






参考链接:https://blog.csdn.net/MJy65535/article/details/130030063?spm=1001.2014.3001.5506
运行环境:win10+matlab2019
数据文件类型:
o文件和n文件和p文件区别
RINEX (Receiver Independent Exchange Format) 文件是一种标准的 GNSS (Global Navigation Satellite System) 数据格式,用于存储 GPS、GLONASS、Galileo 等卫星导航系统接收机的观测数据和导航数据。
在 RINEX 文件中,“o” 文件和 “n” 文件都是观测文件,但它们包含的数据类型和格式略有不同。
“o” 文件
包含接收机观测到的原始伪距和载波相位观测值,以及与观测相关的元数据,例如接收机和天线的标识、观测时间和卫星编号等。这些观测数据通常用于精密定位和导航应用。
“n” 文件
包含卫星导航系统的星历和时钟偏差数据,用于计算接收机观测值的绝对位置。这些数据通常由卫星导航系统广播,并通过卫星导航系统的控制中心定期更新。
总之,“o” 文件包含接收机观测数据,而 “n” 文件包含卫星导航系统的星历和时钟偏差数据,两者都是精密定位和导航应用所必需的数据。
对于一般的 GNSS 应用,接收机只需要观测数据文件(通常是 “o” 和 “n” 文件)就可以实现基本的位置解算和导航功能。只有当需要进行更高级的数据处理和精度控制时,才需要使用 P 文件进行数据处理和校正。
“P” 文件
包含了接收机在某个观测时段内的位置信息、钟差信息、接收机的天线相位中心以及其他一些额外的数据信息。这些数据通常用于精密定位和导航应用中的数据处理和校正。
DCB (Differential Code Bias) file
DCB (Differential Code Bias) 文件是一种 GNSS 数据文件,用于存储卫星导航系统中不同频段的码差信息。
GNSS 接收机测量卫星信号时,不同频段的信号传播速度可能会有微小的差异,这会导致不同频段的码距(pseudo-range)和码相(carrier-phase)之间存在固定的差异,称为差分码偏差(DCB)。差分码偏差对 GNSS 数据处理和精密定位应用有重要影响,需要进行精确的校正。
