







1 TinyEKF简介
TinyEKF是一个简洁的C/C++实现扩展卡尔曼滤波器,通用性足够适应不同的项目。为了能在Arduino、STM32和其他微控制器上实用,它使用静态(编译时)内存分配(不使用“new”或“malloc”)。examples文件夹包含了一个Arduino传感器融合的示例。python文件夹提供了一个抽象的Python类,可在实现C/C++版本之前用于原型设计你的EKF。c文件夹则包含了从文献中提取的一个纯C示例。 除了类定义之外,python文件夹还包含了一个使用OpenCV进行鼠标追踪的例子。
2 下载和使用
github:GitHub - simondlevy/TinyEKF: Lightweight C/C++ Extended Kalman Filter with Python for prototypinggitcode:
https://gitcode.com/gh_mirrors/ti/TinyEKF
VSCode运行examples文件中的GPS示例
拷贝以下文件至文件夹GPS(新建的),其中gps.c为主程序文件、tinyekf.h包含矩阵运算相关实现函数、tinyekf_custom.h为EKF相关实现。data.csv为输入数据(25个历元,每个历元包含四个卫星的卫星位置和伪距信息)。
修改gps.c中的38行为#include "tinyekf.h"
生成tasks.json,修改如下:
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
{
"type": "shell",
"label": "task g++",
"command": "C://Mingw//bin//g++.exe",
"args": [
"-g", //g++ -g
"${file}", //g++ -g main.cpp
"-o", //g++ -g main.cpp -o
"${fileDirname}\\${fileBasenameNoExtension}.exe" //g++ -g main.cpp -o main.exe
],
"options": {
"cwd": "${workspaceFolder}"
},
"problemMatcher": [
"$gcc"
],
"group": {
"kind": "build",
"isDefault": true
},
"presentation": {
"panel": "shared"
}
}
]
}主要是“label”、“command”修改为mingw中g++.exe的路径。
生成launch.json,修改如下:
{
// 使用 IntelliSense 了解相关属性。
// 悬停以查看现有属性的描述。
// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "(gdb) 启动",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/GPS.exe",
"args": [],
"stopAtEntry": false,
"cwd": "${fileDirname}",
"environment": [],
"externalConsole": true,
"preLaunchTask": "task g++",
"MIMode": "gdb",
"miDebuggerPath": "C://Mingw//bin//gdb.exe",
"setupCommands": [
{
"description": "为 gdb 启用整齐打印",
"text": "-enable-pretty-printing",
"ignoreFailures": true
},
{
"description": "将反汇编风格设置为 Intel",
"text": "-gdb-set disassembly-flavor intel",
"ignoreFailures": true
}
]
}
]
}主要是“externalConsole”、“preLaunchTask”、“miDebuggerPath”修改为mingw中gdb.exe的路径。
启动调试,编译成功,生成gps.exe可执行文件,运行后会输出滤波后的信息,保存在ekf.csv文件(每个历元接收机三维位置坐标和均值的差,类似于内符合定位精度)。
也可以在终端模式下运行gps.exe,打印输出程序运行的过程信息。
PS D:\Code\GPS> ./gps.exe
-2168832.046599 4386648.214558 4077172.040538
-2168842.841785 4386642.214172 4077173.870056
-2168843.744546 4386634.668619 4077171.952913
-2168843.742457 4386633.936942 4077169.866798
-2168840.351514 4386628.715729 4077167.463885
-2168839.619778 4386629.539772 4077162.256815
-2168838.139864 4386628.789142 4077160.520987
-2168837.432772 4386630.022548 4077153.928978
-2168837.981923 4386630.330923 4077149.492329
-2168836.230377 4386631.014996 4077148.314651
-2168835.019312 4386631.603244 4077148.329497
-2168837.009183 4386632.124964 4077149.212523
-2168836.705634 4386631.741776 4077151.144711
