






 博客围绕基于STM32的MFRC522展开,介绍了MFRC522的基本情况、接线方式和存储结构,重点对相关代码进行解析,包括rc522.h、rc522.c、spi.h、spi.c和main.c等文件,还提及main.h的函数声明及main.c部分函数由cumax自动生成。
博客围绕基于STM32的MFRC522展开,介绍了MFRC522的基本情况、接线方式和存储结构,重点对相关代码进行解析,包括rc522.h、rc522.c、spi.h、spi.c和main.c等文件,还提及main.h的函数声明及main.c部分函数由cumax自动生成。
完整项目可以看基于STM32的RFID智能门锁系统。
目录
一、MFRC522简介

店家提供的资料:
链接:
百度网盘 请输入提取码
提取码:su3m

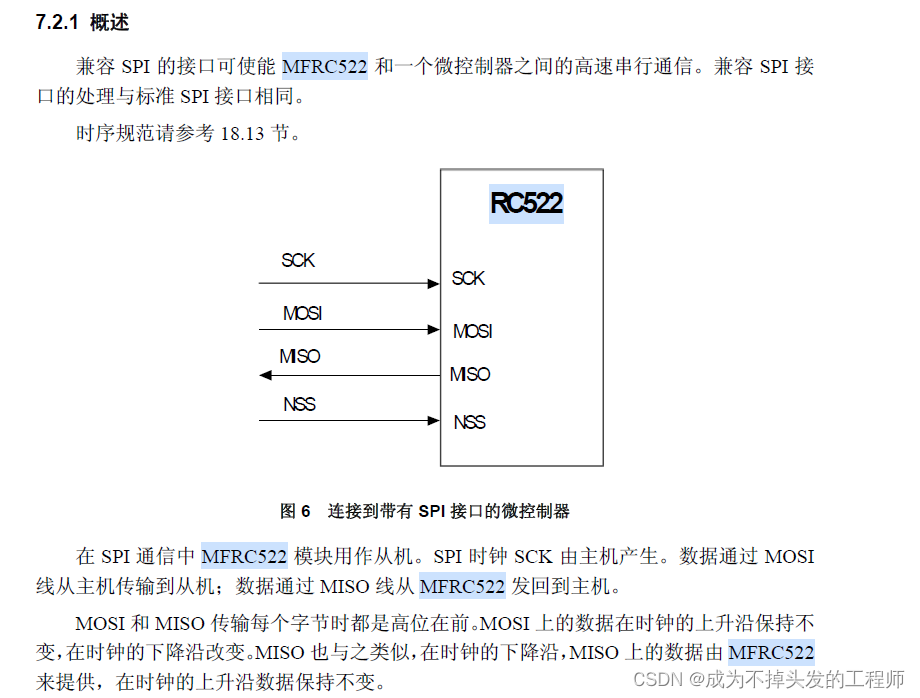
简言之,MFRCC522是基于SPI通信协议与主机进行通信的模块,可实现RFID无线通信,常用于门禁系统、支付系统等。SPI通信原理细节可看往期笔记。
STM32F4——SPI通信
本篇笔记主要介绍MFRC522模块。
二、接线
|
STM32
| RC522 |
| PB12 |
SDA
|
|
PB13
|
SCK
|
|
PB14
|
MISO
|
|
PB15
|
MOSI
|
|
悬空
|
IRQ
|
| GND |
GND
|
|
PB1
|
RST
|
|
VCC
|
VCC
|
使用SPI2,
记住主机的MOSI和从机的MOSI相连,不是交叉相连!!!!!!!

三、存储结构说明

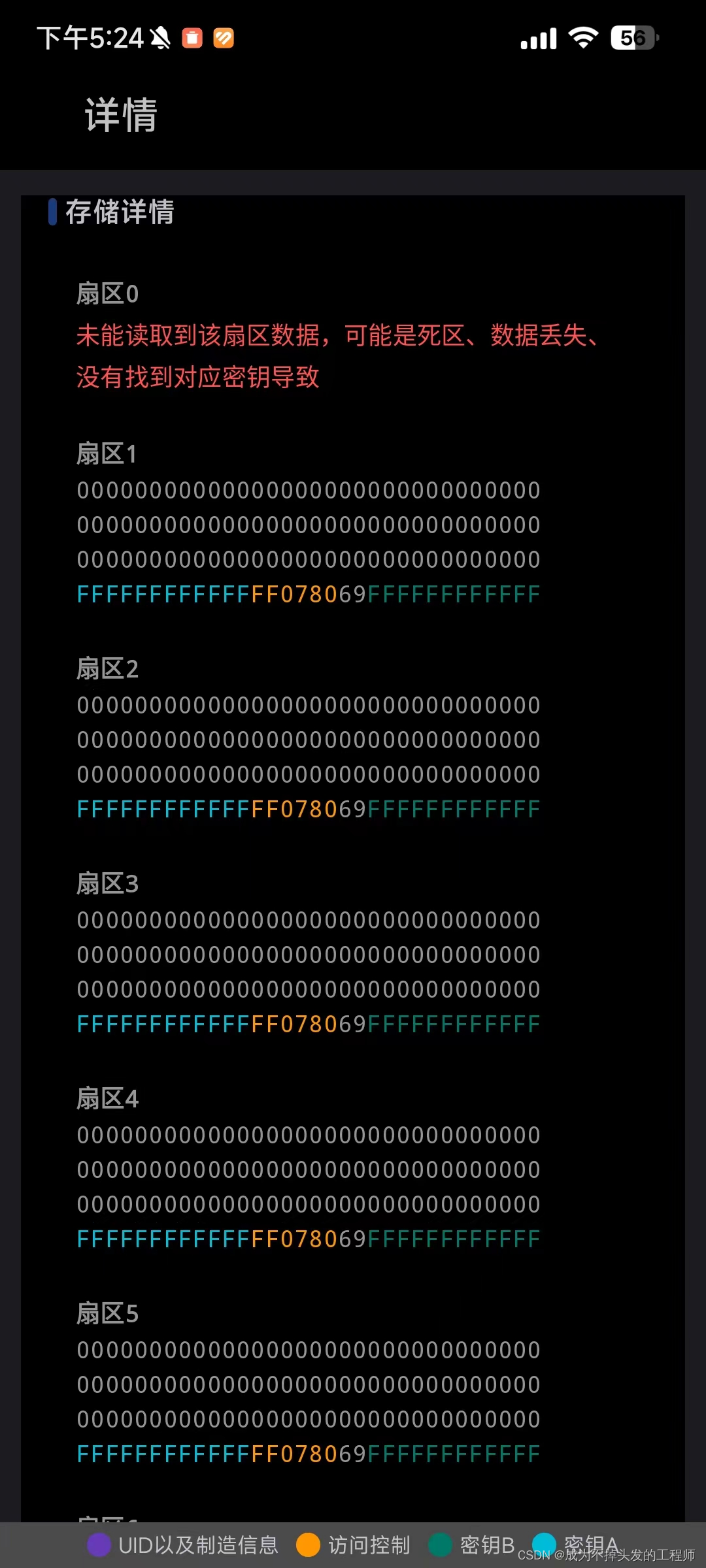
利用
软件NFC WRITER对NFC卡扇区内存进行管理,可以查看存储信息,通过串口打印出来的前六个字节000000000000存在错误,应该为FFFFFFFFFFFF。
在网上搜了资料,有些朋友说扇区0是不能够写修改的,由厂家初始化,笔者刚开始也可以读取出来,但由于不熟悉且手贱,刚开始在探究NFC卡扇区的读与写时,错误操作于在扇区0第3区块直接写入六个字节(F1FFFFFFFFFF),之后用软件读取不出扇区的内存信息,怀疑是损坏了或者丢失了。现在密码A仍然可以验证为我写入的F1FFFFFFFFFF,但是密码B不知道是什么,也无法对扇区0内存储信息进行读取。
四、代码解析
1、rc522.h
#ifndef _RC522_H
#define _RC522_H
#include "stm32f1xx_hal.h"
/* CS/NSS/SDA均表示片选 */
#define RC522_RST_Pin GPIO_PIN_1
#define RC522_RST_GPIO_Port GPIOB
#define RC522_CS_Pin GPIO_PIN_12
#define RC522_CS_GPIO_Port GPIOB
#define osDelay HAL_Delay
#define RS522_RST(x) do{ x ? \
HAL_GPIO_WritePin(RC522_RST_GPIO_Port, RC522_RST_Pin, GPIO_PIN_SET) :\
HAL_GPIO_WritePin(RC522_RST_GPIO_Port, RC522_RST_Pin, GPIO_PIN_RESET);\
}while(0)
#define RS522_NSS(x) do{ x ? \
HAL_GPIO_WritePin(RC522_CS_GPIO_Port, RC522_CS_Pin, GPIO_PIN_SET) :\
HAL_GPIO_WritePin(RC522_CS_GPIO_Port, RC522_CS_Pin, GPIO_PIN_RESET);\
}while(0)
/***********************************************************************************
* MFRC522驱动程序 *
************************************************************************************/
/*MFRC522寄存器定义*/
//PAGE0
#define MFRC_RFU00 0x00
#define MFRC_CommandReg 0x01
#define MFRC_ComIEnReg 0x02
#define MFRC_DivlEnReg 0x03
#define MFRC_ComIrqReg 0x04
#define MFRC_DivIrqReg 0x05
#define MFRC_ErrorReg 0x06
#define MFRC_Status1Reg 0x07
#define MFRC_Status2Reg 0x08
#define MFRC_FIFODataReg 0x09
#define MFRC_FIFOLevelReg 0x0A
#define MFRC_WaterLevelReg 0x0B
#define MFRC_ControlReg 0x0C
#define MFRC_BitFramingReg 0x0D
#define MFRC_CollReg 0x0E
#define MFRC_RFU0F 0x0F
//PAGE1
#define MFRC_RFU10 0x10
#define MFRC_ModeReg 0x11
#define MFRC_TxModeReg 0x12
#define MFRC_RxModeReg 0x13
#define MFRC_TxControlReg 0x14
#define MFRC_TxAutoReg 0x15 //中文手册有误
#define MFRC_TxSelReg 0x16
#define MFRC_RxSelReg 0x17
#define MFRC_RxThresholdReg 0x18
#define MFRC_DemodReg 0x19
#define MFRC_RFU1A 0x1A
#define MFRC_RFU1B 0x1B
#define MFRC_MifareReg 0x1C
#define MFRC_RFU1D 0x1D
#define MFRC_RFU1E 0x1E
#define MFRC_SerialSpeedReg 0x1F
//PAGE2
#define MFRC_RFU20 0x20
#define MFRC_CRCResultRegM 0x21
#define MFRC_CRCResultRegL 0x22
#define MFRC_RFU23 0x23
#define MFRC_ModWidthReg 0x24
#define MFRC_RFU25 0x25
#define MFRC_RFCfgReg 0x26
#define MFRC_GsNReg 0x27
#define MFRC_CWGsCfgReg 0x28
#define MFRC_ModGsCfgReg 0x29
#define MFRC_TModeReg 0x2A
