






GPS时间系统与坐标系统
一:地心地固坐标系(ECEF坐标系)
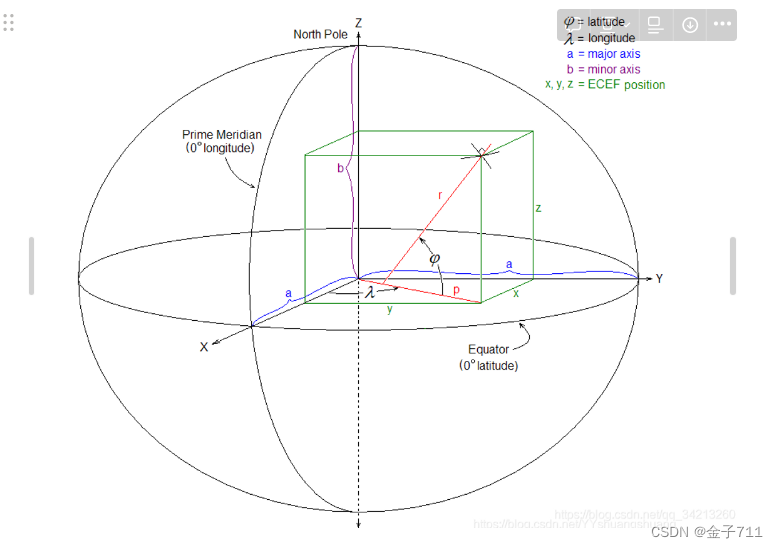
也叫地心地固直角坐标系。其原点为地球的质心,x轴延伸通过本初子午线(0度经度)和赤道(0deglatitude)的交点。 z轴延伸通过的北极(即,与地球旋转轴重合)。 y轴完成右手坐标系,穿过赤道和90度经度。
二:大地直角坐标系(LLA坐标系)
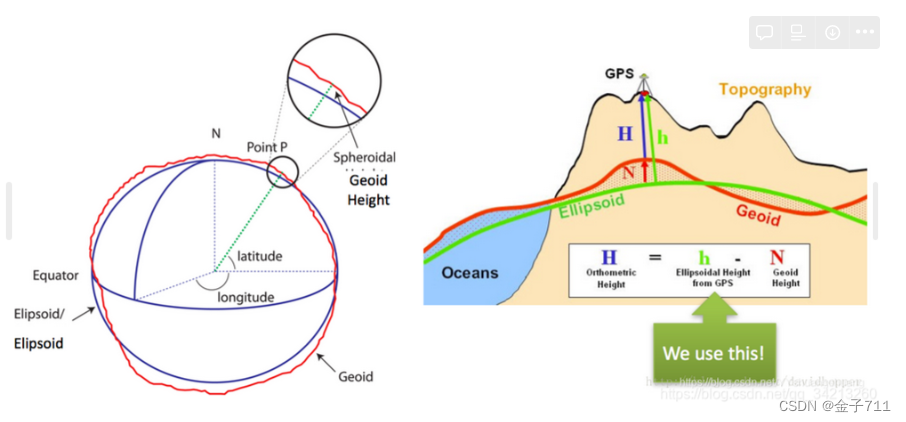
也就是也叫经纬高坐标系(经度(longitude),纬度(latitude)和高度(altitude)LLA坐标系)。,全球地理坐标系、大地坐标系。可以说是最为广泛应用的一个地球坐标系,它给出一点的大地纬度、大地经度和大地高程而更加直观地告诉我们该点在地球中的位置,故又被称作纬经高坐标系。WGS-84坐标系的X轴指向BIH(国际时间服务机构)1984.0定义的零子午面(Greenwich)和协议地球极(CTP)赤道的交点。Z轴指向CTP方向。Y轴与X、Z轴构成右手坐标系。
一句话解释就是:把前面提到的ECEF坐标系用在GPS中,就是WGS-84坐标系。
其中:
(1):大地纬度是过用户点P的基准椭球面法线与赤道面的夹角。纬度值在-90°到+90°之间。北半球为正,南半球为负。
(2):大地经度是过用户点P的子午面与本初子午线之间的夹角。经度值在-180°到+180°之间。
