







原文链接
目录
论文总结:基于双目视觉的柔性扑翼三维运动重建与同步误差校正方法
论文总结:基于双目视觉的柔性扑翼三维运动重建与同步误差校正方法
研究背景
- 研究动机:受鸟类飞行启发,扑翼机器人(FWRs)因其高升力、高推进效率和低噪音等优势成为研究热点。柔性扑翼的变形对气动性能有显著影响,需精确测量其运动参数和形变。
- 挑战:传统接触式测量(如传感器贴附)会干扰翼面;非接触式方法(如条纹投影)易受环境光干扰。双目视觉系统(BVS)在高速运动目标跟踪和同步误差方面存在技术难题。
主要贡献
-
自适应核相关滤波算法(AKCF)
- 基于目标尺度预测,提升高速运动椭圆目标的跟踪精度和鲁棒性。
- 在扑翼频率为3 Hz时,跟踪精度和成功率分别比传统KCF和STC算法提高24.67%和12.17%。
-
启动时间差(STD)误差模型与校正方法
- 提出异步触发相机的同步误差校正方案,将STD误差降至百微秒级(416.66 μs)。
- 通过虚拟插值帧匹配和光信号参考,实现与工业相机外触发模式相当的同步精度。
-
红外运动捕捉系统(IMCS)辅助误差补偿
- 利用IMCS的高精度数据(亚毫米级)评估BVS误差,补偿后BVS的平均误差最大值为1.352 mm,最小相似度为0.996。
方法与技术
-
双目视觉系统(BVS)设计
- 硬件配置:采用DJI Osmo Action运动相机(分辨率1920×1080,帧率240 fps),基线长度400 mm,优化空间布局以覆盖翼面运动范围。
- 标记点设计:直径20 mm的圆形标记,结合红外反射标记,手动对齐误差≤0.1 mm。
-
椭圆拟合与目标跟踪
- Canny边缘检测+最小二乘法椭圆拟合:提取标记中心坐标。
- AKCF算法:通过HOG特征和核函数映射,动态调整跟踪框尺寸以适应目标形变。
-
误差分析与校正
- 标定误差:MATLAB标定工具箱验证,最大理论误差0.0403 mm。
- 匹配误差:基线长度优化至400 mm,减小深度方向误差。
- STD误差校正:基于LED信号和插值帧匹配,确定精确时间差并补偿。
实验结果
-
静态翼面重建
- 平均误差:0.25–1.032 mm(随翼面倾斜角增加)。
- 相似度(PCCS):最小0.997,验证BVS与IMCS数据一致性。
-
动态翼面重建
- 扑翼频率影响:频率越高,平均误差越大(1 Hz: 2.30 mm,3 Hz: 4.01 mm);补偿后误差降至1.35 mm(3 Hz)。
- 翼尖轨迹:呈现“8”字形模式,与自然界生物飞行轨迹一致,验证气动效率。
-
误差补偿效果
- Z方向误差:补偿后最大误差从14.7 mm降至3.7 mm(3 Hz),相对位移误差≤0.617%。
结论与展望
- 结论:BVS结合AKCF算法和STD校正,可实现柔性扑翼的高精度三维重建,误差控制在毫米级,相似度>0.996。
- 未来方向:
- 采用多相机同步触发提升数据处理效率;
- 优化标记分布(翼尖和尾缘增加密度);
- 开发同心圆检测技术消除投影偏心误差。
应用潜力
- 该技术可扩展至航天柔性结构(如太阳能帆板)的形变测量,为高速运动目标的动态建模提供通用解决方案。
多相机同步触发的具体实现方法
多相机同步触发是确保多个摄像头在同一时刻或严格时间对齐下采集图像的关键技术,尤其在高速运动测量、三维重建、工业检测等领域至关重要。以下是具体实现方法及技术细节:
1. 硬件同步触发
原理
通过外部硬件设备(如触发器、同步控制器)向所有相机发送统一电脉冲信号,直接控制相机的快门或采集动作,实现亚微秒级同步精度。