#define MFRC_TPrescalerReg 0x2B
#define MFRC_TReloadRegH 0x2C
#define MFRC_TReloadRegL 0x2D
#define MFRC_TCounterValueRegH 0x2E
#define MFRC_TCounterValueRegL 0x2F
//PAGE3
#define MFRC_RFU30 0x30
#define MFRC_TestSel1Reg 0x31
#define MFRC_TestSel2Reg 0x32
#define MFRC_TestPinEnReg 0x33
#define MFRC_TestPinValueReg 0x34
#define MFRC_TestBusReg 0x35
#define MFRC_AutoTestReg 0x36
#define MFRC_VersionReg 0x37
#define MFRC_AnalogTestReg 0x38
#define MFRC_TestDAC1Reg 0x39
#define MFRC_TestDAC2Reg 0x3A
#define MFRC_TestADCReg 0x3B
#define MFRC_RFU3C 0x3C
#define MFRC_RFU3D 0x3D
#define MFRC_RFU3E 0x3E
#define MFRC_RFU3F 0x3F
/*MFRC522的FIFO长度定义*/
#define MFRC_FIFO_LENGTH 64
/*MFRC522传输的帧长定义*/
#define MFRC_MAXRLEN 18
/*MFRC522命令集,中文手册P59*/
#define MFRC_IDLE 0x00 //取消当前命令的执行
#define MFRC_CALCCRC 0x03 //激活CRC计算
#define MFRC_TRANSMIT 0x04 //发送FIFO缓冲区内容
#define MFRC_NOCMDCHANGE 0x07 //无命令改变
#define MFRC_RECEIVE 0x08 //激活接收器接收数据
#define MFRC_TRANSCEIVE 0x0C //发送并接收数据
#define MFRC_AUTHENT 0x0E //执行Mifare认证(验证密钥)
#define MFRC_RESETPHASE 0x0F //复位MFRC522
/*MFRC522通讯时返回的错误代码*/
#define MFRC_OK (char)0
#define MFRC_NOTAGERR (char)(-1)
#define MFRC_ERR (char)(-2)
/*MFRC522函数声明*/
void MFRC_Init(void);
void MFRC_WriteReg(uint8_t addr, uint8_t data);
uint8_t MFRC_ReadReg(uint8_t addr);
void MFRC_SetBitMask(uint8_t addr, uint8_t mask);
void MFRC_ClrBitMask(uint8_t addr, uint8_t mask);
void MFRC_CalulateCRC(uint8_t *pInData, uint8_t len, uint8_t *pOutData);
char MFRC_CmdFrame(uint8_t cmd, uint8_t *pInData, uint8_t InLenByte, uint8_t *pOutData, uint16_t *pOutLenBit);
/***********************************************************************************
* MFRC552与MF1卡通讯接口程序 *
************************************************************************************/
/*Mifare1卡片命令字*/
#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态的卡
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //防冲撞
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //减值(扣除)
#define PICC_INCREMENT 0xC1 //增值(充值)
#define PICC_TRANSFER 0xB0 //转存(传送)
#define PICC_RESTORE 0xC2 //恢复(重储)
#define PICC_HALT 0x50 //休眠
/*PCD通讯时返回的错误代码*/
#define PCD_OK (char)0 //成功
#define PCD_NOTAGERR (char)(-1) //无卡
#define PCD_ERR (char)(-2) //出错
/*PCD函数声明*/
void PCD_Init(void);
void PCD_Reset(void);
void PCD_AntennaOn(void);
void PCD_AntennaOff(void);
char PCD_Request(uint8_t RequestMode, uint8_t *pCardType); //寻卡,并返回卡的类型
char PCD_Anticoll(uint8_t *pSnr); //防冲突,返回卡号
char PCD_Select(uint8_t *pSnr); //选卡
char PCD_AuthState(uint8_t AuthMode, uint8_t BlockAddr, uint8_t *pKey, uint8_t *pSnr); //验证密码(密码A和密码B)
char PCD_WriteBlock(uint8_t BlockAddr, uint8_t *pData); //写数据
char PCD_ReadBlock(uint8_t BlockAddr, uint8_t *pData); //读数据
char PCD_Value(uint8_t mode, uint8_t BlockAddr, uint8_t *pValue);
char PCD_BakValue(uint8_t sourceBlockAddr, uint8_t goalBlockAddr);
char PCD_Halt(void);
void Cardcompare(void); //自行定义函数
#endif
2、rc522.c
#include "stm32f1xx_hal.h"
#include "./BSP/RC522/rc522.h"
#include "stdio.h"
#include "./SYSTEM/usart/usart.h"
#include <string.h>
extern SPI_HandleTypeDef hspi2;