DCB 文件通常由 GNSS 数据处理中心生成,包含了不同卫星和频段之间的差分码偏差信息。DCB 文件的格式通常是文本格式,其中包含了卫星编号、频段编号以及相应的码差偏差值等信息。
在进行 GNSS 数据处理时,需要使用 DCB 文件进行数据校正,以消除不同频段之间的差分码偏差对测量结果的影响,提高精度和可靠性。
总之,DCB 文件是一种存储卫星导航系统中不同频段的码差信息的文件,用于进行 GNSS 数据处理中的数据校正,以提高精度和可靠性。
BSX(MGEX DCB) file
BSX 文件是一种包含多系统、多频段差分码偏差(DCB)信息的 GNSS 数据文件。它通常是由多个数据处理中心协作生成的,是针对 Multi-GNSS Experiment (MGEX) 项目而设计的。
MGEX 项目是一个国际性的 GNSS 实验计划,旨在推进多系统、多频段 GNSS 数据的开发和应用。BSX 文件是 MGEX 项目的一个重要组成部分,其中包含了全球范围内的多个卫星导航系统(如 GPS、GLONASS、Galileo、BeiDou 等)和多个频段之间的差分码偏差信息。
BSX 文件的格式是文本格式,其中包含了卫星编号、频段编号以及相应的差分码偏差值等信息。BSX 文件的命名方式通常为 “MGEXYYDDD.BSX”,其中 YY 表示年份,DDD 表示一年中的第几天。