(3):大地高度h是过用户点P到基准椭球面的法线距离,基准椭球面以内为负,以外为正。
三:站心坐标系(ENU坐标系)
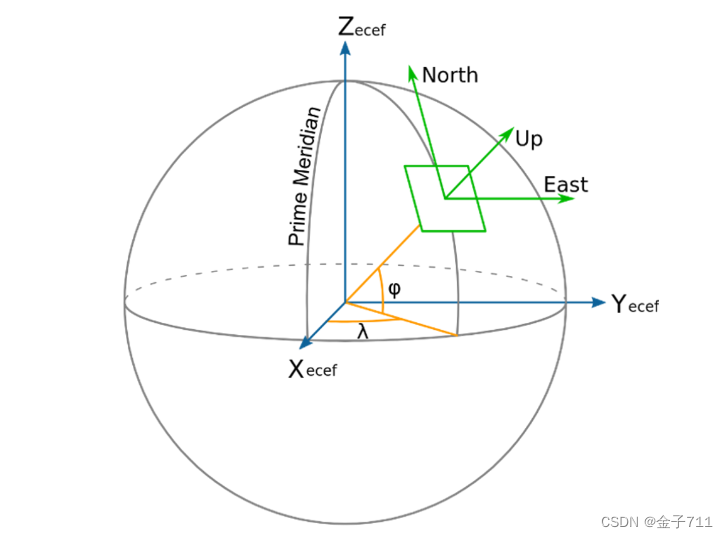
站心坐标系以用户所在位置P为坐标原点,坐标系定义为: X轴:指向东边 Y轴:指向北边 Z轴:指向天顶。站心坐标系的一个重要的应用是计算卫星在用户位置的观测向量和仰角(高度角)。
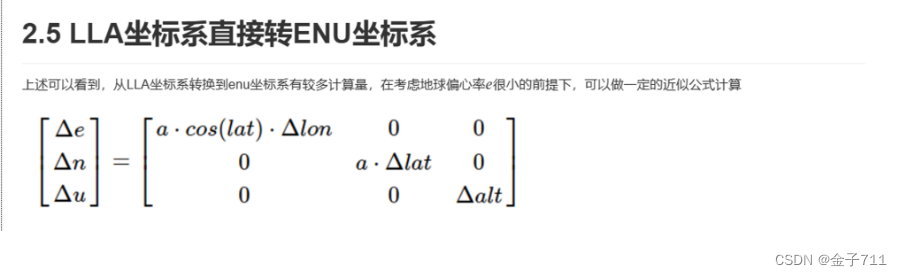
ENU局部坐标系采用三维直角坐标系来描述地球表面,实际应用较为困难,因此一般使用简化后的二维投影坐标系来描述。在众多二维投影坐标系中,统一横轴墨卡托(The Universal Transverse Mercator ,UTM)坐标系是一种应用较为广泛的一种。UTM 坐标系统使用基于网格的方法表示坐标,它将地球分为 60 个经度区,每个区包含6度的经度范围,每个区内的坐标均基于横轴墨卡托投影,如下图所示:

GPS卫星信号与卫星星历
GPS卫星信号
在进行单点定位的时候,需要的是伪随机噪声码(C/A码,P码)
C/A码与P码都叫做伪码。接收机通过对接收到的卫星信号进行与接收机内部复制的伪码进行相关运算,检测自相关函数的峰值,进而确定接收信号中伪码的相位并测量出从卫星到接收机的空间距离。
GPS卫星星历
GPS卫星位置计算(通过广播星历计算卫星的位置).