/**************************************************************************************
* 函数名称:MFRC_Init
* 功能描述:MFRC初始化
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:MFRC的SPI接口速率为0~10Mbps
***************************************************************************************/
void MFRC_Init(void)
{
RS522_NSS(1);
RS522_RST(1);
}
/**************************************************************************************
* 函数名称: SPI_RW_Byte
* 功能描述: 模拟SPI读写一个字节
* 入口参数: -byte:要发送的数据
* 出口参数: -byte:接收到的数据
***************************************************************************************/
static uint8_t ret; //这些函数是HAL与标准库不同的地方【读写函数】
uint8_t SPI2_RW_Byte(uint8_t byte)
{
HAL_SPI_TransmitReceive(&hspi2, &byte, &ret, 1, 10);//把byte 写入,并读出一个值,把它存入ret
return ret;//入口是byte 的地址,读取时用的也是ret地址,一次只写入一个值10
}
/**************************************************************************************
* 函数名称:MFRC_WriteReg
* 功能描述:写一个寄存器
* 入口参数:-addr:待写的寄存器地址
* -data:待写的寄存器数据
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void MFRC_WriteReg(uint8_t addr, uint8_t data)
{
uint8_t AddrByte;
AddrByte = (addr << 1 ) & 0x7E; //求出地址字节
RS522_NSS(0); //NSS拉低
SPI2_RW_Byte(AddrByte); //写地址字节
SPI2_RW_Byte(data); //写数据
RS522_NSS(1); //NSS拉高
}
/**************************************************************************************
* 函数名称:MFRC_ReadReg
* 功能描述:读一个寄存器
* 入口参数:-addr:待读的寄存器地址
* 出口参数:无
* 返 回 值:-data:读到寄存器的数据
* 说 明:无
***************************************************************************************/
uint8_t MFRC_ReadReg(uint8_t addr)
{
uint8_t AddrByte, data;
AddrByte = ((addr << 1 ) & 0x7E ) | 0x80; //求出地址字节
RS522_NSS(0); //NSS拉低
SPI2_RW_Byte(AddrByte); //写地址字节
data = SPI2_RW_Byte(0x00); //读数据
RS522_NSS(1); //NSS拉高
return data;
}
/**************************************************************************************
* 函数名称:MFRC_SetBitMask
* 功能描述:设置寄存器的位
* 入口参数:-addr:待设置的寄存器地址
* -mask:待设置寄存器的位(可同时设置多个bit)
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void MFRC_SetBitMask(uint8_t addr, uint8_t mask)
{
uint8_t temp;
temp = MFRC_ReadReg(addr); //先读回寄存器的值
MFRC_WriteReg(addr, temp | mask); //处理过的数据再写入寄存器
}
/**************************************************************************************
* 函数名称:MFRC_ClrBitMask
* 功能描述:清除寄存器的位
* 入口参数:-addr:待清除的寄存器地址
* -mask:待清除寄存器的位(可同时清除多个bit)
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void MFRC_ClrBitMask(uint8_t addr, uint8_t mask)
{
uint8_t temp;
temp = MFRC_ReadReg(addr); //先读回寄存器的值
MFRC_WriteReg(addr, temp & ~mask); //处理过的数据再写入寄存器
}
/**************************************************************************************
* 函数名称:MFRC_CalulateCRC
* 功能描述:用MFRC计算CRC结果
* 入口参数:-pInData:带进行CRC计算的数据
* -len:带进行CRC计算的数据长度
* -pOutData:CRC计算结果
* 出口参数:-pOutData:CRC计算结果
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void MFRC_CalulateCRC(uint8_t *pInData, uint8_t len, uint8_t *pOutData)
{
//0xc1 1 2 pInData[2]
uint8_t temp;
uint32_t i;
MFRC_ClrBitMask(MFRC_DivIrqReg, 0x04); //使能CRC中断
MFRC_WriteReg(MFRC_CommandReg, MFRC_IDLE); //取消当前命令的执行
MFRC_SetBitMask(MFRC_FIFOLevelReg, 0x80); //清除FIFO及其标志位