-2168835.865006 4386634.674140 4077148.979793
-2168837.991263 4386635.118928 4077146.292717
-2168837.733108 4386633.708690 4077151.856962
-2168837.660127 4386631.506054 4077155.242967
-2168837.468891 4386630.028514 4077153.616101
-2168837.442410 4386628.462408 4077156.958052
-2168838.108622 4386629.903104 4077155.022734
-2168837.461297 4386630.196597 4077155.138330
-2168837.575316 4386631.382120 4077152.899554
-2168837.721694 4386632.142844 4077151.405572
-2168839.291288 4386632.204313 4077154.409793
-2168839.402538 4386633.018873 4077153.767335
Wrote file ekf.csv
PS D:\Code\GPS>3 EKF实现GPS位置求解代码gps_ekf分析
TinyEKF例程中的GPS位置求解,是参考gps_ekf: TinyEKF test case using You Chong's GPS example: http://www.mathworks.com/matlabcentral/fileexchange/31487-extended-kalman-filter-ekf--for-gps。将具体MATLAB算法通过C语言实现,为了更好的理解TinyEKF,可以先看gps_ekf的matlab代码。下载运行,结果如下图所示:
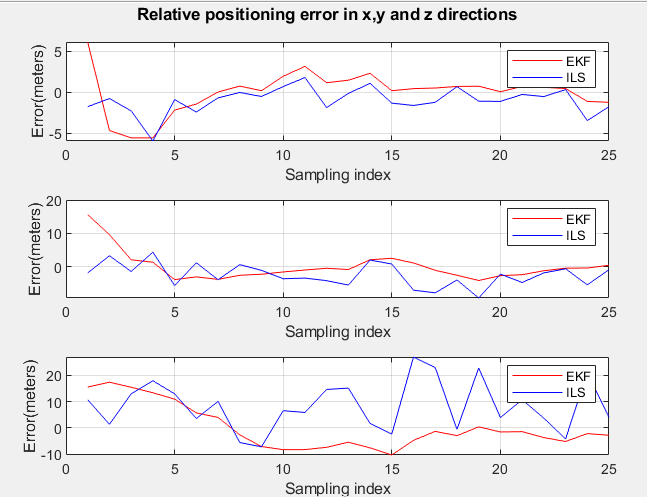
上图为GPS接收机三维坐标的扩展卡尔曼滤波和最小二乘法结果的对比,明显看到EKF更平滑,误差更小。接下来,详细看一下gps_ekf的算法设计。
根据GPS定位原理,伪距方程为:
其中,Xs 和 X 分别表示卫星和接收器的位置,|| Xs - X || 表示它们之间的距离。b 表示接收器的时钟偏差,需要与接收器的位置一起求解。rho 是接收器对每颗卫星的测量值(伪距),v 是伪距测量噪声,建模为白噪声。算法说明如下:
算法结构:
状态方程:
其中状态的维度为
;
观测方程 :
其中:
观测值 的维度为
;
是协方差为
的高斯噪声 ;
是协方差为
的高斯噪声;
算法输入:
:状态转移函数,它接受一个状态变量
,并返回
和
在
处的雅可比矩阵。
作为一个假想的例子:
function [Val, Jacob] = f(X)
Val = sin(X) + 3;
Jacob = cos(X);
end : 测量函数,它接收状态变量
并返回
和
在
处的雅可比矩阵;
: 过程噪声协方差矩阵,N×N ;
: 测量噪声协方差矩阵,M×M;
: 当前测量值,M×1;
: 先验状态估计值,N×1;
:先验估计状态协方差矩阵,N×N;
算法输出:
: 后验状态估计值,N×1;
: 后验估计状态协方差矩阵,N×N维矩阵
算法流程:
扩展卡尔曼滤波算法:将输入函数 和
线性化,得到普通卡尔曼滤波的状态转移矩阵
和观测矩阵
。
状态方程:
观测方程 :
具体算法步骤为:
-
: 一步投影,线性化点;
-
: 线性化状态方程,
是过程模型的雅可比矩阵;
:线性化观测方程,
是测量模型的雅可比矩阵;
-
:计算
的协方差;
:计算卡尔曼增益
:计算 状态估计
:计算
的协方差
function [Xo,Po] = Extended_KF(f,g,Q,R,Z,Xi,Pi)
N_state = size(Xi, 1);
[Xp, ~] = f(Xi);%1
[~, fy] = f(Xp);%2
[gXp, H] = g(Xp);%3
Pp = fy * Pi * fy.' + Q;%4
K = Pp * H' / (H * Pp * H.' + R);%5
Xo = Xp + K * (Z - gXp);%6
I = eye(N_state, N_state);
Po = (I - K * H) * Pp;%7
end3.1状态转移函数f(x)
假定接收机运动为匀速模型,需估计的状态量的维度为
,即每次需估计8个未知量,依次为接收机x,y,z方向的坐标和速度(px,vx,py,vy,pz,vz),clk(接收机钟差),clk_drift(接收机钟飘,即钟差变化率)。
初始化接收机坐标为(-2.168816181271560e+006 ,4.386648549091666e+006, 4.077161596428751e+006),速度为(0,0,0)。钟差为3.575261153706439e+006(m),钟飘为4.549246345845814e+001(m/s);
根据接收机运动模型为匀速的假设,可得
假设接收机短时间内的钟飘稳定则,
可得雅可比矩阵为:
,T为历元周期,本例中为1s。
具体实现如下:
X = zeros(8,1);
X([1 3 5]) = [-2.168816181271560e+006
4.386648549091666e+006
4.077161596428751e+006]; %Initial position
X([2 4 6]) = [0 0 0]; %Initial velocity
X(7,1) = 3.575261153706439e+006; %Initial clock bias
X(8,1) = 4.549246345845814e+001; %Initial clock driftf = @(X) ConstantVelocity(X, T);% Constant Velocity model for GPS navigation.
