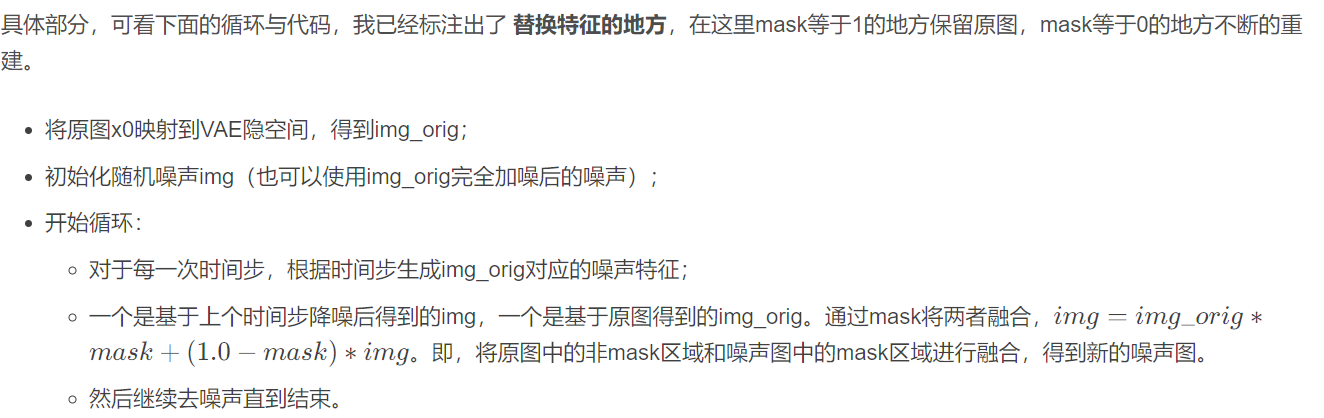
in_channel=4的UNet:让Stable Diffusion只生成指定区域,并且在生成指定区域的时候参考其它区域。在图像重建的20步中,对于每个timestep送入unet的latent特征 n e w L a t e n t = m a s k ∗ i m a g e L a t e n t + ( 1 − m a s k ) ∗ o l d L a t e n t new Latent = mask*imageLatent + (1-mask)*oldLatent newLatent=mask∗imageLatent+(1−mask)∗oldLatent,我们利用mask将不重建的地方都替换成 原图按照当前步数加噪后的latent特征(此时不重建的地方的特征都由输入图片决定),然后不替换需要重建区域的latent,利用unet计算噪声更新需要重建的地方。

Pipeline的__call__函数就是整个生成推理环节的代码:
@torch.no_grad()
def __call__(
self,
prompt: Union[str, List[str]] = None,
image: PipelineImageInput = None,
mask_image: PipelineImageInput = None,
masked_image_latents: torch.FloatTensor = None,
height: Optional[int] = None,
width: Optional[int] = None,
padding_mask_crop: Optional[int] = None,
strength: float = 1.0,
num_inference_steps: int = 50,
timesteps: List[int] = None 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2591
2591











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