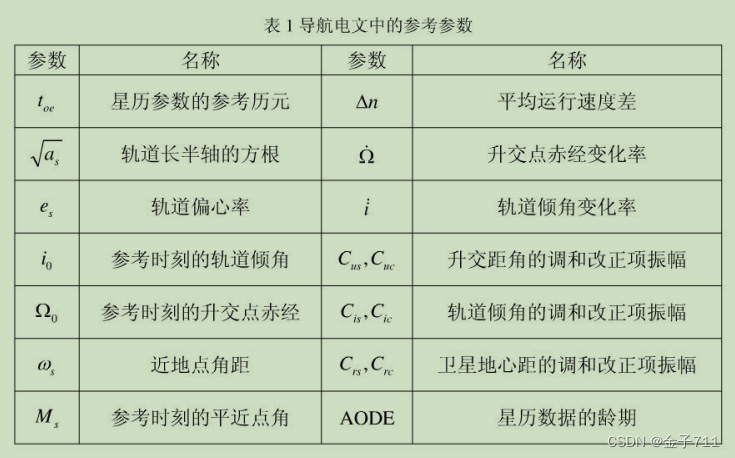
有关GPS卫星位置的计算可见DAY13,在这部分,主要是通过广播星历引入16个卫星参数,包括1个参考时刻,6个轨道参数和9个摄动改正参数。
星历误差对单点定位的影响
单点定位观测模型
![]()
需要经历泰勒展开式,得到线性组合方程
单点定位误差改正模型
在一个待定点上,利用GPS 接收机观测4颗以上的GPS卫星,独立确定待定点在地固坐标系的位置(目前为WGS-84坐标系),称之为绝对定位。它的优点是,只需用一-台接收机即可独立定位,观测的组织与实施简便,数据处理简单。其主要问题是,受卫星星历误差和卫星信号在传播过程中的大气延迟误差的影响显著,定位精度较低。
伪距定位的解算
1)组成观测误差方程
组成观测方程主要是伪距观测误差方程,这时候需要注意卫星点坐标,接收机坐标(但是只能够提供一个概略坐标,在公式中是真实地接收机坐标),卫星与接收机钟差、电离层延迟、对流层延迟还有观测随机误差。

p为伪距观测值(单位m),r为真实卫地距(单位m),c为光速(单位m/s),光速乘的那部分为接收机钟差及卫星钟差(单位s),I为电离层延迟(单位m),T为对流层延迟(单位m)
2)计算卫星S在t时刻下的坐标与钟差
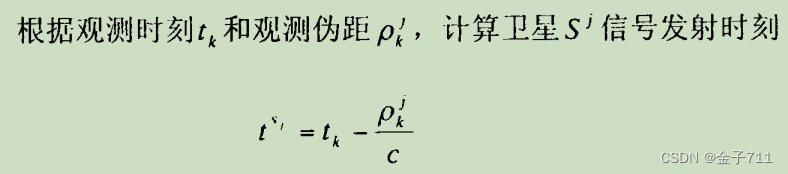
1.计算发射卫星发射的时刻
此时需要接收机接收机接收到的时刻减去传播的时间。
2.计算卫星的坐标以及钟差
在广播星历文件中,提供有相关的参数去计算卫星的位置以及钟差。
钟差的计算是通过以下步骤实现的:
-
首先,从广播星历文件中获取卫星的钟差参数。
-
其次,接收器接收到卫星信号后,测量卫星信号与接收机中的本地时钟之间的差异。
-
然后,使用卫星的钟差参数对测量值进行校正,以获得更准确的卫星时钟值。
①计算观测时刻的卫星钟差初值
计算观测时刻与参考时刻toc时间差,利用多项式拟合的方式,根据广播星历的af0、af1、af2算出观测时刻的卫星钟差。
②计算观测时刻经过相对论效应改正后卫星钟差(SQR)
此处考虑到卫星处于高速的运动状态会对卫星钟的准确度产生影响,使用相对论原理,对这项误差进行改正,输出卫星钟差的参数。
3)电离层改正计算-----Klobuchar模型
所谓电离层,是指地球上空距地面高度在50-400km之间的大气层。电离层中的气体分子由于受太阳等天体各种射线的辐射,产生强烈的电离,形成大量的自出电子和正离子。当 GPS 信号通过电离层时,如同其它电磁波一样,信号的路径会发生弯曲,传播速度也会发生变化。所以用信号的传播时间乘上真空中光速而得到的距离就不等于卫星至接收机的几何距离,这种偏差叫电离层折射误差。
对于单频 GPS接收机的用户,为了减弱电离层的影响,一般是采用导航电文所提供的电离层模型,或其它适应的电离层模型对观测量加以改正。但是这种模型至今仍在完善中。目前模型改正的有效性约为75%,也就是说,当电离层观测值的影响为20m时,修正后的残差仍可达 5m。模型改正方法分两种情况是直接采用导航电文所提供的电离层延迟改正Tgd。此值是卫星在天顶方向(即仰角E=90°)的电离层延迟改正,实际观测方向之改正数,尚需依T。和方向的仰角E计算。二是依据导航电文提供电离层延迟改正参数α0、a1、a2、α3和β0、β1、β2、β3按下述模型计算。
