






学习ROS首先要了解一个重要概念:节点。ROS以及ROS2中的节点(node)是一个执行单元,也是最小的进程单元。一个节点就是ROS中一个可执行程序,并与其他节点进行通信。节点也是执行具体任务的进程、能够独立运行的可执行文件,不同节点可使用不同的编程语言,可分布式运行在不同的主机上。需要注意的是节点在系统中的名称必须是唯一的。
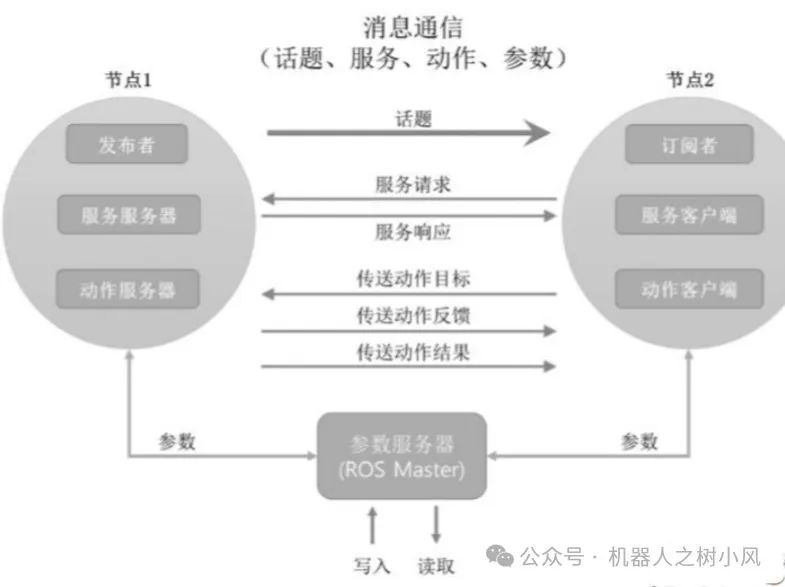
ROS的通信是整个系统中的核心部分,有以下几种方式:
①话题(topic):单向消息发送/接收方式,异步通信模式;
②服务(service):双向消息请求/响应方式,同步通讯方式;
③参数服务器(parameter service):节点存储参数的地方、用于配置参数,全局共享参数,更加静态;
④动作(action):类似service通信机制,通过消息进行数据的交流通信。
1、topic: 使用发布/订阅模型,数据由发布者传输到订阅者。特点:
①通信方式是异步的,发送时调用publish( )方法,发送完成立即返回,不用等待反馈。
②subscriber通过回调函数的方式来处理消息。回调就是提前定义好了一个处理函数(写在代码中),当有消息来就会触发这个处理函数,函数会对消息进行处理。
③topic可以同时有多个subscribers,也可以同时有多个publishers。
2、service
①双向、同步、非周期性、非实时的请求-查询式通信方式;
②使用客户端/服务端(C/S)模型,客户端发送请求数据,服务器完成后处理应答数据;
③使用编程语言无关的.srv文件定义请求和应答数据结构,编译过程中生成对应的代码文件。
Topic VS Service
更多内容在公众号查看合集。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