在进行 GNSS 数据处理时,需要使用 BSX 文件进行数据校正,以消除不同卫星和频段之间的差分码偏差对测量结果的影响,提高精度和可靠性。
总之,BSX 文件是一种包含多系统、多频段差分码偏差(DCB)信息的 GNSS 数据文件,通常是由多个数据处理中心协作生成,用于进行 GNSS 数据处理中的数据校正,以提高精度和可靠性。
EOP file
EOP (Earth Orientation Parameters) 文件是一种存储地球自转参数的文件,包含了地球自转角速度、极移以及其他相关的地球自转参数信息。这些参数信息对于 GNSS 数据处理和精密定位应用有重要影响,需要进行精确的校正。
地球自转参数是描述地球自转状态的物理量,包括了地球自转角速度、极移、地球自转角度等。这些参数的变化会影响 GNSS 接收机接收卫星信号的频率和时间,从而影响到定位和导航精度。
EOP 文件通常由国际地球自转参考系统 (IERS) 提供,并按照一定的格式存储。EOP 文件中包含了地球自转参数的历史数据,通常以天为单位,每天的数据包含了一组地球自转参数信息。
一:SPP运行示例
(1)matlab上加载GINav-main文件夹

(2)修改SPP数据文件的路径
修改路径为安装路径:E:\AZB\GINave-study\GINav-main\data\data_cpt
修改如下所示,修改后保存
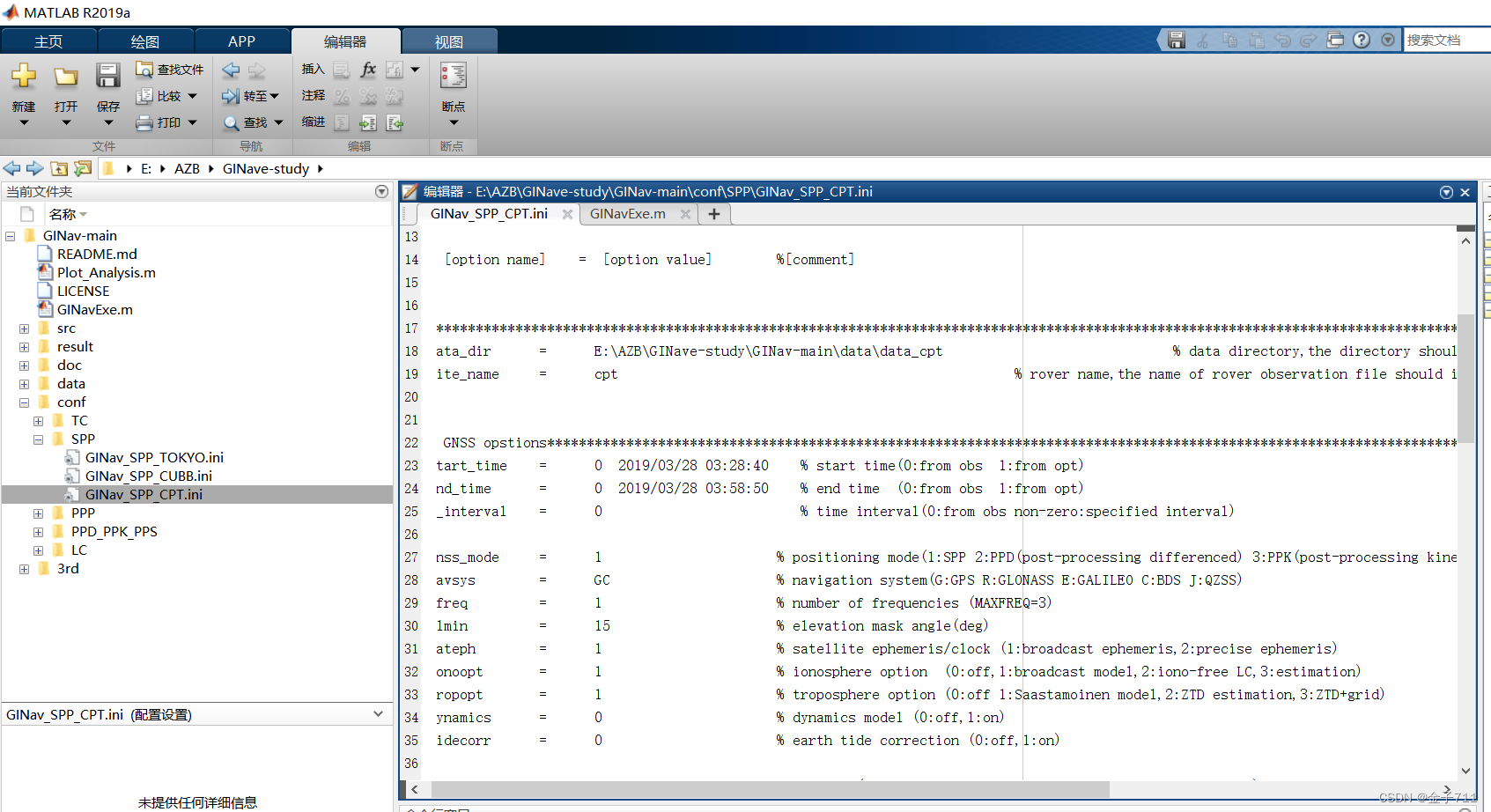
(3)修改SPP配置文件,运行
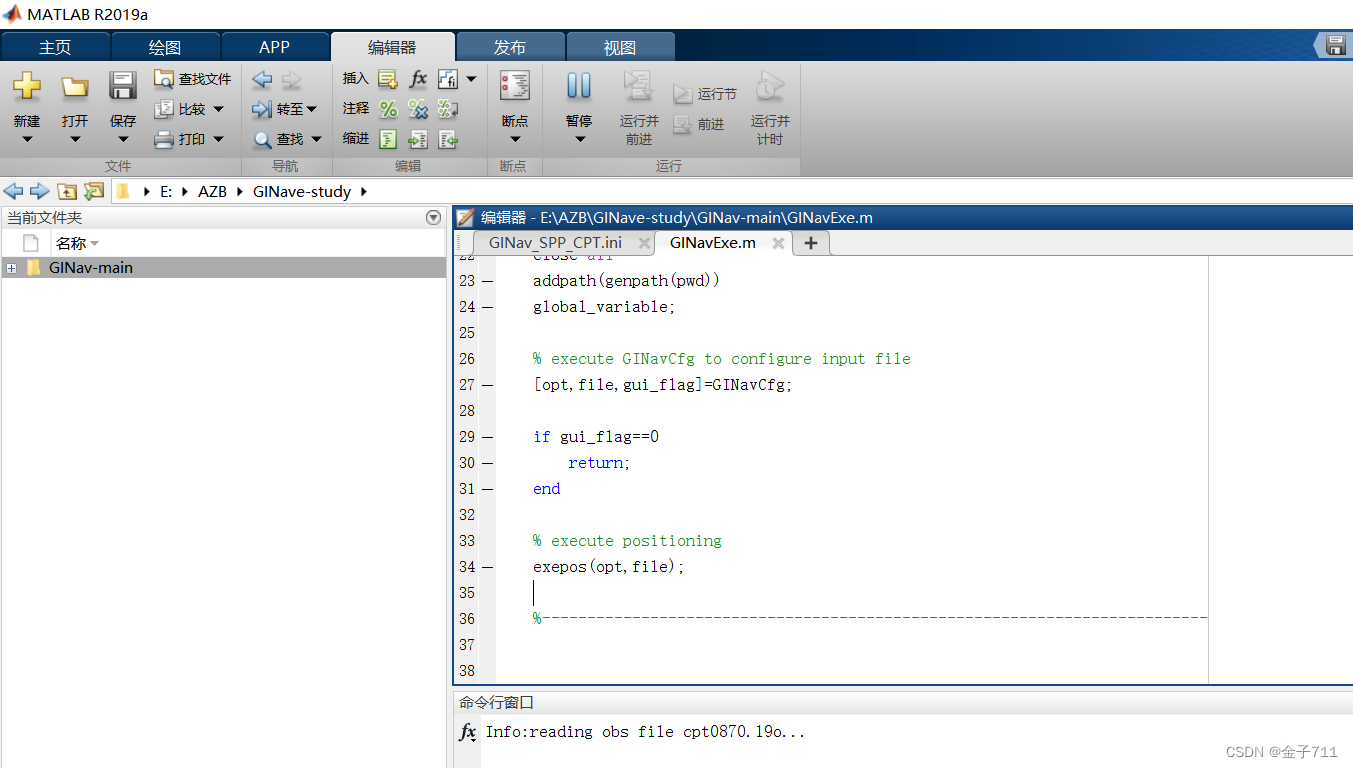
打开GINavExe.m,点击上端的运行,如下所示
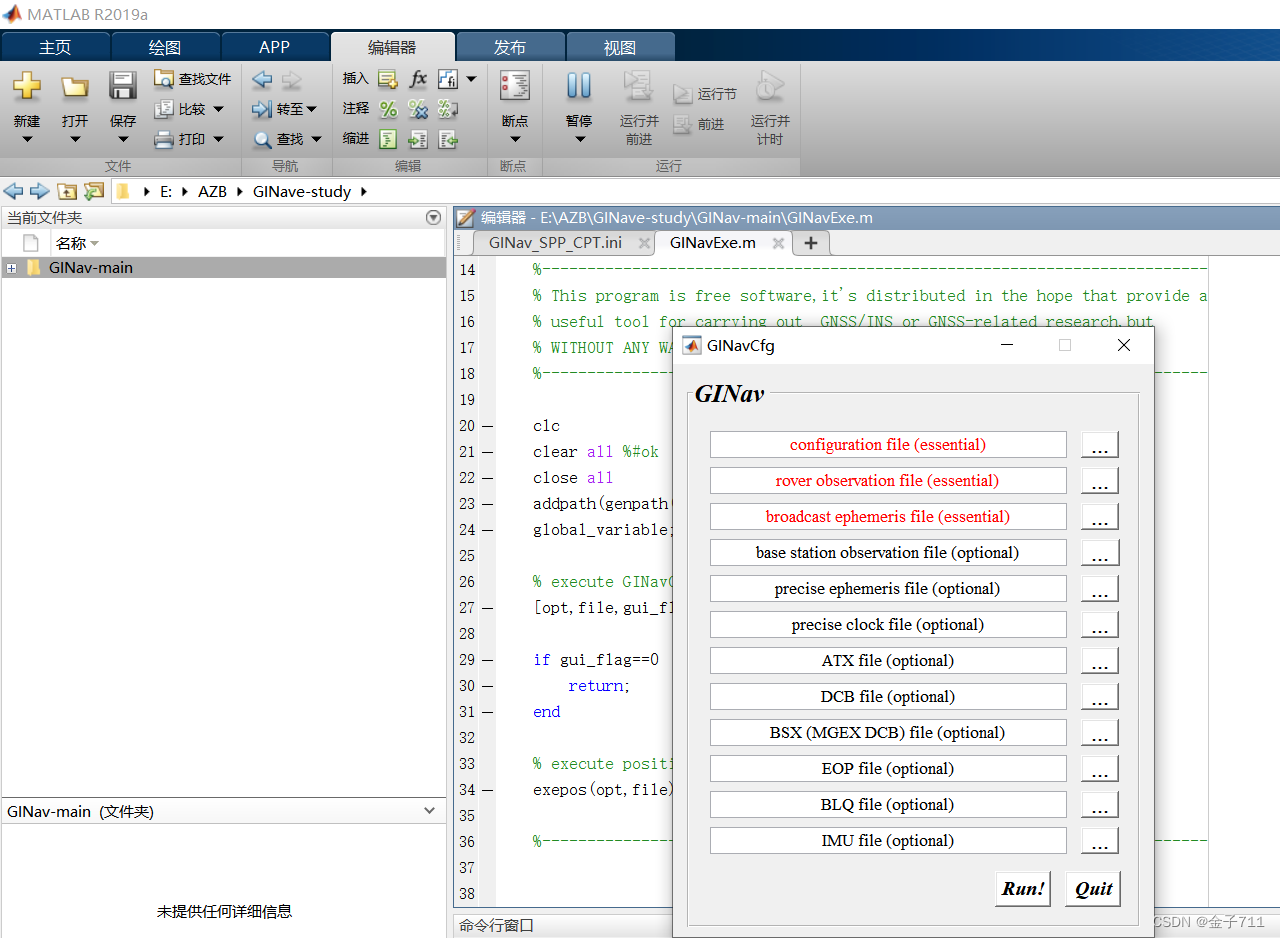
修改路径文件,点击configuration file(essential)后面的...,选择如下所示(为之前SPP更改数据路径的那个文件),如下所示
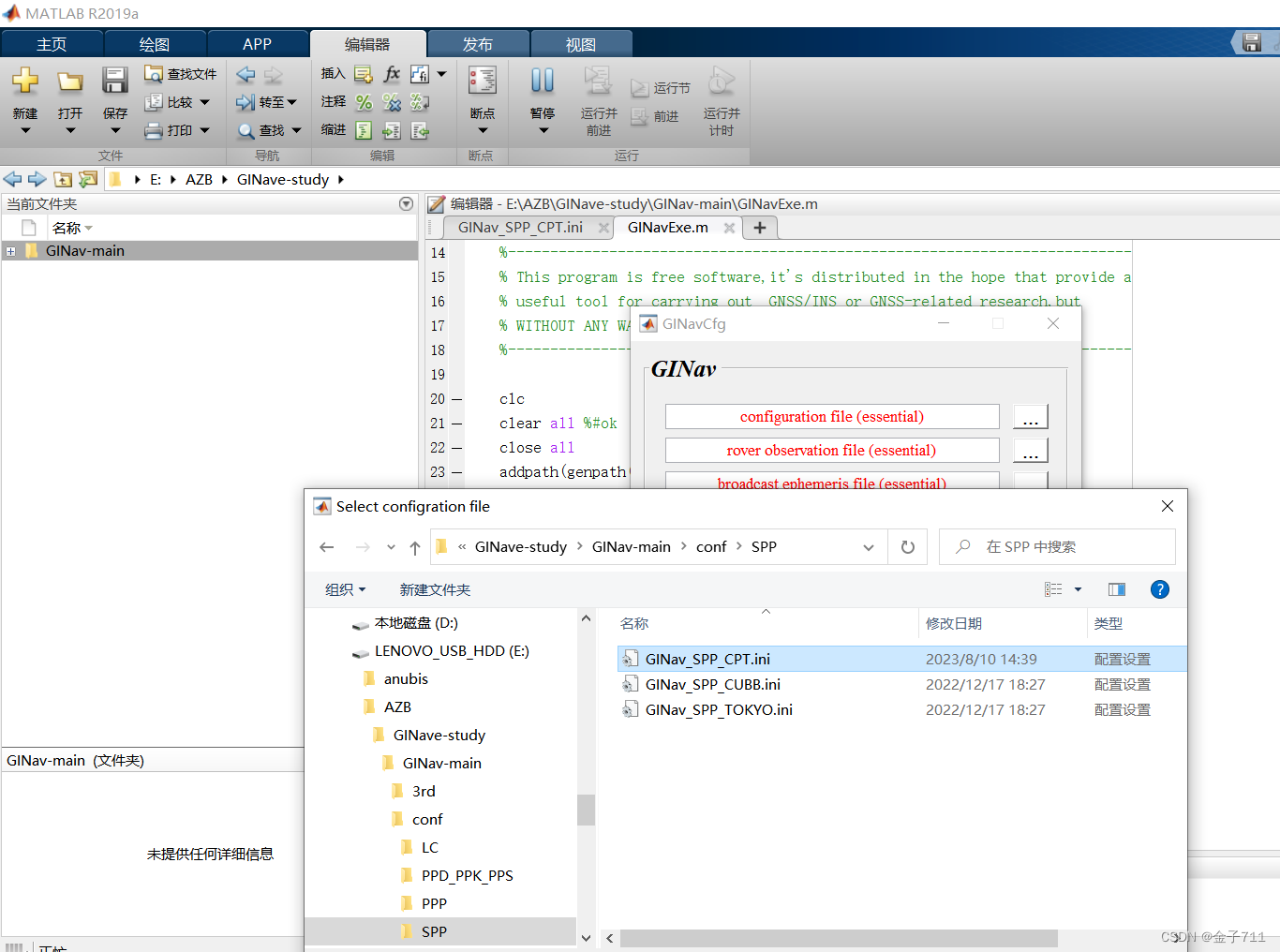
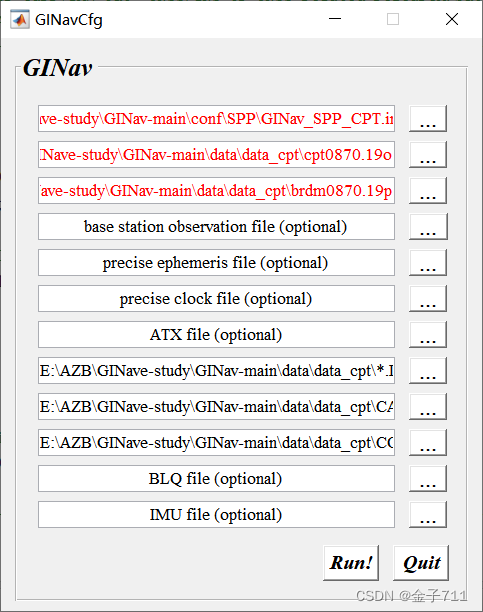
双击,出现下述界面。
点击Run!, 在这个过程中运行的非常的慢,刚开始如下。
运行一会后,出现了 下述的界面,开始SPP处理数据。