实现步骤
-
选择支持外部触发的相机
- 工业相机(如Basler、FLIR)通常配备触发输入接口(GPIO、BNC接口)。
- 示例配置:相机设置为“外触发模式”(External Trigger),通过
TriggerMode=On激活。
-
配置同步信号发生器
- 硬件设备:使用同步控制器(如National Instruments DAQ)、Arduino、PLC,或专用触发器(如Pulse Generator)。
- 信号类型:TTL(晶体管-晶体管逻辑)脉冲(5V电平)、光耦隔离信号(抗干扰)或RS-422差分信号(长距离传输)。
-
连接触发信号线
- 星型拓扑:同步控制器通过分线器(Splitter)将触发信号分发至所有相机(避免信号衰减)。
- 菊花链拓扑:主相机触发信号串联至从相机(需支持触发信号级联输出)。
-
校准延迟时间
- 不同相机对触发信号的响应时间可能存在微秒级差异(如曝光延迟、信号传输延迟)。
- 校准方法:
- 使用高速光电二极管或LED光源,测量各相机实际曝光时间差。
- 在触发信号中引入补偿延迟(通过同步控制器的软件或固件设置)。
2. 软件同步触发
原理
通过软件指令(API、网络协议)控制多相机同时启动采集,适用于无硬件触发接口的消费级相机(如USB摄像头、运动相机)。
实现步骤
-
统一时钟源
- 所有相机通过NTP(网络时间协议)或PTP(精确时间协议)同步系统时钟(适用于局域网环境)。
- 示例:IEEE 1588 PTP协议可实现亚微秒级时钟同步。
-
软件触发指令
- 同步API调用:通过SDK(如OpenCV、PySpin)发送同步采集指令。
python
# 示例:使用PySpin控制FLIR相机同步for camera in camera_list:camera.BeginAcquisition()for camera in camera_list:camera.EndAcquisition() - 网络广播:通过UDP/TCP广播发送触发指令(需相机支持网络协议)。
- 同步API调用:通过SDK(如OpenCV、PySpin)发送同步采集指令。
-
后处理时间戳对齐
- 采集时记录每帧图像的时间戳(精确到微秒)。
- 使用插值算法(如线性插值)对齐时间轴,补偿软件触发的随机延迟。
3. 混合同步方案(硬件+软件)
适用场景
相机硬件触发能力有限(如无GPIO接口),需结合软件优化同步精度。
实现方法
-
主从相机架构
- 主相机通过硬件触发,从相机通过软件API同步。
- 示例:DJI Osmo Action相机通过LED光信号(硬件)触发,其他相机通过OpenCV检测光信号(软件)启动采集。
-
光信号同步
- 使用高亮度LED作为同步信号源,所有相机检测光脉冲并记录时间戳。
- 通过光脉冲的上升沿对齐图像序列(需高速快门,如1/1000秒)。
4. 论文方案扩展:基于STD误差模型的同步校正
背景
在异步触发相机(如手动启动)场景下,论文提出通过启动时间差(STD)建模和虚拟插值实现同步。
具体步骤
-
标定启动时间差(STD)
- 使用LED光信号作为参考,记录左右相机首次检测到光信号的帧号差异(如左相机第1帧对应右相机第18帧)。
- 通过多周期测量统计STD均值(如17.9帧差异)。
-
虚拟插值生成同步帧
- 在相邻真实帧之间插入虚拟帧(如线性插值生成9个虚拟帧)。
- 匹配左右相机的时间轴,误差可降至0.1帧(约416微秒)。
-
动态补偿运动误差
- 建立STD与目标运动速度的关联模型(误差∝速度×STD)。