function [Val, Jacob] = ConstantVelocity(X, T)
Val = zeros(size(X));
Val(1:2:end) = X(1:2:end) + T * X(2:2:end);
Val(2:2:end) = X(2:2:end);
Jacob = [1,T; 0,1];
Jacob = blkdiag(Jacob,Jacob,Jacob,Jacob);
end3.2 测量函数g(x)
根据GPS定位原理,每个卫星的伪距方程可表示为:,其中,|| P_s - P || 表示,卫星和接收机的几何距离,b为接收机钟差clk,v为误差。
通常接收机得到多个卫星的观测量值即伪距rho和卫星的位置信息P_s ,通过求解方程的方式,得到接收机的坐标P和钟差b。如果我们得到当前时刻接收机的位置坐标估计Xp和钟差估计值clkp,再加上已知的卫星坐标P_s,就可以计算出当前时刻测量值的估计。
上式改写为
对上式的X方向求偏导得到
其他方向同理可得。定义dx,dy,dz为卫星与接收机坐标的差(上式的分子),r为卫星与接收机的几何距离(上式的分母)。可得伪距测量模型的雅可比矩阵为:
,
% Set g: pseudorange equations for each satellites
g = @(X) PseudorangeEquation(X, SV_Pos{ii}); % Compute Val = || Xs - X || + b and its Jacobian.
function [Val, Jacob] = PseudorangeEquation(X, SV)
% Each row of SV is the coordinate of a satellite.
dX = bsxfun(@minus, X([1,3,5])', SV);% X - Xs
Val = sum(dX .^2, 2) .^0.5 + X(7);
Jacob = zeros(size(SV, 1), size(X, 1));
Jacob(:, [1,3,5]) = bsxfun(@rdivide, dX, Val);
Jacob(:, 7) = 1;
end3.3 状态估计X的协方差矩阵P
初始化为对角阵,每个元素均为10;
P = eye(8)*10;后续更新迭代。
Pp = fy * Pi * fy.' + Q;%43.4 测量噪声协方差矩阵R
初始化为对角阵,每个元素均为36;36为经验值,单位为m;
% Set R
Rhoerror = 36; % variance of measurement error(pseudorange error)
R = eye(size(SV_Pos{ii}, 1)) * Rhoerror; 3.5 过程噪声协方差矩阵Q
% Set Q, see [1]
Sf = 36;Sg = 0.01;sigma=5; %state transition variance
Qb = [Sf*T+Sg*T*T*T/3 Sg*T*T/2;
Sg*T*T/2 Sg*T];
Qxyz = sigma^2 * [T^3/3 T^2/2;
T^2/2 T];
Q = blkdiag(Qxyz,Qxyz,Qxyz,Qb);deepseek分析如下:
% 设置过程噪声协方差矩阵Q,参考[1]
Sf = 36; % 时钟零偏的功率谱密度(单位:m²/s³)
Sg = 0.01; % 时钟零偏随机游走的功率谱密度(单位:m²/s⁵)
sigma = 5; % 运动学状态的过程噪声标准差(单位:m/s²
Sf*T:零偏稳定性噪声的离散积分(相关时间内的累积效应,Sg*T^3/3:随机游走噪声的三阶项,体现零偏变化率的平方增长,Sg*T^2/2 表示零偏与零偏变化率的相关性;
运动学协方差矩阵 Qxyz
- 假设加速度为白噪声,对运动学方程进行两次积分:
- 位置方差 ∝ ∫∫a(t)dt ⇒ T³项
- 速度方差 ∝ ∫a(t)dt ⇒ T项
- 物理意义:
T^3/3:位置噪声协方差(单位:m²)T:速度噪声协方差(单位:(m/s)²
3.6 完整代码
for ii = 1:N
% Set g: pseudorange equations for each satellites
g = @(X) PseudorangeEquation(X, SV_Pos{ii});
% Set R
Rhoerror = 36; % variance of measurement error(pseudorange error)
R = eye(size(SV_Pos{ii}, 1)) * Rhoerror;
% Set Z
Z = SV_Rho{ii}.'; % measurement value
[X,P] = Extended_KF(f,g,Q,R,Z,X,P);
Pos_KF(:,ii) = X([1 3 5]).'; % positioning using Kalman Filter
endSV_Pos为卫星的三维坐标、Z为伪距测量值。
3.7 总结
理解gps_ekf matlab 代码的EKF实现原理,再看TinyEKF例程中的GPS位置求解C代码,就顺畅轻松很多!

















 5563
5563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