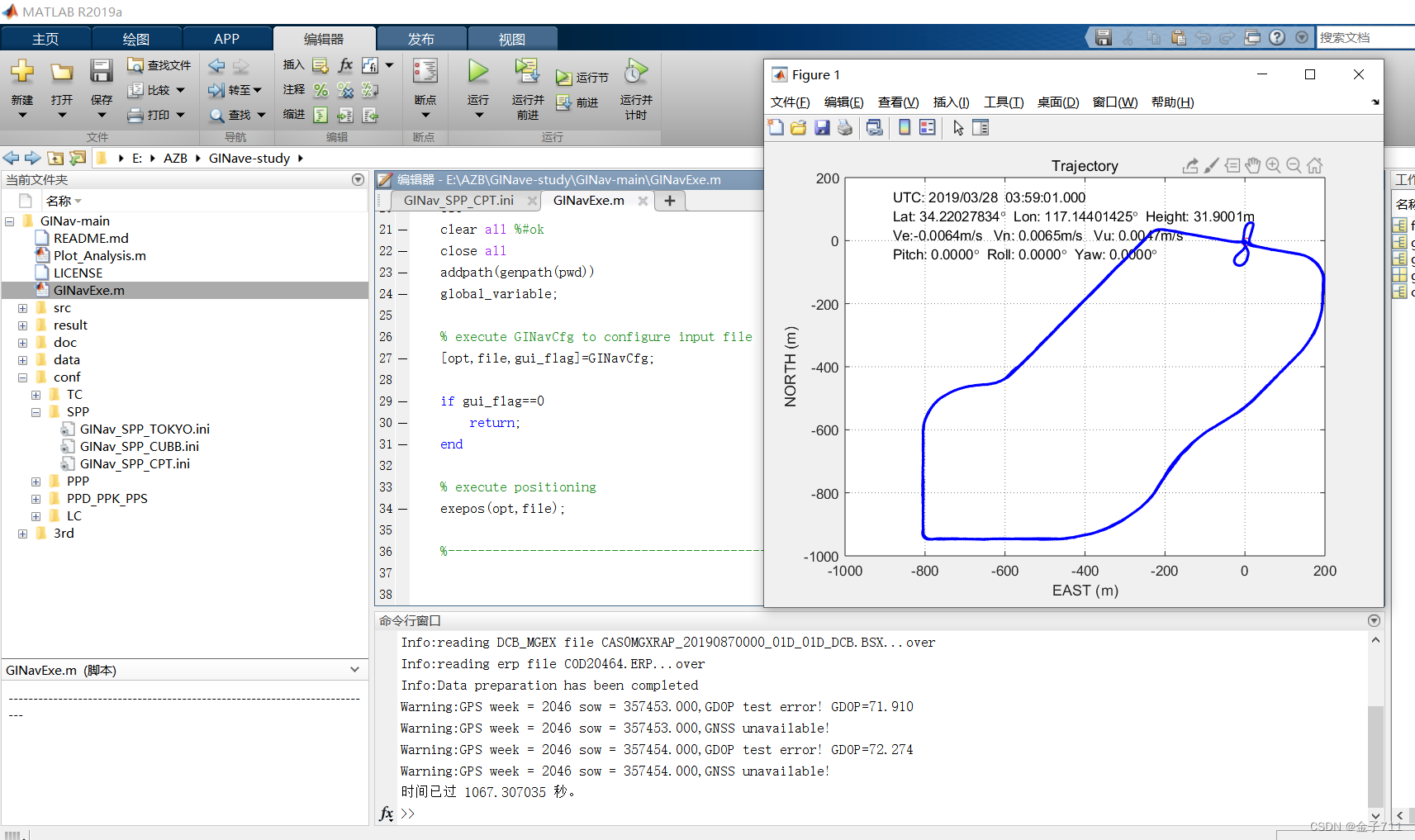
运行后,在命令行出现运行的结果,以及出现的图片。
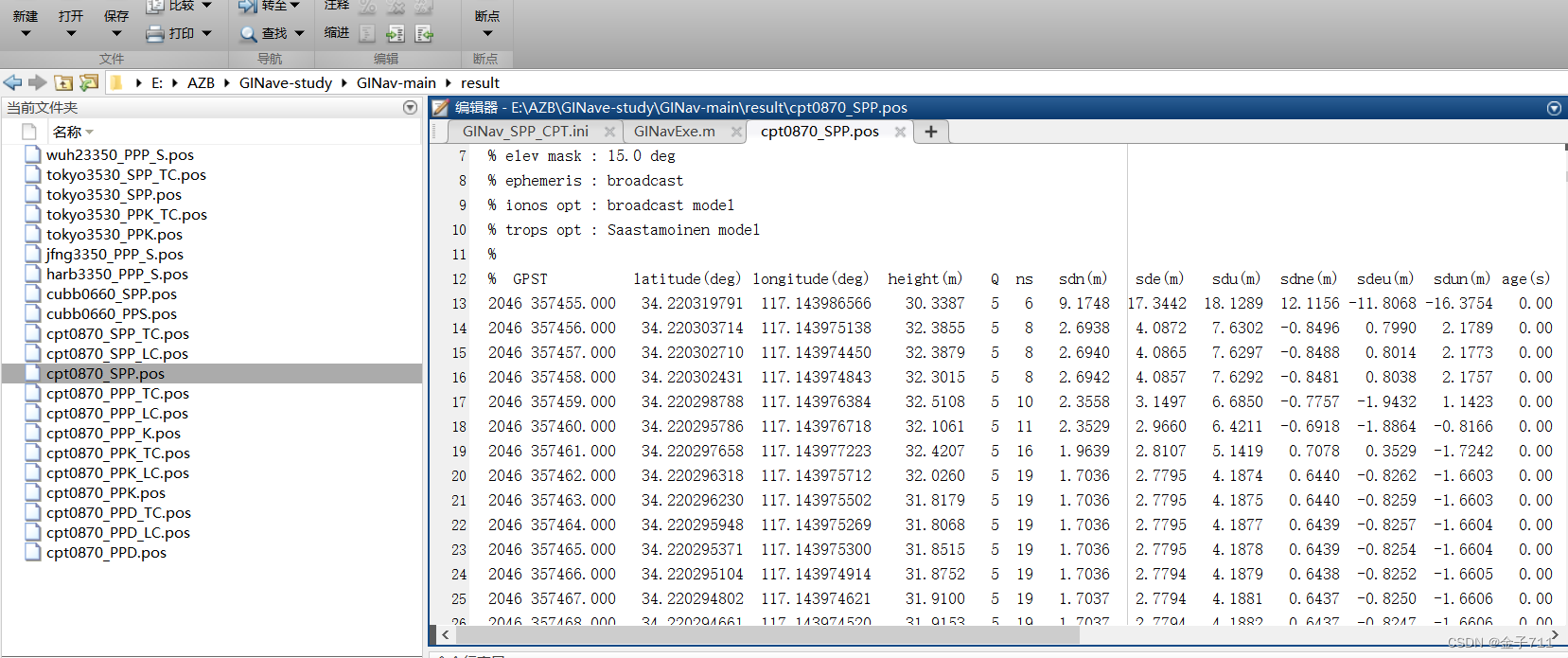
(4)查看SPP后测站的信息
根据我们之间的进行配置时,输进去的测站,找到对应的测站及天数。
(5)SPP绘图分析
选择plot-Analysis.m
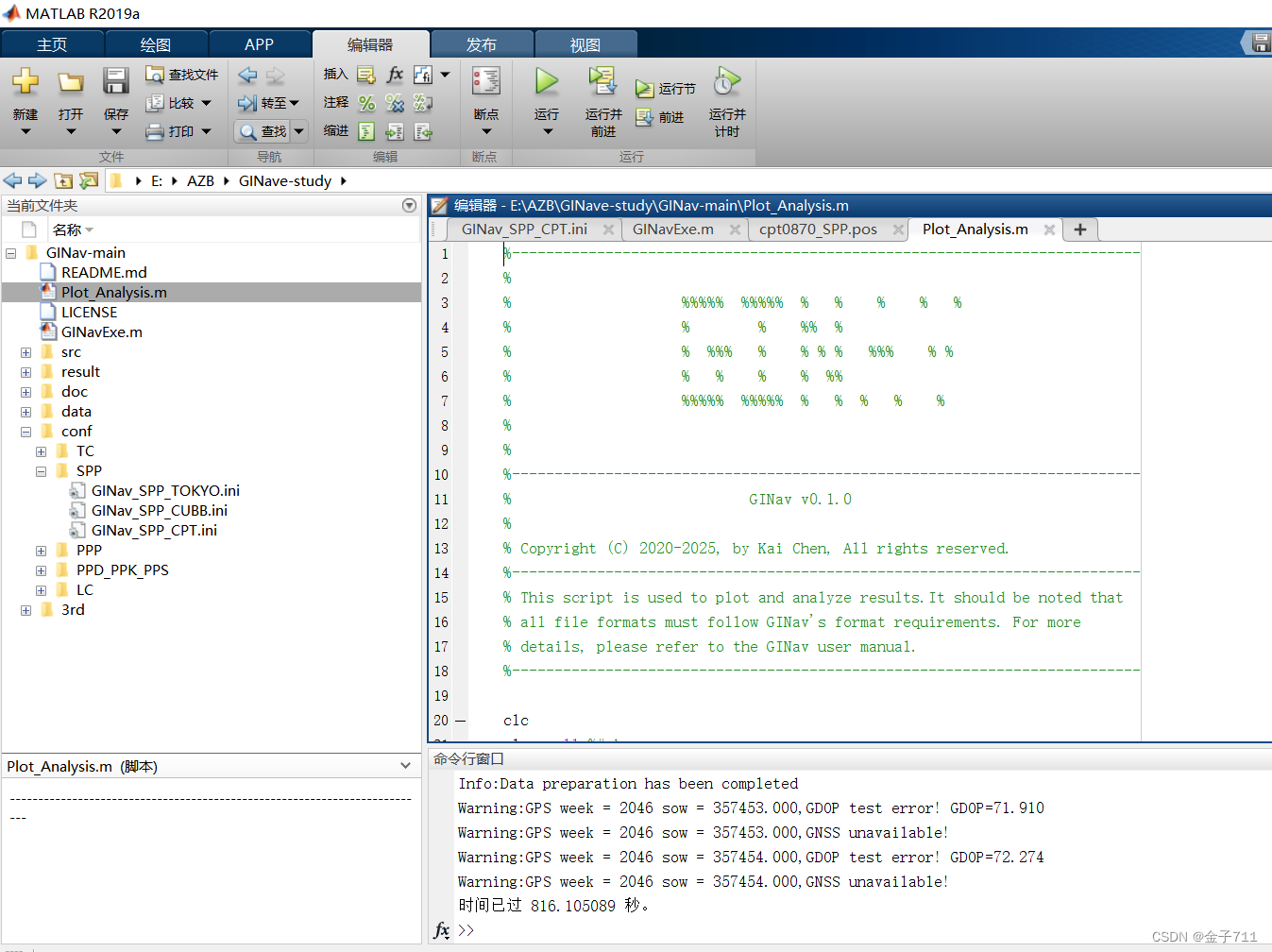
点击上端的运行,出现下面的绘图工具界面。
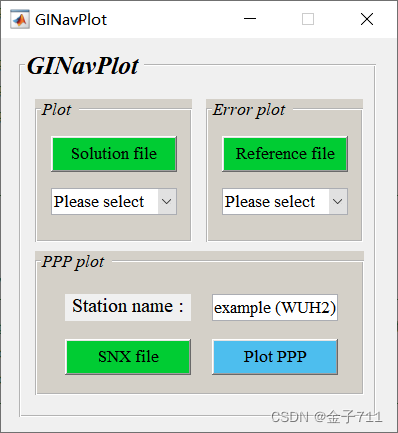
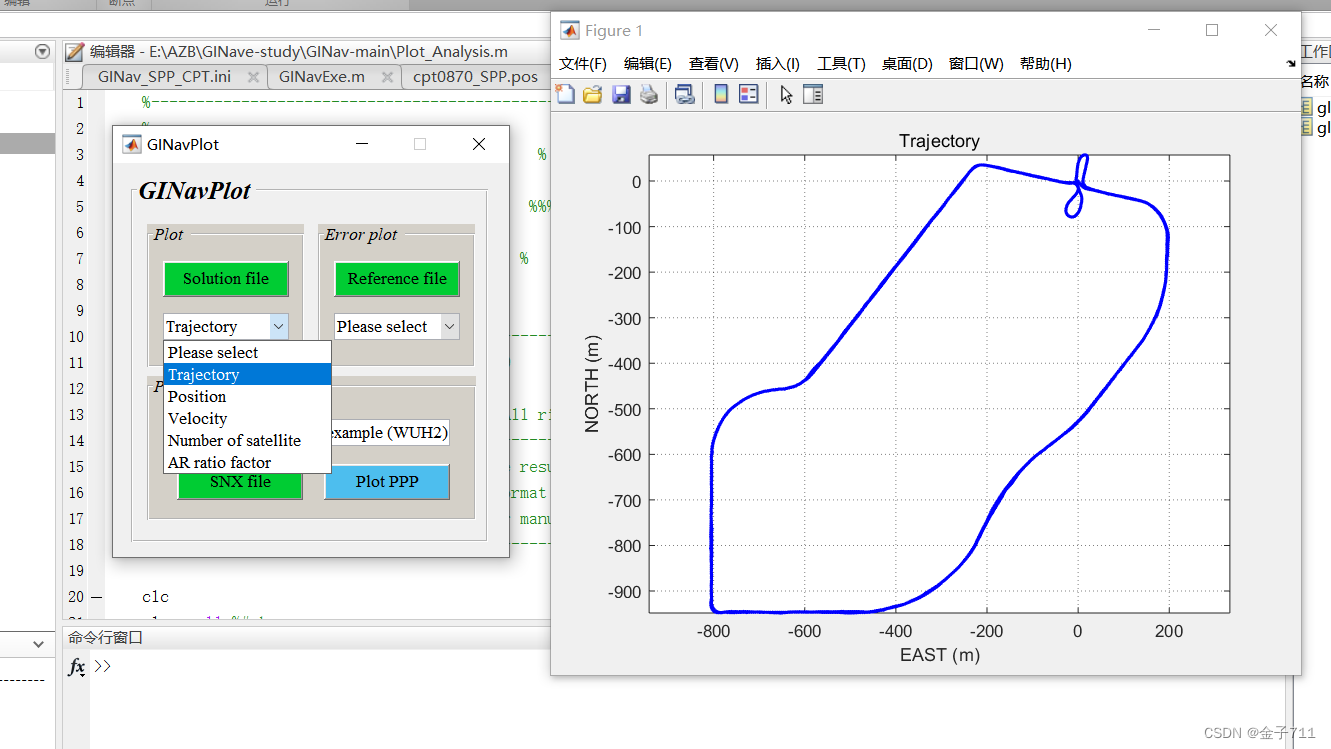
在plot界面下,点击Solution file,选择之前查看的那个文件cpt0870_SPP.pos
然后选择Trajectory出现右图
Position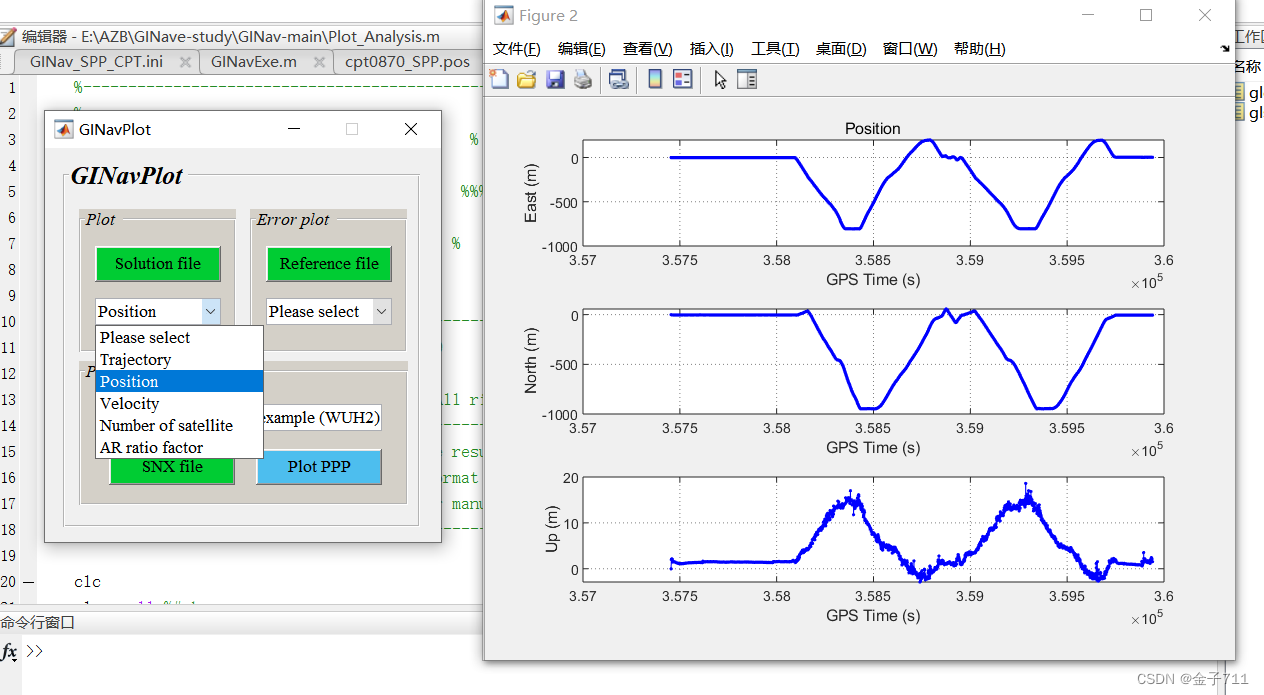
Velocity
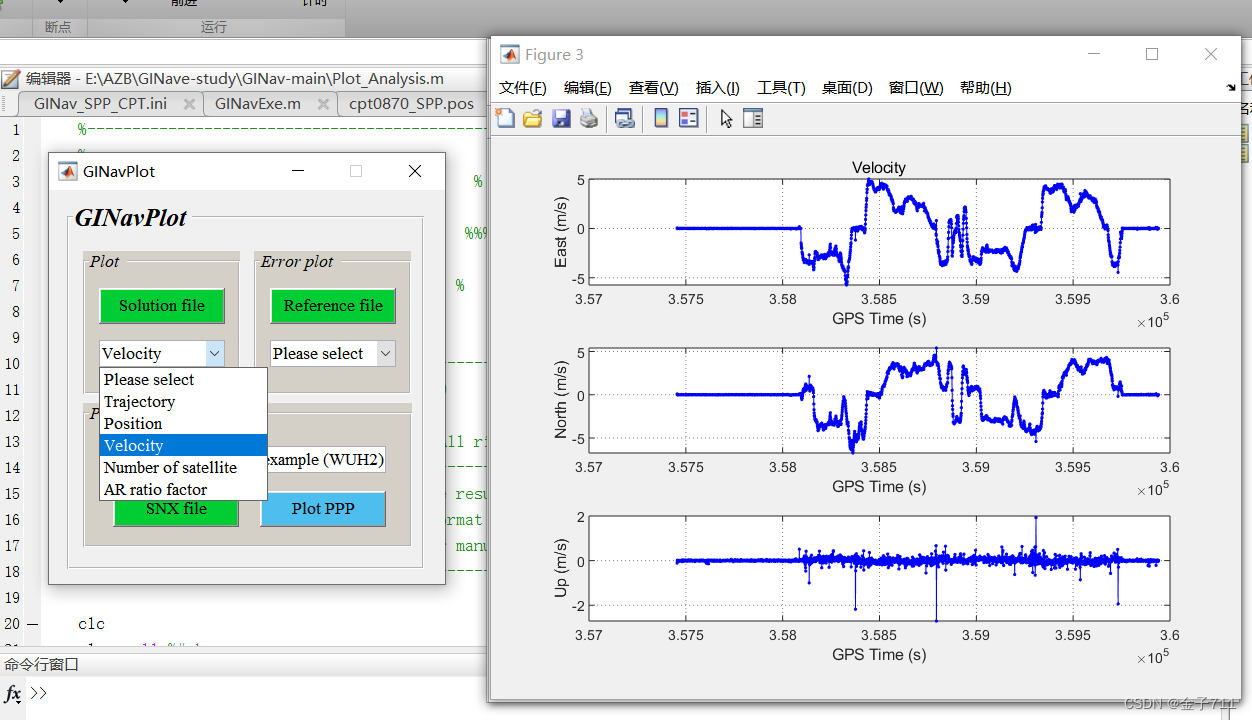
number of satellite