- 通过IMCS(红外运动捕捉系统)提供的高精度轨迹数据反向校准BVS时序。
5. 实际应用案例
案例1:工业检测中的多相机同步
- 硬件:Basler acA2440相机 + NI DAQ同步控制器。
- 配置:
- 触发信号频率 = 采集帧率(如60 Hz)。
- 信号线长度≤5米(避免信号衰减)。
- 精度:同步误差<1 μs。
案例2:无人机扑翼运动捕捉
- 硬件:DJI Osmo Action相机 + Arduino触发器。
- 配置:
- Arduino发送TTL脉冲至所有相机的USB Trigger接口。
- 相机固件修改为“外触发优先模式”。
- 精度:同步误差≈200 μs(经插值后可达50 μs)。
6. 技术选型对比
| 方法 | 精度 | 成本 | 适用场景 |
|---|---|---|---|
| 硬件触发 | 亚微秒级 | 高(需专用设备) | 工业检测、高速实验 |
| 软件触发 | 毫秒级 | 低(依赖API) | 消费级相机、低速场景 |
| 光信号同步 | 百微秒级 | 中 | 无硬件触发接口的相机 |
| STD误差校正 | 百微秒级 | 低 | 异步触发相机的后期同步 |
总结
多相机同步触发的核心在于硬件信号精度与后期校准能力的结合:
- 优先选择硬件触发方案(如工业相机+同步控制器)。
- 若受限于设备接口,可采用光信号同步或STD误差校正(如论文方案)。
- 软件同步需依赖高精度时钟和插值算法,适合低成本场景。
通过合理设计同步策略,可满足从微秒级工业检测到毫秒级生物运动分析的全场景需求。
AKCF算法的优化方向
基于论文《1-s2.0-S0263224124002720-main》中提出的自适应核相关滤波(AKCF)算法及其在扑翼运动跟踪中的应用,以下是该算法未来可能的优化方向:
1. 特征提取与融合
- 问题:当前AKCF使用HOG(方向梯度直方图)特征,对复杂形变和光照变化的适应性有限。
- 优化方向:
- 多特征融合:结合深度特征(如CNN浅层特征)与HOG特征,提升对目标纹理和轮廓的联合表征能力。
- 动态特征选择:根据目标运动状态(如高速形变或静态)自适应选择最优特征组合。
- 轻量化特征网络:设计轻量级CNN(如MobileNet)替代HOG,平衡精度与实时性。
2. 尺度预测与形变建模
- 问题:当前通过椭圆拟合和矩形框面积变化预测目标缩放比例,但对非均匀形变(如扭曲、折叠)的适应性不足。
- 优化方向:
- 形变参数建模:引入仿射变换或薄板样条(TPS)模型,直接预测目标的局部形变参数。
- 多尺度搜索策略:采用分层金字塔或分块跟踪,增强对极端尺度变化的鲁棒性。
- 动态缩放因子学习:通过在线学习调整缩放预测的置信度权重,减少误判。
3. 抗遮挡与重检测机制
- 问题:扑翼运动中标记点可能被其他部件遮挡或短暂消失。
- 优化方向:
- 遮挡感知模型:通过响应图置信度或特征相似度实时检测遮挡,暂停模型更新。
- 记忆增强策略:引入短期记忆模块(如LSTM)保存历史轨迹,遮挡后通过轨迹预测恢复跟踪。
- 重检测触发机制:结合全局搜索或光流法在丢失目标后重新定位。
4. 实时性与计算效率
- 问题:AKCF在240 fps的高帧率场景中需进一步降低计算开销。
- 优化方向:
- 并行化加速:利用GPU并行计算优化HOG提取、FFT变换等密集运算步骤。
- 稀疏采样策略:减少候选样本数量(如仅搜索高概率区域),降低相关滤波计算量。
- 模型量化与剪枝:对分类器权重进行低精度量化或稀疏化,提升内存访问效率。
5. 动态环境适应性
- 问题:扑翼运动伴随剧烈光照变化、运动模糊和背景干扰。