for(i = 0; i < len; i++) //将待CRC计算的数据写入FIFO
{
MFRC_WriteReg(MFRC_FIFODataReg, *(pInData + i));
}
MFRC_WriteReg(MFRC_CommandReg, MFRC_CALCCRC); //执行CRC计算
i = 100000;
do
{
temp = MFRC_ReadReg(MFRC_DivIrqReg); //读取DivIrqReg寄存器的值
i--;
}
while((i != 0) && !(temp & 0x04)); //等待CRC计算完成
pOutData[0] = MFRC_ReadReg(MFRC_CRCResultRegL); //读取CRC计算结果
pOutData[1] = MFRC_ReadReg(MFRC_CRCResultRegM);
}
/**************************************************************************************
* 函数名称:MFRC_CmdFrame
* 功能描述:MFRC522和ISO14443A卡通讯的命令帧函数
* 入口参数:-cmd:MFRC522命令字
* -pIndata:MFRC522发送给MF1卡的数据的缓冲区首地址
* -InLenByte:发送数据的字节长度
* -pOutdata:用于接收MF1卡片返回数据的缓冲区首地址
* -pOutLenBit:MF1卡返回数据的位长度
* 出口参数:-pOutdata:用于接收MF1卡片返回数据的缓冲区首地址
* -pOutLenBit:用于MF1卡返回数据位长度的首地址
* 返 回 值:-status:错误代码(MFRC_OK、MFRC_NOTAGERR、MFRC_ERR)
* 说 明:无
***************************************************************************************/
char MFRC_CmdFrame(uint8_t cmd, uint8_t *pInData, uint8_t InLenByte, uint8_t *pOutData, uint16_t *pOutLenBit)
{
uint8_t lastBits;
uint8_t n;
uint32_t i;
char status = MFRC_ERR;
uint8_t irqEn = 0x00;
uint8_t waitFor = 0x00;
/*根据命令设置标志位*/
switch(cmd)
{
case MFRC_AUTHENT: //Mifare认证
irqEn = 0x12;
waitFor = 0x10; //idleIRq中断标志
break;
case MFRC_TRANSCEIVE: //发送并接收数据
irqEn = 0x77;
waitFor = 0x30; //RxIRq和idleIRq中断标志
break;
}
/*发送命令帧前准备*/
MFRC_WriteReg(MFRC_ComIEnReg, irqEn | 0x80); //开中断
MFRC_ClrBitMask(MFRC_ComIrqReg, 0x80); //清除中断标志位SET1
MFRC_WriteReg(MFRC_CommandReg, MFRC_IDLE); //取消当前命令的执行
MFRC_SetBitMask(MFRC_FIFOLevelReg, 0x80); //清除FIFO缓冲区及其标志位
/*发送命令帧*/
for(i = 0; i < InLenByte; i++) //写入命令参数
{
MFRC_WriteReg(MFRC_FIFODataReg, pInData[i]);
}
MFRC_WriteReg(MFRC_CommandReg, cmd); //执行命令
if(cmd == MFRC_TRANSCEIVE)
{
MFRC_SetBitMask(MFRC_BitFramingReg, 0x80); //启动发送
}
i = 300000; //根据时钟频率调整,操作M1卡最大等待时间25ms
do
{
n = MFRC_ReadReg(MFRC_ComIrqReg);
i--;
}
while((i != 0) && !(n & 0x01) && !(n & waitFor)); //等待命令完成
MFRC_ClrBitMask(MFRC_BitFramingReg, 0x80); //停止发送
/*处理接收的数据*/
if(i != 0)
{
if(!(MFRC_ReadReg(MFRC_ErrorReg) & 0x1B))
{
status = MFRC_OK;
if(n & irqEn & 0x01)
{
status = MFRC_NOTAGERR;
}
if(cmd == MFRC_TRANSCEIVE)
{
n = MFRC_ReadReg(MFRC_FIFOLevelReg);
lastBits = MFRC_ReadReg(MFRC_ControlReg) & 0x07;
if (lastBits)
{
*pOutLenBit = (n - 1) * 8 + lastBits;
}
else
{
*pOutLenBit = n * 8;
}
if(n == 0)
{
n = 1;
}
if(n > MFRC_MAXRLEN)
{
n = MFRC_MAXRLEN;
}
for(i = 0; i < n; i++)
{
pOutData[i] = MFRC_ReadReg(MFRC_FIFODataReg);
}
}
}
else
{
status = MFRC_ERR;
}
}
MFRC_SetBitMask(MFRC_ControlReg, 0x80); //停止定时器运行
MFRC_WriteReg(MFRC_CommandReg, MFRC_IDLE); //取消当前命令的执行
return status;
}
/**************************************************************************************
* 函数名称:PCD_Reset
* 功能描述:PCD复位
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void PCD_Reset(void)
{
/*硬复位*/
RS522_RST(1);//用到复位引脚
osDelay(2);
RS522_RST(0);
osDelay(2);
RS522_RST(1);
osDelay(2);
/*软复位*/
MFRC_WriteReg(MFRC_CommandReg, MFRC_RESETPHASE);
osDelay(2);
/*复位后的初始化配置*/
MFRC_WriteReg(MFRC_ModeReg, 0x3D); //CRC初始值0x6363
MFRC_WriteReg(MFRC_TReloadRegL, 30); //定时器重装值