使用GINav的进行SPP的时候是提供广播星历所提供的电离层模型对观测量加以改正。
Klobuchar模型是一种用于计算电离层延迟改正的简化模型,它基于四个参数(α、β、γ、δ)来描述电离层延迟的变化。下面是Klobuchar模型中计算电离层延迟改正的公式:
首先,根据接收机的地理纬度、经度和海拔高度,计算接收机的地理坐标参数:
- φ:接收机的纬度(单位:弧度)
- λ:接收机的经度(单位:弧度)
- h:接收机的海拔高度(单位:米)
接下来,根据卫星的仰角(elevation angle)和方位角(azimuth angle)计算几何参数:
- θ:卫星的仰角(单位:弧度)
- ϕ:卫星的方位角(单位:弧度)
然后,通过以下公式计算电离层延迟改正值(Units: meters):
δI = α + β * (1 - (2θ/pi)) + γ * (1 - (2θ/pi))^3 + δ * (1- (2*θ/pi))^4
其中:
- α、β、γ、δ 是来自导航广播电文的Klobuchar系数。
- δI 是电离层延迟改正值,表示接收机上的电离层延迟。
最后,根据接收时间的时刻信息(单位:秒)和频率(单位:Hz),使用电离层延迟改正值计算电离层延迟时间改正值(Units: seconds):
ΔtI = C * δI / (f ^ 2)
其中,光速用C表示通常为 299,792,458 m/s,f为频率。
请注意,Klobuchar模型是一种简化的模型,它根据卫星方向角和经验参数来估计电离层延迟,但不考虑电离层的空间和时间变化。因此,对于较高精度的定位和导航应用,可能需要使用更复杂的模型或根据实时电离层观测数据计算电离层延迟改正
4)对流层改正计算-----Saastamoinen模型
对流层是高度为40km 以下的大气层,其大气密度比电离层更大,大气状态也更复杂,对流层与地面接触并从地面得到辐射热能,其温度随高度的上升而降低。对流层折射包括两部分:一是由于无线电波的传播速度或光速在大气中变慢造成路径延迟,这占主要部分,二是由于GPS信号通过对流层时,也使传播的路径发生弯曲,从而使测量距离产生偏差。
对流层折射与地面气候、大气压力、温度和湿度变化有密切关系;对流层折射的影响与信号的高度角有关。天顶方向的对流层延迟数约为2.3m,天顶距Z=80度时,对流层延迟将增加至约20m。对流层折射是GPS定位中影响较大的一项,目前有许多对流层改正模型。常用的有Hopfield模型、Saastamoinen模型和 Black模型。
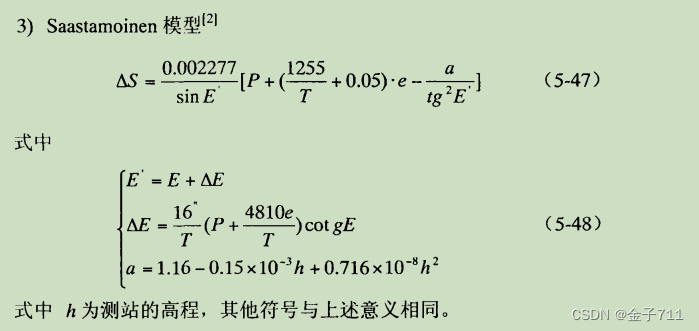
使用GINav进行对流层改正模型为Saastamoinen模型。
Saastamoinen模型是一种用于计算对流层延迟改正的模型,用于精确校正卫星信号在通过大气中传播时产生的延迟效应。下面是Saastamoinen模型中计算对流层延迟改正的公式:
首先,根据接收机的地理纬度、经度和海拔高度,计算接收机的地理坐标参数:
- φ:接收机的纬度(单位:弧度)
- h:接收机的海拔高度(单位:米)
接下来,根据卫星的仰角(elevation angle)和方位角(azimuth angle)计算几何参数:
- E:卫星的仰角(单位:弧度)
然后,根据以下公式计算对流层延迟改正值(Units: meters):
δtL = 0.002277 / sin(E) * (1.001 / sqrt(0.002001 + sin^2(φ + 0.00264)))
其中:
- δtL 是对流层延迟改正值,表示接收机上的对流层延迟。
- 0.002277 是对流层干延迟常数。
- 0.002001 是对流层湿延迟常数。
- 0.00264 是对流层延迟修正常数。
最后,将对流层延迟改正值应用于测量结果来校正卫星信号的传播时间和路径。
5)定位解算


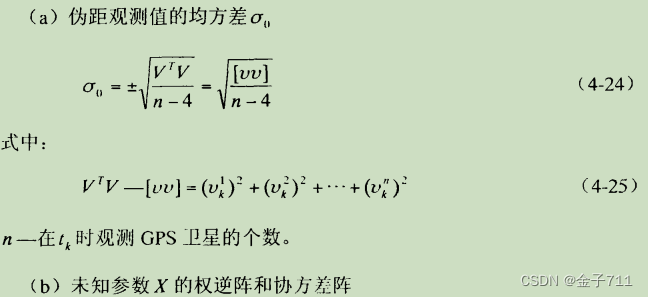
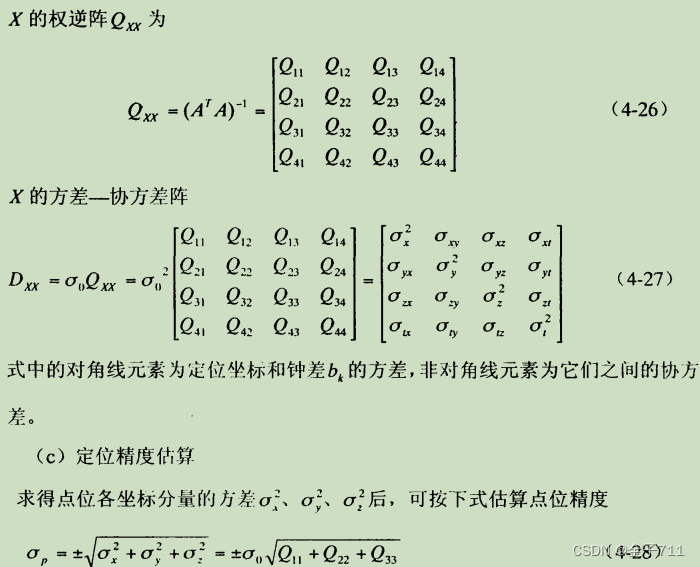
6)精度估计
根据最小二乘法的有关精度估算公式,估算定位的各项精度。
在单点定位中,使用最小二乘方法可以估计接收机的位置坐标。以下是最小二乘方法在单点定位中的基本公式:
假设有n个卫星提供的观测量,每个观测量包括:
- 卫星的位置 (x, y, z)。
- 从卫星到接收机的测量距离 (ρ) 或测量伪距 (Pseudorange)。
接收机的位置估计为 (X, Y, Z)。则对于每个观测量,可以利用以下公式计算残差 (ε):
ε = ρ - √((X-x)^2 + (Y-y)^2 + (Z-z)^2)
最小二乘方法的目标是最小化所有残差的平方和,即最小化以下的目标函数:
F = ∑(ε^2)
为了计算最小二乘解,需要对目标函数进行求导,并令导数等于零。然后,通过求解线性方程组或使用迭代算法,可以得到接收机的位置估计值 (X, Y, Z)。
需要注意的是,单点定位使用最小二乘方法得到的结果是接收机位置的估计值,通常需要考虑其他因素(如钟差校正、电离层延迟校正等)来进一步提高定位的准确性和精度。此外,还需要一定数量的卫星观测值才能进行有效的定位,通常至少需要4颗以上的卫星观测量。
DOP值
DOP(Dilution of Precision)值用于评估定位系统的几何精度,DOP是无量纲的数值,以下是常见的DOP参数的计算方法:
1.VDOP(Vertical Dilution of Precision)垂直定位精度因子
- 假设接收机的位置估计为 (X, Y, Z)。
- 对于每个使用的卫星 i,计算其对垂直定位的影响因子 VDOP_i:
- VDOP_i = sqrt((A_i^2) / (B_z^2))
- 其中,A_i 为卫星 i 形成的几何矩阵的对角元素(表示该卫星与接收机的几何关系),B_z 是 Z 方向上的几何矩阵元素。
- VDOP = sqrt(sum(VDOP_i^2))