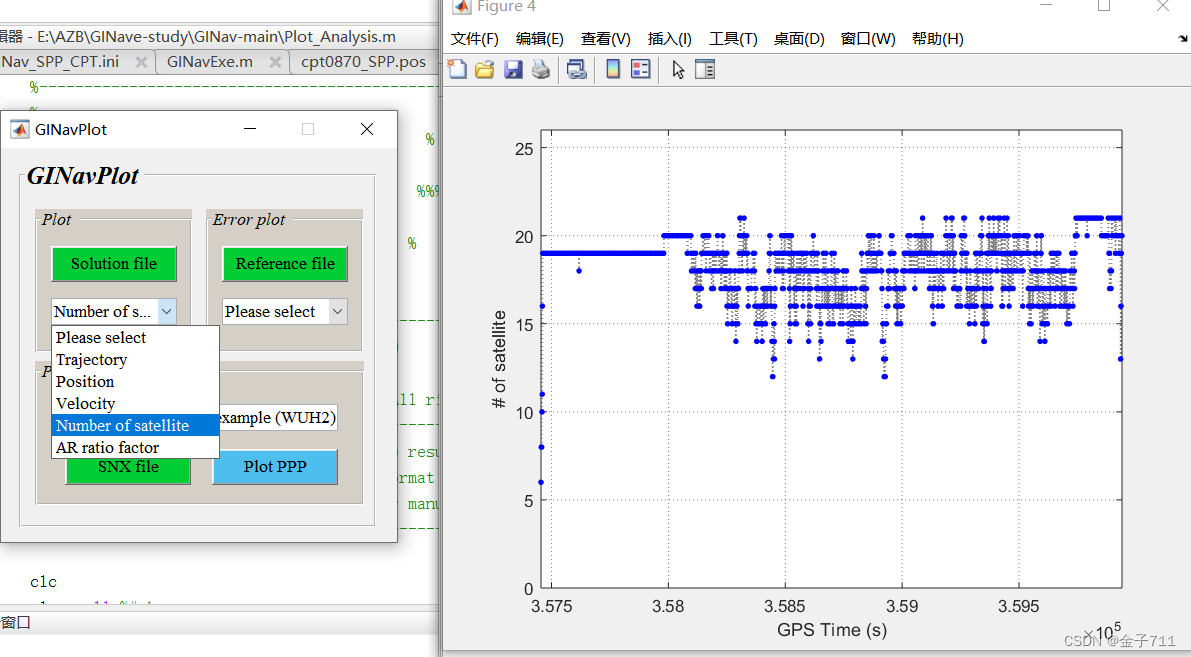
AR ratio factor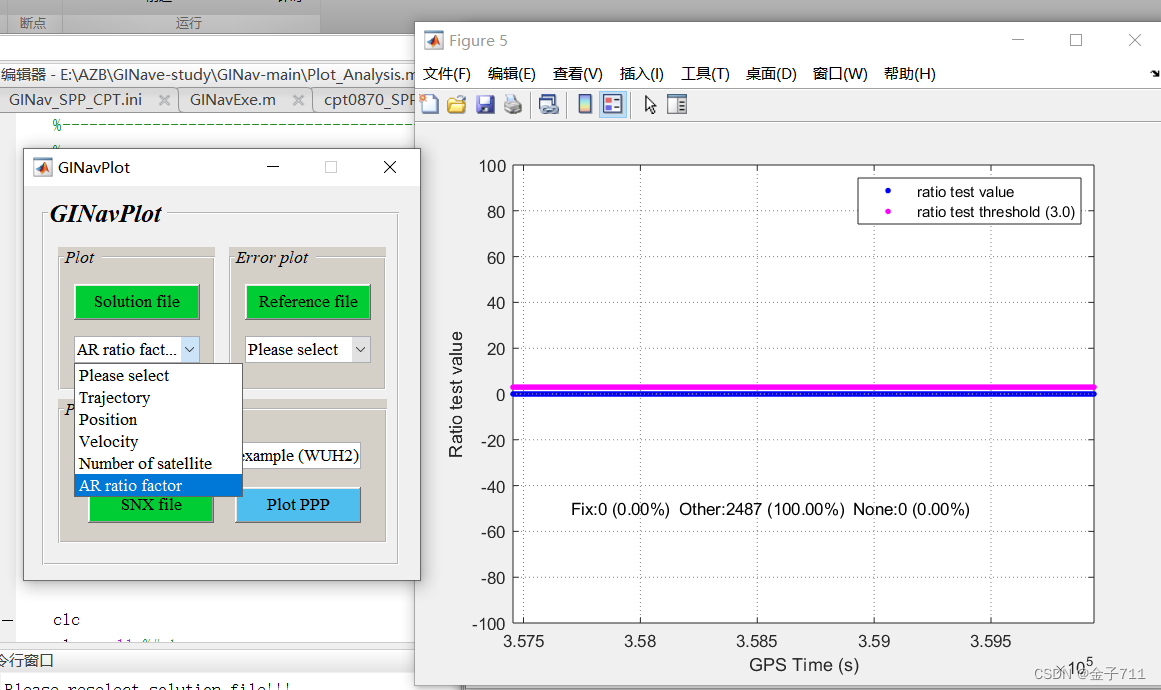
在plot-error页面下,选择Reference file,选择文件如下所示。
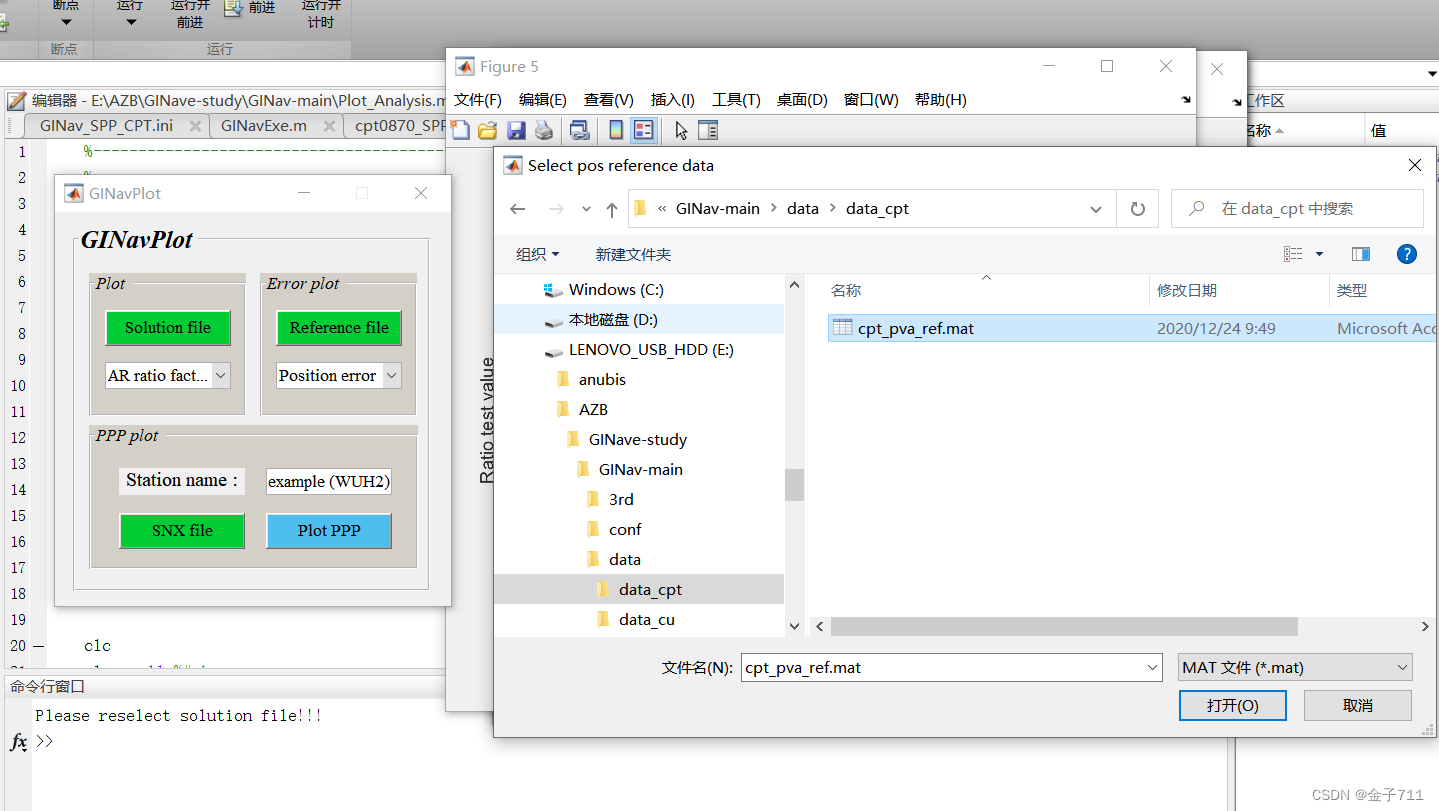
Position error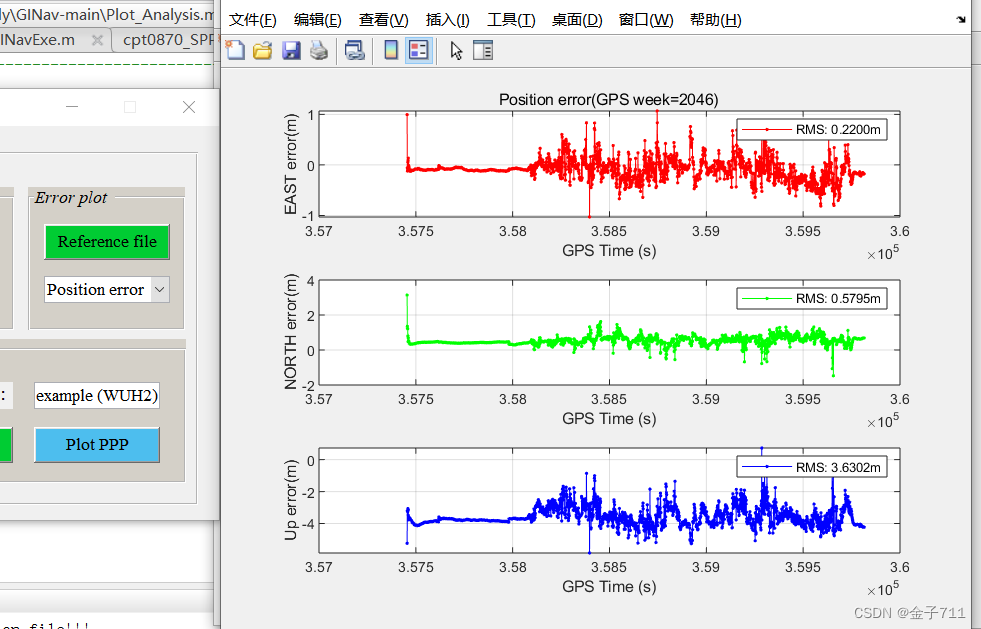
Velocity error 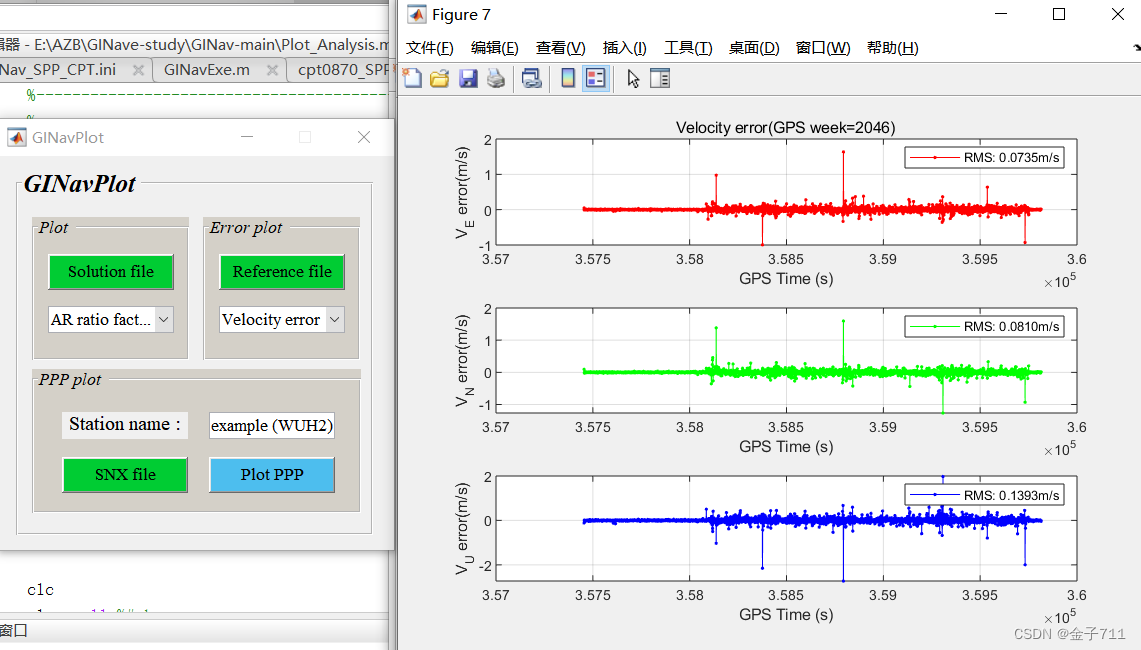
二:PPP运行示例
(1)matlab上加载GINav-main文件夹
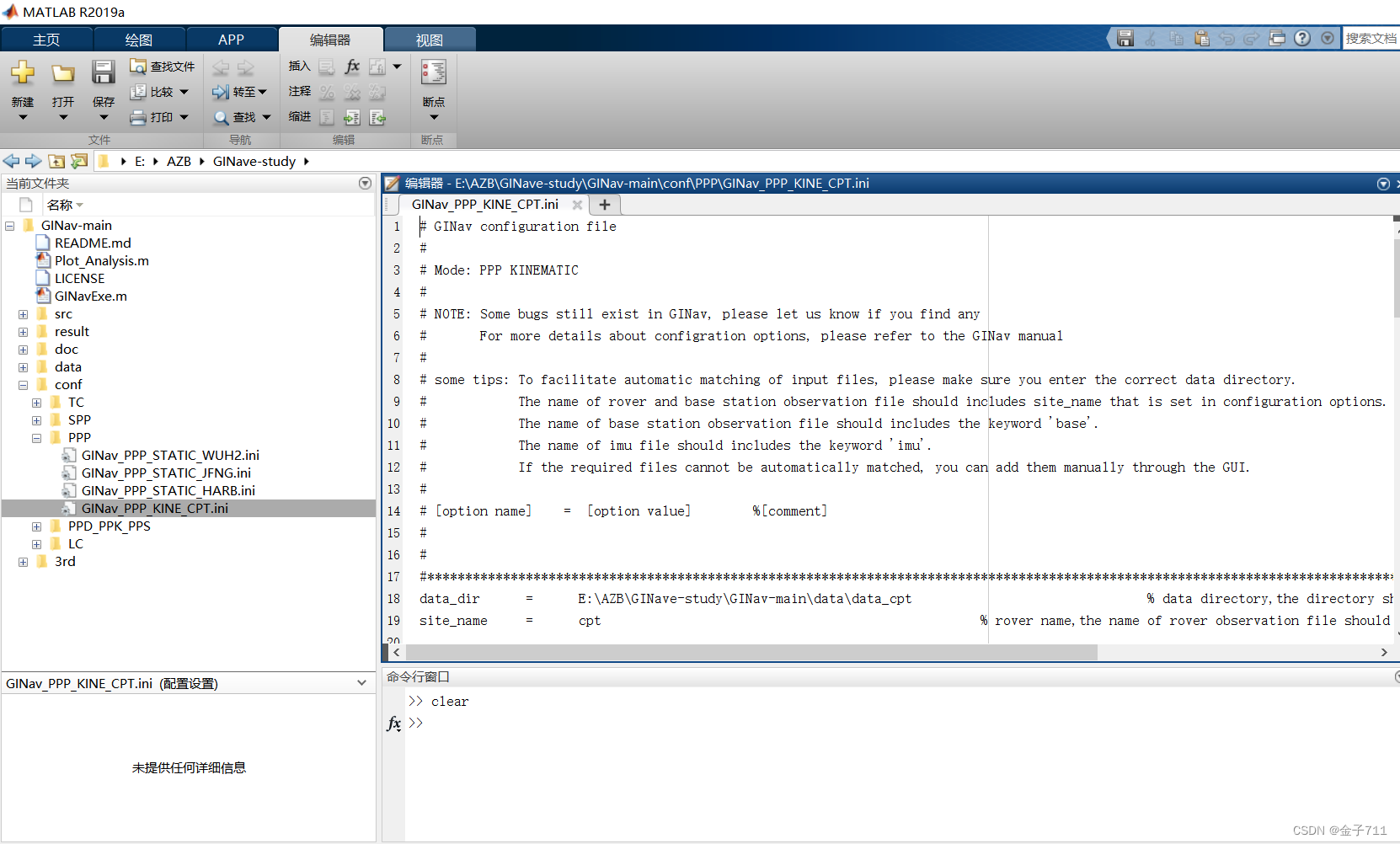
(2)修改PPP数据文件的路径
修改路径为安装路径:E:\AZB\GINave-study\GINav-main\data\data_cpt
修改如下所示,修改后保存
(3)修改PPP配置文件,运行
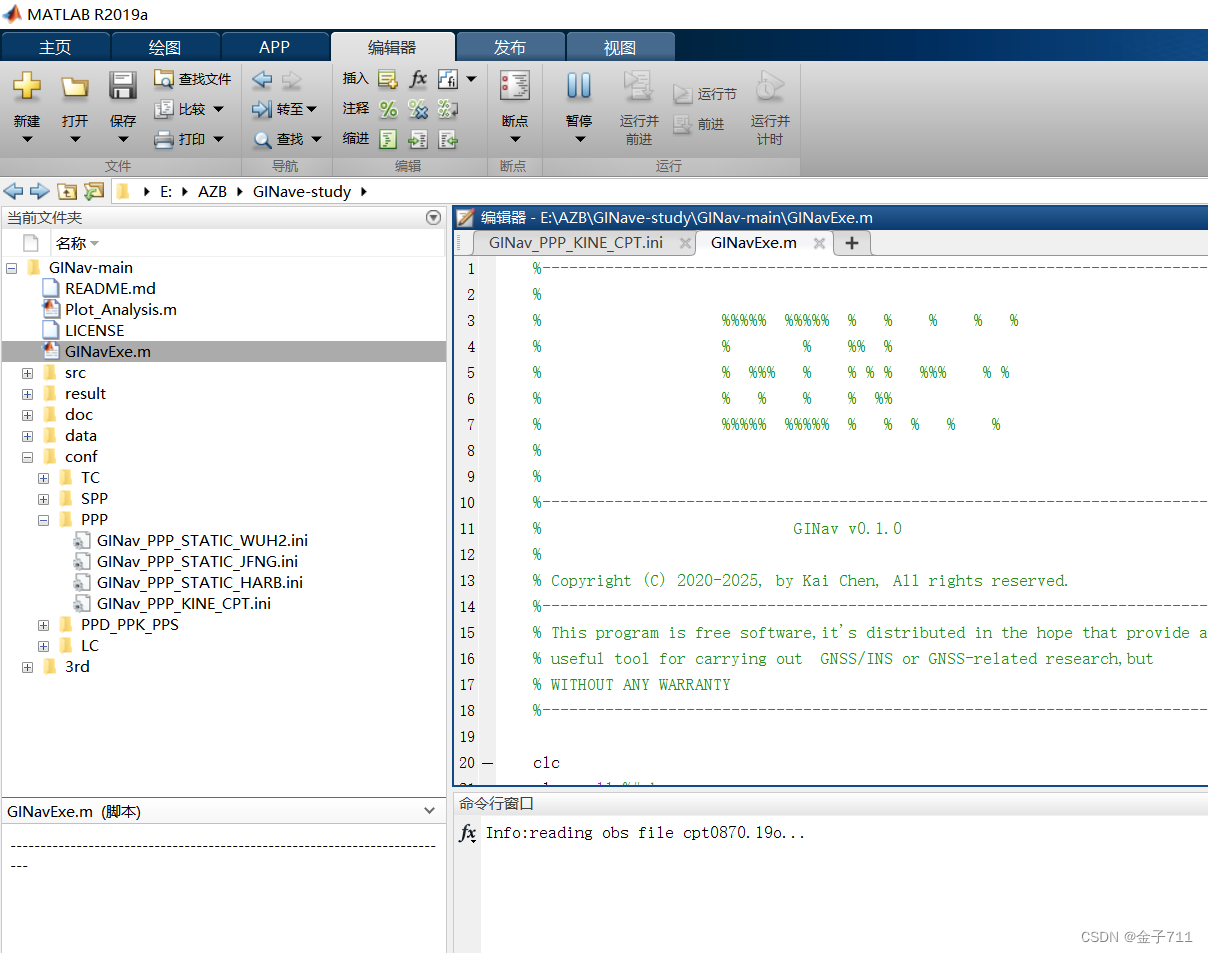