- 优化方向:
- 光照不变特征:引入局部二值模式(LBP)或相位特征(Phase Features)增强抗光照变化能力。
- 运动模糊补偿:通过去模糊预处理(如维纳滤波)或模糊不变特征提升鲁棒性。
- 背景抑制机制:结合显著性检测或背景建模(如GMM)减少背景干扰。
6. 多目标跟踪扩展
- 问题:当前AKCF专注于单目标跟踪,扑翼机器人可能存在多个标记点需同时跟踪。
- 优化方向:
- 多任务学习框架:共享特征提取网络,并行处理多个目标的定位与尺度预测。
- 交互建模:通过图神经网络(GNN)建模目标间的运动关联(如刚性连接约束)。
- 冲突避免机制:在目标重叠时优先跟踪高置信度区域,避免误匹配。
7. 在线学习与模型更新
- 问题:固定学习率可能导致模型过拟合或欠适应。
- 优化方向:
- 自适应学习率:根据跟踪置信度动态调整模型更新速率(如高置信度时降低学习率)。
- 增量式样本选择:仅保留最具代表性的正负样本,避免样本污染。
- 元学习初始化:预训练元模型(Meta-Tracker)快速适应新目标。
8. 硬件协同设计
- 问题:现有算法未充分利用硬件特性(如嵌入式平台算力限制)。
- 优化方向:
- FPGA/ASIC加速:定制化硬件实现HOG提取和FFT运算,降低功耗。
- 传感器融合:结合IMU数据预测目标运动趋势,缩小搜索区域。
- 端侧部署优化:针对移动设备(如无人机载平台)进行模型轻量化与内存优化。
9. 与同步误差校正的深度协同
- 问题:论文中同步误差校正(STD补偿)与跟踪算法独立,可能引入延迟。
- 优化方向:
- 联合优化框架:将STD误差模型嵌入AKCF的尺度预测模块,实时补偿时间差影响。
- 动态时间戳对齐:在跟踪过程中融合IMCS的时间戳信息,提升跨系统数据一致性。
总结
AKCF算法在扑翼运动跟踪中展现出优势,但仍有多个优化维度可探索。未来的工作可从特征增强、形变建模、抗遮挡设计、硬件协同等方向切入,结合深度学习与传统滤波方法的优势,进一步提升其在复杂动态场景下的鲁棒性和实时性。同时,针对扑翼机器人的运动特性(如周期性、非线性轨迹),定制化优化策略将更具实际价值。
多特征融合的具体实现方法
多特征融合是提升目标跟踪鲁棒性的重要手段,尤其在复杂场景(如扑翼形变、光照变化、运动模糊)中,通过融合互补特征可增强算法对目标的表征能力。以下是具体实现方法及技术细节,结合论文中AKCF算法的应用场景:
1. 特征选择与提取
核心原则
选择具有互补性的特征组合,例如:
- HOG特征:对目标轮廓和边缘敏感,抗光照变化。
- CNN特征(如VGG、ResNet浅层特征):捕捉局部纹理和语义信息。
- 颜色特征(如Color Names、Color Histogram):区分目标与相似背景。
- 光流特征:反映目标运动趋势,补偿形变影响。
实现步骤
-
特征提取器设计
- HOG:使用滑动窗口提取局部梯度方向直方图(默认参数:Cell Size=4×4,Block Size=2×2)。
- 轻量化CNN:预训练MobileNetV2的前3层(输出尺寸为32×32×32)作为纹理特征。
- 颜色直方图:在HSV空间计算目标区域的色调-饱和度直方图(Bins=16)。
-
实时性优化
- 并行提取:利用多线程或GPU加速(如CUDA)同时计算不同特征。
- 下采样与裁剪:对高分辨率特征图(如CNN)进行区域裁剪,仅保留目标周围区域。
2. 特征融合策略
(1)特征级融合(早期融合)
将不同特征在输入阶段直接拼接,形成高维联合特征向量。
-
实现方法:
- 归一化处理:对HOG、CNN特征分别进行L2归一化,避免量纲差异。
- 维度对齐:通过插值或池化调整特征图尺寸(如将HOG从40×40下采样至32×32)。
- 通道拼接:沿通道维度拼接HOG(32×32×36)、CNN(32×32×32)、颜色(32×32×16),得到联合特征(32×32×84)。
-
优势:保留原始特征空间信息,适合端到端训练。
-
缺点:计算量大,需设计高效融合网络。
(2)决策级融合(后期融合)
对不同特征独立训练分类器,通过加权投票或概率融合生成最终响应。
-
实现方法:
- 独立训练:
- HOG特征训练KCF分类器,得到响应图 RHOG R_{\text{HOG}} RHOG。
- CNN特征训练线性SVM,得到响应图 RCNN R_{\text{CNN}} RCNN。
- 动态权重分配:
-
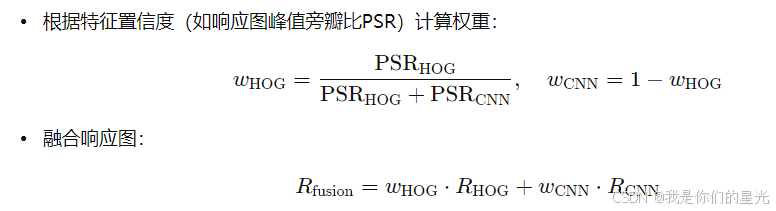
根据特征置信度(如响应图峰值旁瓣比PSR)计算权重:
wHOG=PSRHOGPSRHOG+PSRCNN,wCNN=1−wHOG w_{\text{HOG}} = \frac{\text{PSR}_{\text{HOG}}}{\text{PSR}_{\text{HOG}} + \text{PSR}_{\text{CNN}}}, \quad w_{\text{CNN}} = 1 - w_{\text{HOG}} wHOG=PSRHOG+PSRCNNPSRHOG,wCNN=1−wHOG
-
融合响应图:
Rfusion=wHOG⋅RHOG+wCNN⋅RCNN R_{\text{fusion}} = w_{\text{HOG}} \cdot R_{\text{HOG}} + w_{\text{CNN}} \cdot R_{\text{CNN}} Rfusion=wHOG⋅RHOG+wCNN⋅RCNN
-
- 独立训练:
-
优势:灵活适应不同场景,计算开销较低。
-
缺点:需设计权重更新机制。
(3)注意力引导融合(混合策略)
通过注意力机制动态选择重要特征区域。
-
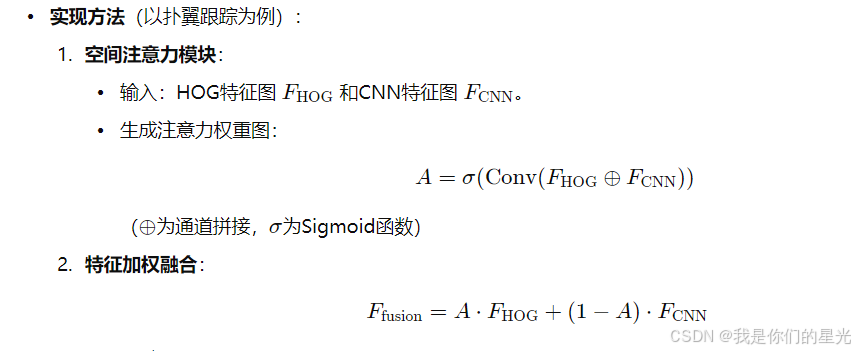
实现方法(以扑翼跟踪为例):
-
空间注意力模块:
-
输入:HOG特征图 FHOG F_{\text{HOG}} FHOG 和CNN特征图 FCNN F_{\text{CNN}} FCNN。
-
生成注意力权重图:
A=σ(Conv(FHOG⊕FCNN)) A = \sigma(\text{Conv}(F_{\text{HOG}} \oplus F_{\text{CNN}})) A=σ(Conv(FHOG⊕FCNN))
(⊕\oplus⊕为通道拼接,σ\sigmaσ为Sigmoid函数)
-
-
特征加权融合:
Ffusion=A⋅FHOG+(1−A)⋅FCNN F_{\text{fusion}} = A \cdot F_{\text{HOG}} + (1 - A) \cdot F_{\text{CNN}} Ffusion=A⋅FHOG+(1−A)⋅FCNN
-
-
优势:自适应聚焦关键区域,适合形变目标。
-
示例代码:
python
