






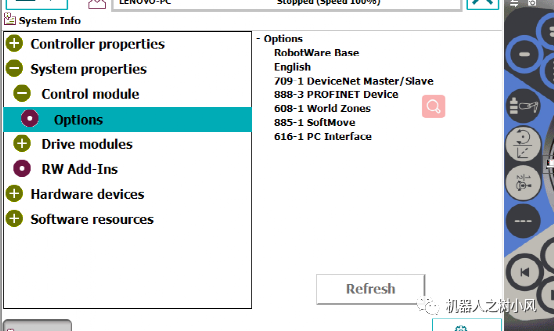
SoftMove是一个笛卡尔软伺服运动。使用时需要在控制器上装上SoftMove选项,在示教器上显示如下:
 一、SoftMove选项介绍
一、SoftMove选项介绍
1、SoftMove用于在预定方向上降低机器人的刚度,而在其他方向上主要保持原有行为。当使用SoftMove时,机器人的行为将被修改。机器人可能不总是遵循一个程序设定的路径,一些功能,例如碰撞检测,是无效的。
2、该功能可以单独使用,也可以与移动指令结合使用。
当单独使用该功能时,一个典型的应用是推料机,机器人将跟随推料机的运动。
当与移动指令结合使用时,机器人在非软方向上主要遵循有序路径,而在软方向上允许较大的位置偏差。如果工件位置在指定方向上有变化,这是有用的,从而使机器人遵循这些变化,避免硬碰撞。
3、当按下程序停止时,机器人仍然是软的-也就是说,SoftMove仍然是激活的。然而,CSSForceOffsetAct施加的任何力量将被删除。当使用快速停止指令时也是如此。
4、当进入马达关闭状态时,刹车生效,机器人不软。除非系统参数“Automatic reactivation of css disabled”设置为“Yes”,否则“SoftMove”会在“Motors On”状态下恢复。
5、当使用SoftMove时,正确定义工具数据是非常重要的,特别是质量。负载定义中的错误将被解释为外力,这反过来会导致机器人移动。因此,错误的定义会导致机器人运动。
二、使用SoftMove时的限制:
1、SoftMove不适用于4轴机器人。
2、SoftMove不能与MultiMove Coordinated (604 - 1)选项一起工作.
3、SoftMove不能与关节软伺服结合(指令SoftAct)。
4、当SafeMove与SoftMove一起使用时,存在伺服滞后问题的风险。
关于SoftMove具体的使用如遇到问题,还需要参考更多资料。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