MFRC_WriteReg(MFRC_TReloadRegH, 0);
MFRC_WriteReg(MFRC_TModeReg, 0x8D); //定时器设置
MFRC_WriteReg(MFRC_TPrescalerReg, 0x3E); //定时器预分频值
MFRC_WriteReg(MFRC_TxAutoReg, 0x40); //100%ASK
PCD_AntennaOff(); //关天线
osDelay(2);
PCD_AntennaOn(); //开天线
printf("初始化完成\n");
}
/**************************************************************************************
* 函数名称:PCD_AntennaOn
* 功能描述:开启天线,使能PCD发送能量载波信号
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:每次开启或关闭天线之间应至少有1ms的间隔
***************************************************************************************/
void PCD_AntennaOn(void)
{
uint8_t temp;
temp = MFRC_ReadReg(MFRC_TxControlReg);
if (!(temp & 0x03))
{
MFRC_SetBitMask(MFRC_TxControlReg, 0x03);
}
}
/**************************************************************************************
* 函数名称:PCD_AntennaOff
* 功能描述:关闭天线,失能PCD发送能量载波信号
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:每次开启或关闭天线之间应至少有1ms的间隔
***************************************************************************************/
void PCD_AntennaOff(void)
{
MFRC_ClrBitMask(MFRC_TxControlReg, 0x03);
}
/***************************************************************************************
* 函数名称:PCD_Init
* 功能描述:读写器初始化
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void PCD_Init(void)
{
MFRC_Init(); //MFRC管脚配置
PCD_Reset(); //PCD复位 并初始化配置
PCD_AntennaOff(); //关闭天线
PCD_AntennaOn(); //开启天线
}
/***************************************************************************************
* 函数名称:PCD_Request
* 功能描述:寻卡
* 入口参数: -RequestMode:讯卡方式
* PICC_REQIDL:寻天线区内未进入休眠状态
* PICC_REQALL:寻天线区内全部卡
* -pCardType:用于保存卡片类型
* 出口参数:-pCardType:卡片类型
* 0x4400:Mifare_UltraLight
* 0x0400:Mifare_One(S50)
* 0x0200:Mifare_One(S70)
* 0x0800:Mifare_Pro(X)
* 0x4403:Mifare_DESFire
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Request(uint8_t RequestMode, uint8_t *pCardType)
{
int status;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
MFRC_ClrBitMask(MFRC_Status2Reg, 0x08);//关内部温度传感器
MFRC_WriteReg(MFRC_BitFramingReg, 0x07); //存储模式,发送模式,是否启动发送等
MFRC_SetBitMask(MFRC_TxControlReg, 0x03);//配置调制信号13.56MHZ
CmdFrameBuf[0] = RequestMode;
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 1, CmdFrameBuf, &unLen);
if((status == PCD_OK) && (unLen == 0x10))
{
*pCardType = CmdFrameBuf[0];
*(pCardType + 1) = CmdFrameBuf[1];
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_Anticoll
* 功能描述:防冲突,获取卡号
* 入口参数:-pSnr:用于保存卡片序列号,4字节
* 出口参数:-pSnr:卡片序列号,4字节
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Anticoll(uint8_t *pSnr)
{
char status;
uint8_t i, snr_check = 0;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
MFRC_ClrBitMask(MFRC_Status2Reg, 0x08);
MFRC_WriteReg(MFRC_BitFramingReg, 0x00);
MFRC_ClrBitMask(MFRC_CollReg, 0x80);
CmdFrameBuf[0] = PICC_ANTICOLL1;
CmdFrameBuf[1] = 0x20;
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 2, CmdFrameBuf, &unLen);
if(status == PCD_OK)
{
for(i = 0; i < 4; i++)
{
*(pSnr + i) = CmdFrameBuf[i];
snr_check ^= CmdFrameBuf[i];
}
if(snr_check != CmdFrameBuf[i])
{
status = PCD_ERR;
}
}
MFRC_SetBitMask(MFRC_CollReg, 0x80);
return status;
}