# PyTorch伪代码class AttentionFusion(nn.Module):def __init__(self):super().__init__()self.conv = nn.Conv2d(64, 1, kernel_size=1) # 输入通道=HOG(36)+CNN(32)self.sigmoid = nn.Sigmoid()def forward(self, hog_feat, cnn_feat):combined = torch.cat([hog_feat, cnn_feat], dim=1)attention = self.sigmoid(self.conv(combined))fused_feat = attention * hog_feat + (1 - attention) * cnn_featreturn fused_feat
3. 动态权重自适应
问题
固定权重无法适应目标形变、遮挡等动态变化。需在线调整不同特征的贡献度。
解决方案
-
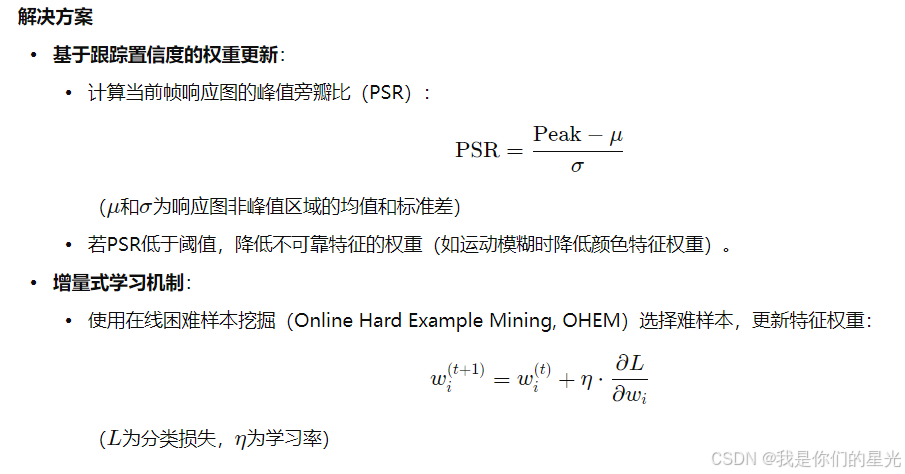
基于跟踪置信度的权重更新:
-
计算当前帧响应图的峰值旁瓣比(PSR):
PSR=Peak−μσ \text{PSR} = \frac{\text{Peak} - \mu}{\sigma} PSR=σPeak−μ
(μ\muμ和σ\sigmaσ为响应图非峰值区域的均值和标准差)
-
若PSR低于阈值,降低不可靠特征的权重(如运动模糊时降低颜色特征权重)。
-
-
增量式学习机制:
-
使用在线困难样本挖掘(Online Hard Example Mining, OHEM)选择难样本,更新特征权重:
wi(t+1)=wi(t)+η⋅∂L∂wi w_i^{(t+1)} = w_i^{(t)} + \eta \cdot \frac{\partial L}{\partial w_i} wi(t+1)=wi(t)+η⋅∂wi∂L
(LLL为分类损失,η\etaη为学习率)
-
4. 实际应用优化(针对扑翼跟踪)
(1)形变自适应特征选择
- 问题:扑翼高速形变导致HOG特征不稳定。
- 策略:
- 当检测到目标长宽比变化超过阈值时,增加CNN特征权重(纹理信息更稳定)。
- 使用光流特征补偿形变引起的位移误差。
(2)实时性保障
- 轻量化设计:
- 用Ghost模块替代标准CNN卷积层,减少计算量(参考GhostNet)。
- 对颜色直方图进行稀疏编码(如K-Means量化)。
- 硬件加速:
- 在FPGA上实现HOG并行计算(利用梯度方向预计算表)。
(3)遮挡处理
- 遮挡检测:
- 若所有特征的PSR同时下降,判定为遮挡,冻结模型更新。
- 特征恢复:
- 遮挡解除后,优先使用HOG特征重定位目标(轮廓信息恢复快)。
5. 实验验证与参数调优
评估指标
- 跟踪精度:CLE(中心定位误差)、OS(重叠率)。
- 鲁棒性:在形变、光照变化、遮挡等场景下的成功率。
- 实时性:单帧处理时间(需≤4ms以满足240fps需求)。
参数调优
- 特征权重初值:通过离线训练集网格搜索确定(如HOG:0.6, CNN:0.4)。
- 注意力网络结构:实验对比SE模块、CBAM等注意力机制的效果。
- 学习率调整:使用余弦退火策略平衡收敛速度与稳定性。
总结
多特征融合的实现需结合特征互补性设计、动态权重分配和硬件优化:
- 特征选择:HOG+CNN+颜色构成基础组合,光流辅助运动补偿。
- 融合策略:注意力机制优先用于形变场景,决策级融合适合实时系统。
- 工程落地:轻量化模型(如MobileNet)+ FPGA加速保障240fps实时性。
在扑翼机器人跟踪中,建议采用注意力引导的早期融合,配合动态权重更新和稀疏特征编码,以平衡精度与速度。最终系统可通过ROS节点部署,与IMCS数据实时同步校准。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