2.HDOP(Horizontal Dilution of Precision)水平定位精度因子
- 假设接收机的位置估计为 (X, Y, Z)。
- 对于每个使用的卫星 i,计算其对水平定位的影响因子 HDOP_i:
- HDOP_i = sqrt((A_i^2) / (B_x^2 + B_y^2))
- 其中,A_i 为卫星 i 形成的几何矩阵的对角元素(表示该卫星与接收机的几何关系),B_x 和 B_y 分别为 X 和 Y 方向上的几何矩阵元素。
- HDOP = sqrt(sum(HDOP_i^2))
3.PDOP(Position Dilution of Precision)位置精度因子
- PDOP = sqrt(HDOP^2 + VDOP^2)
4.GDOP(Geometric Dilution of Precision)几何精度因子
- 假设接收机的位置估计为 (X, Y, Z)。
- 对于每个使用的卫星 i,计算其对定位误差的影响因子 GDOP_i:
- GDOP_i = sqrt((A_i^2) / (B_x^2 + B_y^2 + B_z^2))
- 其中,A_i 为卫星 i 形成的几何矩阵的对角元素,B_x、B_y 和 B_z 分别为 X、Y 和 Z 方向上的几何矩阵元素。
- GDOP = sqrt(sum(GDOP_i^2))
5.TDOP(Time Dilution of Precision)时间精度因子
- TDOP = sqrt(sum(A_i^2)),其中 A_i 为卫星 i 形成的几何矩阵的对角元素。
需要注意的是,以上计算方法是基于接收机的位置估计和使用的卫星的几何关系矩阵。各个DOP值越小,对应的定位精度越高。
在 DOP 参数的计算中,涉及到卫星和接收机的几何关系矩阵。这些几何关系通常是基于卫星 ECEF (Earth-Centered, Earth-Fixed) 坐标系和接收机的 ECEF 坐标系计算得到的。
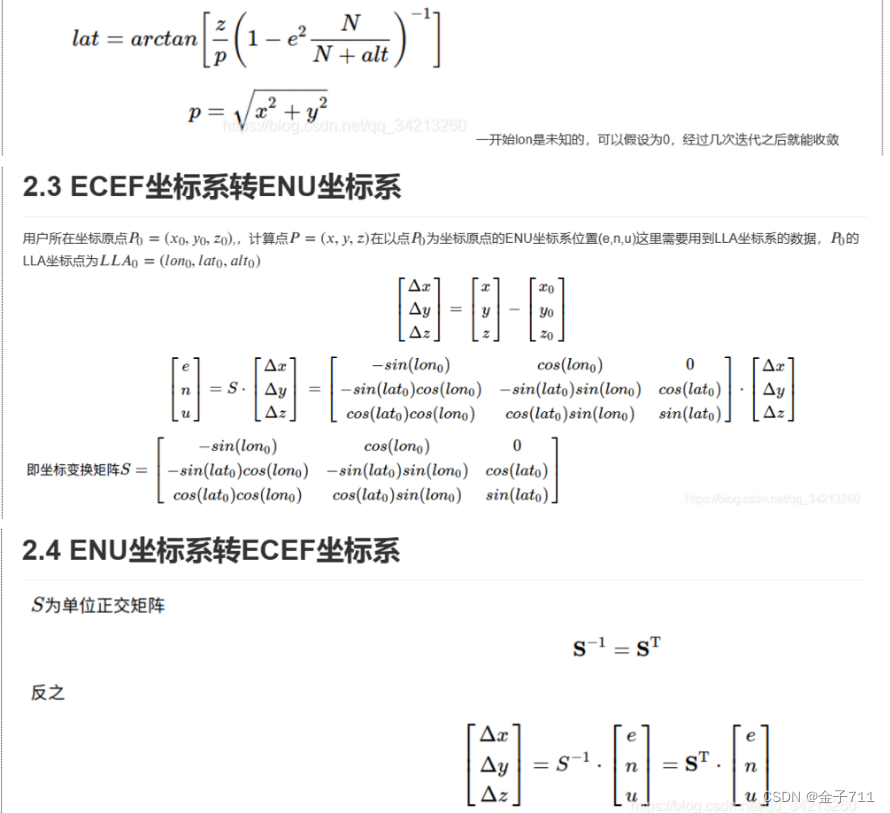
然而,通常定位的结果以及用户最关心的坐标是在本地地理坐标系下,比如 ENU (East-North-Up) 坐标系。ENU 坐标系是相对于参考点或接收机位置的局部坐标系。
所以为了将几何关系的精度因子与最终的定位结果联系起来,我们需要将坐标系进行转换,将精度因子从 ECEF 坐标系转换到 ENU 坐标系。这样,我们可以更直观地理解与定位精度相关的参数。
在进行坐标系转换时,我们需要知道参考点或接收机的位置以及相关坐标系之间的转换矩阵。通过进行坐标系转换,我们可以在 ENU 坐标系下获得相应的 DOP 值,这样可以更好地评估定位的几何精度和相应的坐标误差。
总而言之,将精度因子转换为 ENU 坐标系是为了与最终定位结果的坐标系保持一致,并能够更直观地理解定位精度的影响。















 248
248











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