/***************************************************************************************
* 函数名称:PCD_Select
* 功能描述:选卡
* 入口参数:-pSnr:卡片序列号,4字节
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Select(uint8_t *pSnr)
{
char status;
uint8_t i;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = PICC_ANTICOLL1;
CmdFrameBuf[1] = 0x70;
CmdFrameBuf[6] = 0;
for(i = 0; i < 4; i++)
{
CmdFrameBuf[i + 2] = *(pSnr + i);
CmdFrameBuf[6] ^= *(pSnr + i);
}
MFRC_CalulateCRC(CmdFrameBuf, 7, &CmdFrameBuf[7]);
MFRC_ClrBitMask(MFRC_Status2Reg, 0x08);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 9, CmdFrameBuf, &unLen);
if((status == PCD_OK) && (unLen == 0x18))
{
status = PCD_OK;
}
else
{
status = PCD_ERR;
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_AuthState
* 功能描述:验证卡片密码
* 入口参数:-AuthMode:验证模式
* PICC_AUTHENT1A:验证A密码
* PICC_AUTHENT1B:验证B密码
* -BlockAddr:块地址(0~63)
* -pKey:密码
* -pSnr:卡片序列号,4字节
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:验证密码时,以扇区为单位,BlockAddr参数可以是同一个扇区的任意块
***************************************************************************************/
char PCD_AuthState(uint8_t AuthMode, uint8_t BlockAddr, uint8_t *pKey, uint8_t *pSnr)
{
char status;
uint16_t unLen;
uint8_t i, CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = AuthMode;
CmdFrameBuf[1] = BlockAddr;
for(i = 0; i < 6; i++)
{
CmdFrameBuf[i + 2] = *(pKey + i);
}
for(i = 0; i < 4; i++)
{
CmdFrameBuf[i + 8] = *(pSnr + i);
}
status = MFRC_CmdFrame(MFRC_AUTHENT, CmdFrameBuf, 12, CmdFrameBuf, &unLen);
if((status != PCD_OK) || (!(MFRC_ReadReg(MFRC_Status2Reg) & 0x08)))
{
status = PCD_ERR;
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_WriteBlock
* 功能描述:读MF1卡数据块
* 入口参数:-BlockAddr:块地址
* -pData: 用于保存待写入的数据,16字节
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_WriteBlock(uint8_t BlockAddr, uint8_t *pData)
{
char status;
uint16_t unLen;
uint8_t i, CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = PICC_WRITE;
CmdFrameBuf[1] = BlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
if(status == PCD_OK)
{
for(i = 0; i < 16; i++)
{
CmdFrameBuf[i] = *(pData + i);
}
MFRC_CalulateCRC(CmdFrameBuf, 16, &CmdFrameBuf[16]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 18, CmdFrameBuf, &unLen);
if((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_ReadBlock
* 功能描述:读MF1卡数据块
* 入口参数:-BlockAddr:块地址
* -pData: 用于保存读出的数据,16字节
* 出口参数:-pData: 用于保存读出的数据,16字节
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_ReadBlock(uint8_t BlockAddr, uint8_t *pData)
{
char status;
uint16_t unLen;
uint8_t i, CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = PICC_READ;
CmdFrameBuf[1] = BlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if((status == PCD_OK) && (unLen == 0x90))
{
for(i = 0; i < 16; i++)
{
*(pData + i) = CmdFrameBuf[i];
}
}
else
{
status = PCD_ERR;
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_Value
* 功能描述:对MF1卡数据块增减值操作
* 入口参数:
* -BlockAddr:块地址
* -pValue:四字节增值的值,低位在前
* -mode:数值块操作模式
* PICC_INCREMENT:增值
* PICC_DECREMENT:减值
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Value(uint8_t mode, uint8_t BlockAddr, uint8_t *pValue)
{
//0XC1 1 Increment[4]={0x03, 0x01, 0x01, 0x01};
char status;
uint16_t unLen;
uint8_t i, CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = mode;
CmdFrameBuf[1] = BlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
if(status == PCD_OK)
{
for(i = 0; i < 16; i++)
{
CmdFrameBuf[i] = *(pValue + i);
}
MFRC_CalulateCRC(CmdFrameBuf, 4, &CmdFrameBuf[4]);
unLen = 0;
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 6, CmdFrameBuf, &unLen);
if(status != PCD_ERR)
{
status = PCD_OK;
}
}
if(status == PCD_OK)
{
CmdFrameBuf[0] = PICC_TRANSFER;
CmdFrameBuf[1] = BlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_BakValue
* 功能描述:备份钱包(块转存)
* 入口参数:-sourceBlockAddr:源块地址
* -goalBlockAddr :目标块地址
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:只能在同一个扇区内转存
***************************************************************************************/
char PCD_BakValue(uint8_t sourceBlockAddr, uint8_t goalBlockAddr)
{
char status;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = PICC_RESTORE;
CmdFrameBuf[1] = sourceBlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
if(status == PCD_OK)
{
CmdFrameBuf[0] = 0;
CmdFrameBuf[1] = 0;
CmdFrameBuf[2] = 0;
CmdFrameBuf[3] = 0;
MFRC_CalulateCRC(CmdFrameBuf, 4, &CmdFrameBuf[4]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 6, CmdFrameBuf, &unLen);
if(status != PCD_ERR)
{
status = PCD_OK;
}
}
if(status != PCD_OK)
{
return PCD_ERR;
}
CmdFrameBuf[0] = PICC_TRANSFER;
CmdFrameBuf[1] = goalBlockAddr;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
if((status != PCD_OK) || (unLen != 4) || ((CmdFrameBuf[0] & 0x0F) != 0x0A))
{
status = PCD_ERR;
}
return status;
}
/***************************************************************************************
* 函数名称:PCD_Halt
* 功能描述:命令卡片进入休眠状态
* 入口参数:无
* 出口参数:无
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Halt(void)
{
char status;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
CmdFrameBuf[0] = PICC_HALT;
CmdFrameBuf[1] = 0;
MFRC_CalulateCRC(CmdFrameBuf, 2, &CmdFrameBuf[2]);
status = MFRC_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 4, CmdFrameBuf, &unLen);
return status;
}
uint8_t readUid[5]; //卡号
uint8_t CT[3]; //卡类型
uint8_t DATA[16]; //存放数据
uint8_t KEY_A[6]= {0xff,0xff,0xff,0xff,0xff,0xff};
uint8_t KEY_B[6]= {0xff,0xff,0xff,0xff,0xff,0xff};
unsigned char buf[16]={0x01,0x02,0x03,0x04,0x05,0x06,0xff
,0x07,0x80,0x69,0x18,0x17,0x16,0x15,0x14,0x13};
uint8_t status;
uint8_t addr = 0x01*4 + 0x03; // 总共16个扇区。一个扇区4个块,从0开始算,表示第一扇区第三块
void Cardcompare(void)
{
uint8_t i;
//status = PCD_WriteBlock(addr, buf);
status = PCD_Request(0x52, CT); //找到卡返回0
if(!status) //寻卡成功
{
status = PCD_ERR;
status = PCD_Anticoll(readUid); //防冲撞
}
if(!status) //防冲撞成功
{
status = PCD_ERR;
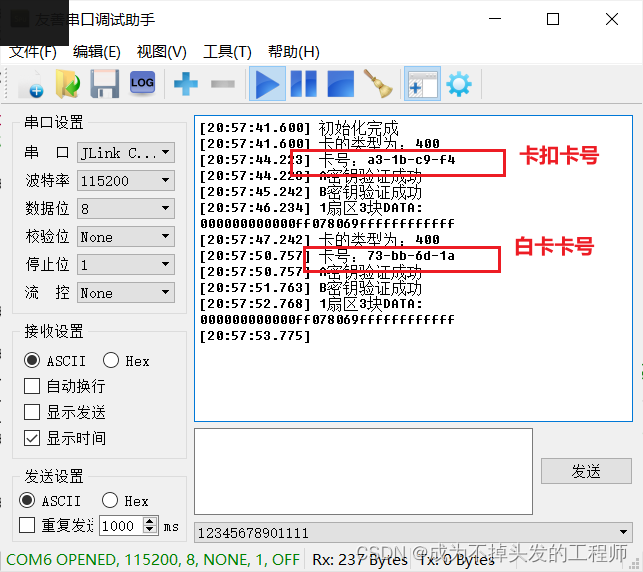
printf("卡的类型为:%x%x%x\r\n",CT[0],CT[1],CT[2]); /* 读取卡的类型 */
printf("卡号:%x-%x-%x-%x\r\n",readUid[0],readUid[1],readUid[2],readUid[3]);
HAL_Delay(1000);
status=PCD_Select(readUid); /* 选卡 */
}
if(!status) //选卡成功
{
status = PCD_ERR;
// 验证A密钥 块地址 密码 SN
status = PCD_AuthState(PICC_AUTHENT1A, addr, KEY_A, readUid);
if(status == PCD_OK)//验证A成功
{
printf("A密钥验证成功\r\n");
HAL_Delay(1000);
}
else
{
printf("A密钥验证失败\r\n");
HAL_Delay(1000);
}
// 验证B密钥 块地址 密码 SN
status = PCD_AuthState(PICC_AUTHENT1B, addr, KEY_B, readUid);
if(status == PCD_OK)//验证B成功
{
printf("B密钥验证成功\r\n");
}
else
{
printf("B密钥验证失败\r\n");
}
HAL_Delay(1000);
}
if(status == PCD_OK)//验证密码成功,接着读取3块
{
status = PCD_ERR;
status = PCD_ReadBlock(addr, DATA);
if(status == PCD_OK)//读卡成功
{
printf("1扇区3块DATA:");
for(i = 0; i < 16; i++)
{
printf("%02x", DATA[i]);
}
printf("\r\n");
}
else
{
printf("读卡失败\r\n");
}
HAL_Delay(1000);
}
}
常用函数,搞清楚下面这些函数会用即可,刚开始使用时,过于去抠原理,新手很难坚持下来。先从如何使用,实现每个小功能开始,有点成就感,才能学得更好,走得更远。兴趣才是最好的老师。如何通过这些基础函数来进行其他操作,对卡号进行识别、读写扇区存储信息、修改密码A/B等等,可通过另写一个函数实现,本文利用void Cardcompare(void);该函数进行实现。
char PCD_Request(uint8_t RequestMode, uint8_t *pCardType); //寻卡,并返回卡的类型
char PCD_Anticoll(uint8_t *pSnr); //防冲突,返回卡号
char PCD_Select(uint8_t *pSnr); //选卡
char PCD_AuthState(uint8_t AuthMode, uint8_t BlockAddr, uint8_t *pKey, uint8_t *pSnr); //验证密码(密码A和密码B)
char PCD_WriteBlock(uint8_t BlockAddr, uint8_t *pData); //写数据
char PCD_ReadBlock(uint8_t BlockAddr, uint8_t *pData); //读数据
3、spi.h
#ifndef __SPI_H
#define __SPI_H
#include "stm32f1xx_hal.h"
#ifdef __cplusplus
extern "C" {
#endif
extern SPI_HandleTypeDef hspi2;
void MX_SPI2_Init(void);
#ifdef __cplusplus
}
#endif
#endif4、spi.c
#include "./BSP/SPI/spi.h"
#include "main.h"
SPI_HandleTypeDef hspi2;
/* SPI2 init function */
void MX_SPI2_Init(void)
{
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_32;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi2) != HAL_OK)
{
Error_Handler();
}
}
void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(spiHandle->Instance==SPI2)
{
/* USER CODE BEGIN SPI2_MspInit 0 */
/* USER CODE END SPI2_MspInit 0 */
/* SPI2 clock enable */
__HAL_RCC_SPI2_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**SPI2 GPIO Configuration
PB13 ------> SPI2_SCK
PB14 ------> SPI2_MISO
PB15 ------> SPI2_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_15;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_14;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*
PB12为片选引脚(CS/NSS/SDA)
PB1为RST引脚
*/
/*Configure GPIO pins : PB12 PB4 */
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12|GPIO_PIN_1, GPIO_PIN_SET); /* 必须要拉高 */
}
}5、main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/KEY/key.h"
#include "./BSP/OLED/OLED.h"
#include "./BSP/SPI/spi.h"
#include "./BSP/RC522/rc522.h"
#include "main.h"
void SystemClock_Config(void);
int main(void)
{
SystemClock_Config(); /* 系统时钟初始化 */
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
usart_init(115200); /* 初始化串口 */
led_init(); /* led初始化 */
key_init(); /* 按键初始化 */
OLED_Init(); /* oled显示初始化 */
MX_SPI2_Init(); /* spi初始化 */
MFRC_Init(); /* MFRC522初始化 */
PCD_Reset(); /* MFRC522重置 */
while (1)
{
Cardcompare();
}
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
至于main.h主要是声明Error_Handler();函数,其他main.c中如系统时钟初始化等函数均是由cumax所自动生成。
有问题的朋友可以在下面留言交流,需要源码的关注并留言自己的邮箱即可获取~


















 1777
1777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