打开GINavExe.m,点击上端的运行,如下所示
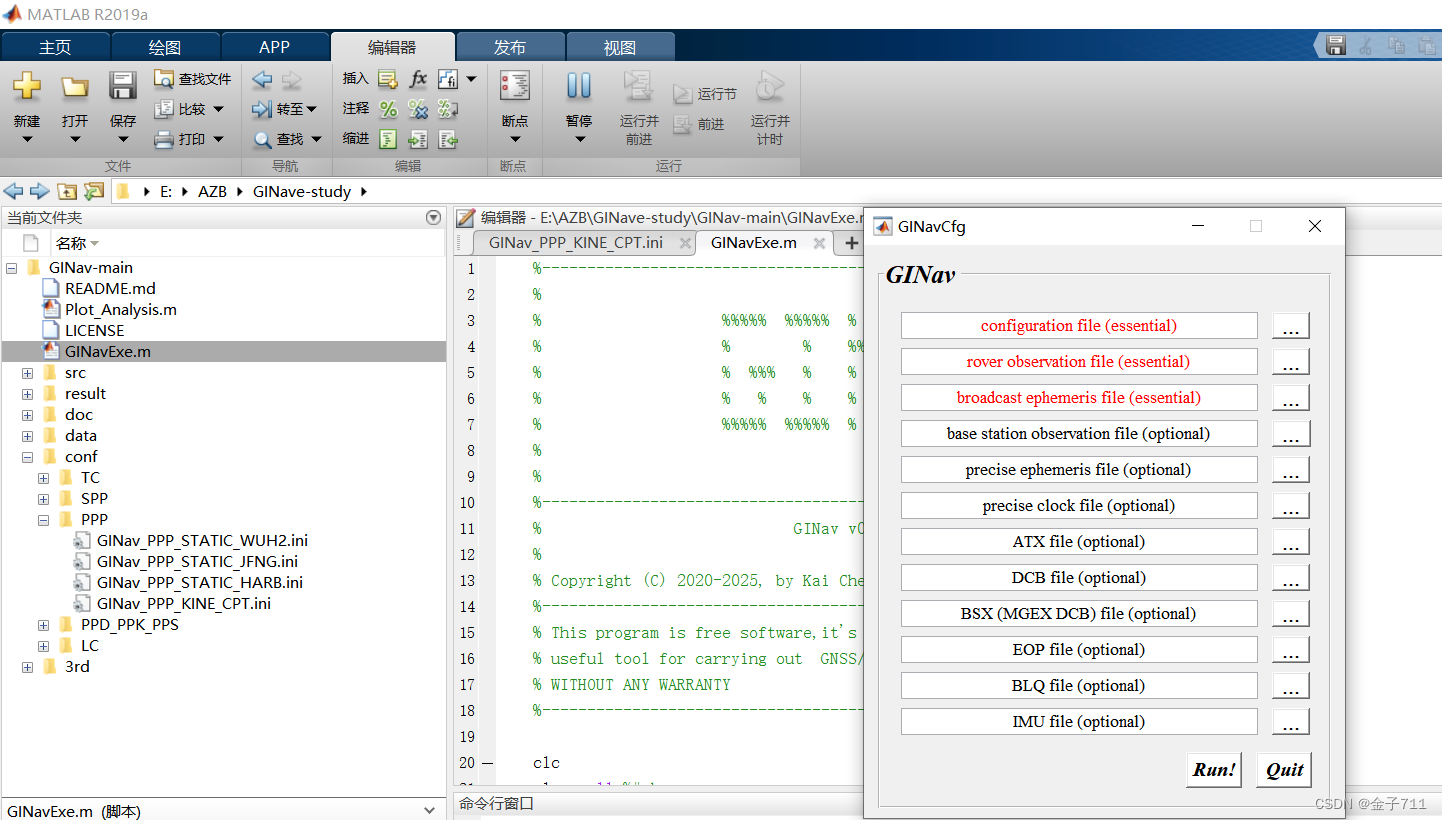
修改路径文件,点击configuration file(essential)后面的...,选择如下所示(为之前PPP更改数据路径的那个文件),如下所示
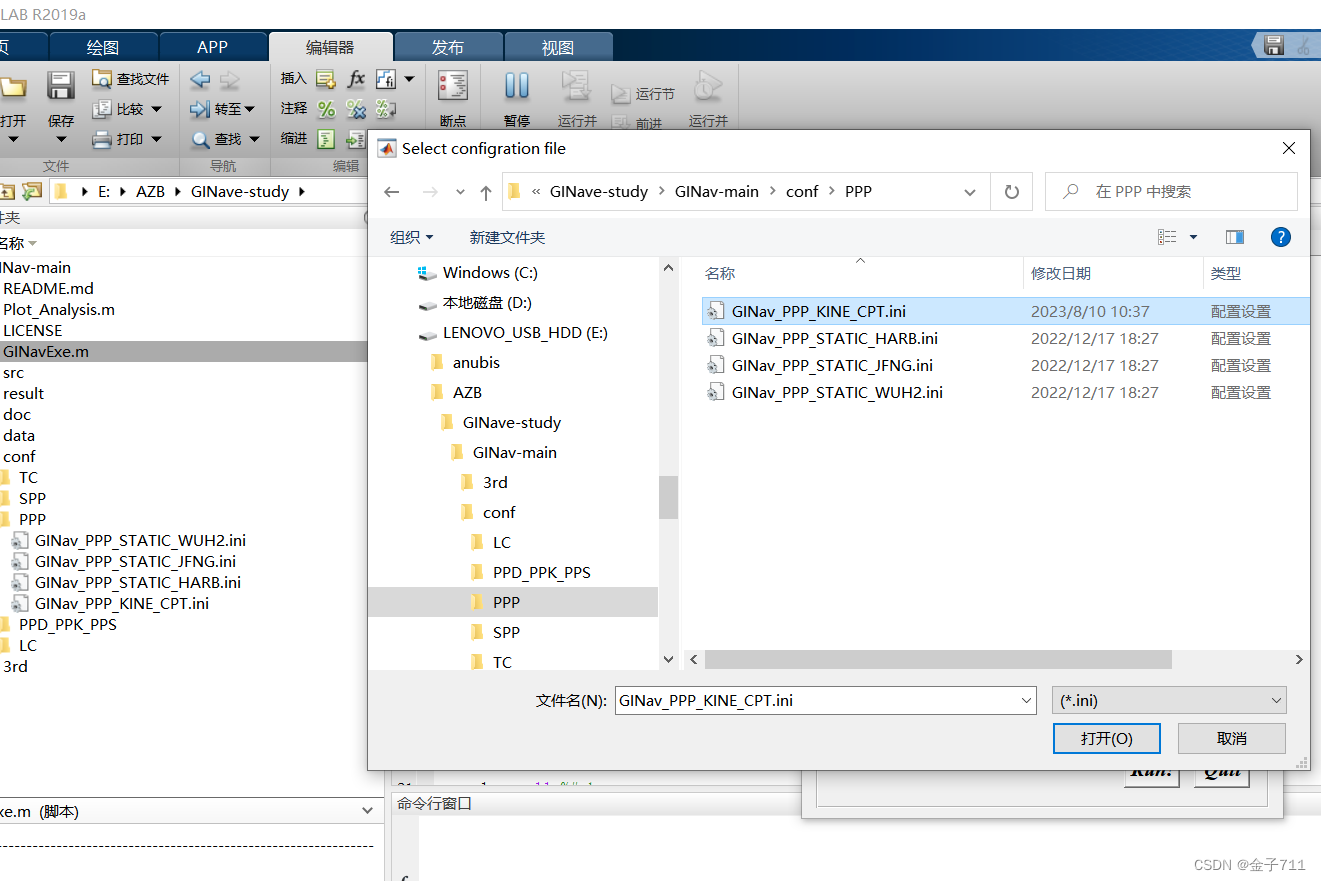
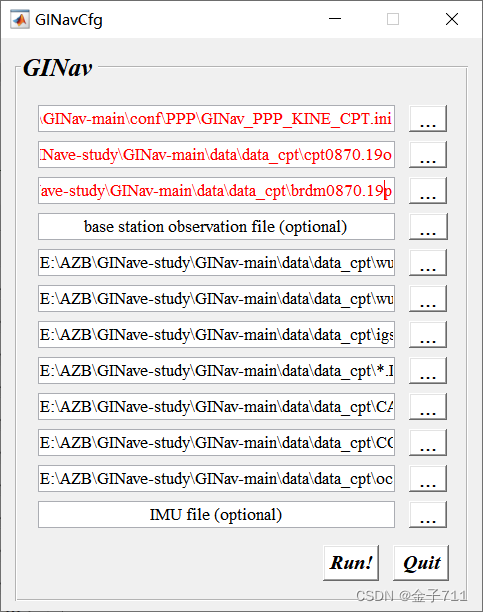
双击,出现下述界面。
点击Run!, 在这个过程中运行的非常的慢,刚开始如下。
运行一会后,出现了 下述的界面,开始SPP处理数据。
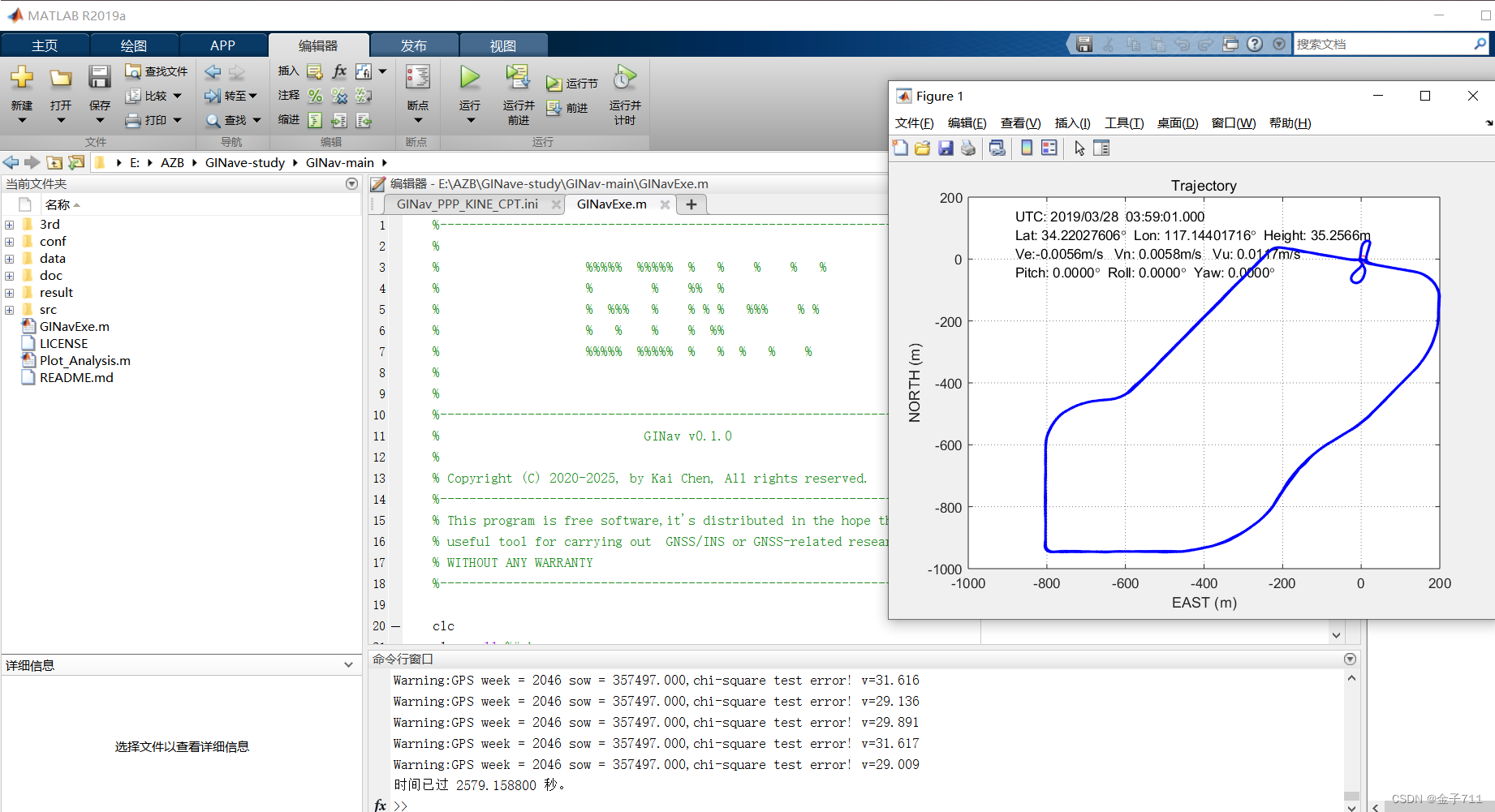
运行后,在命令行出现运行的结果,以及出现的图片。
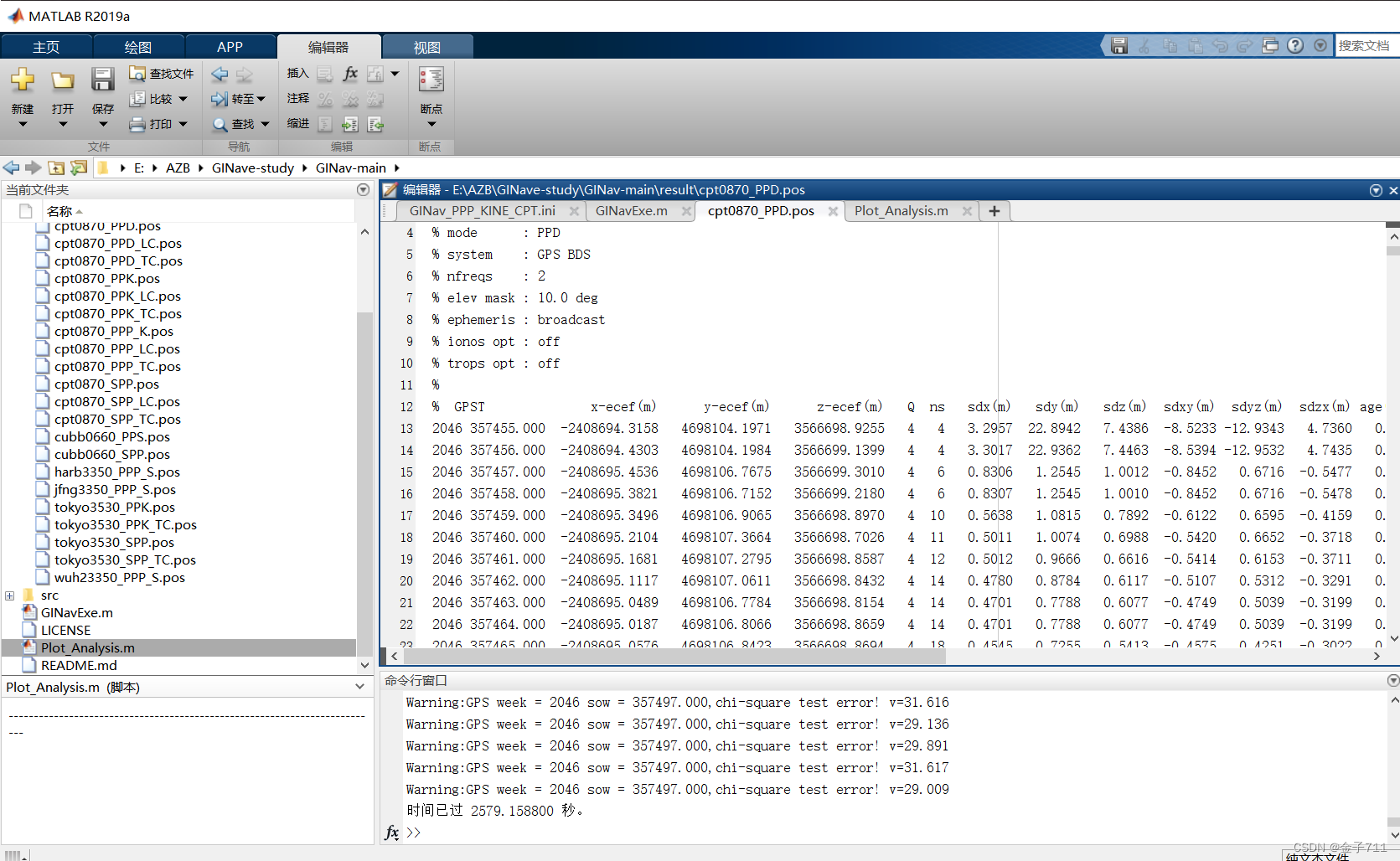
(4)查看PPP后测站的信息
根据我们之间的进行配置时,输进去的测站,找到对应的测站及天数。
(5)PPP绘图分析
选择plot-Analysis.m
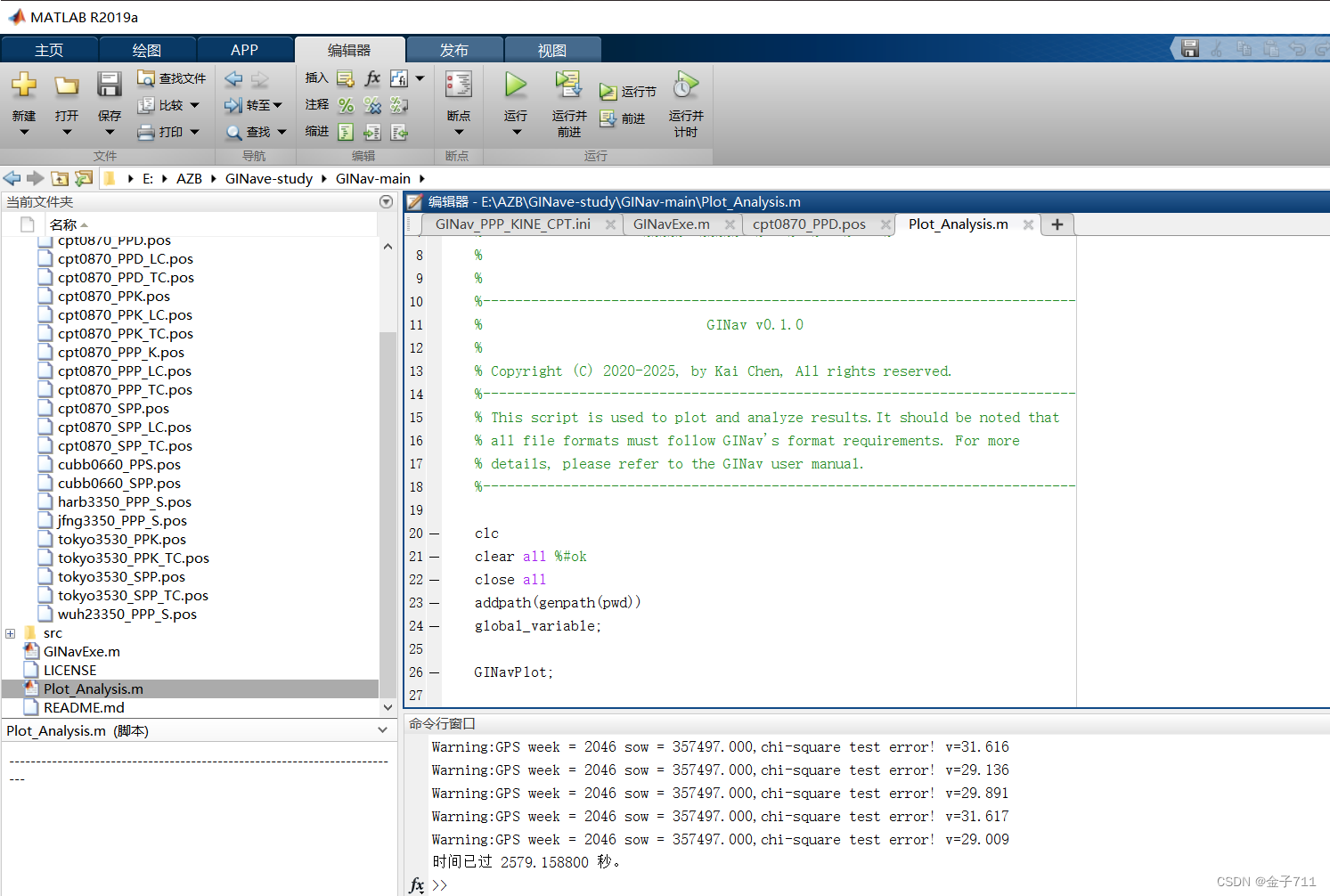
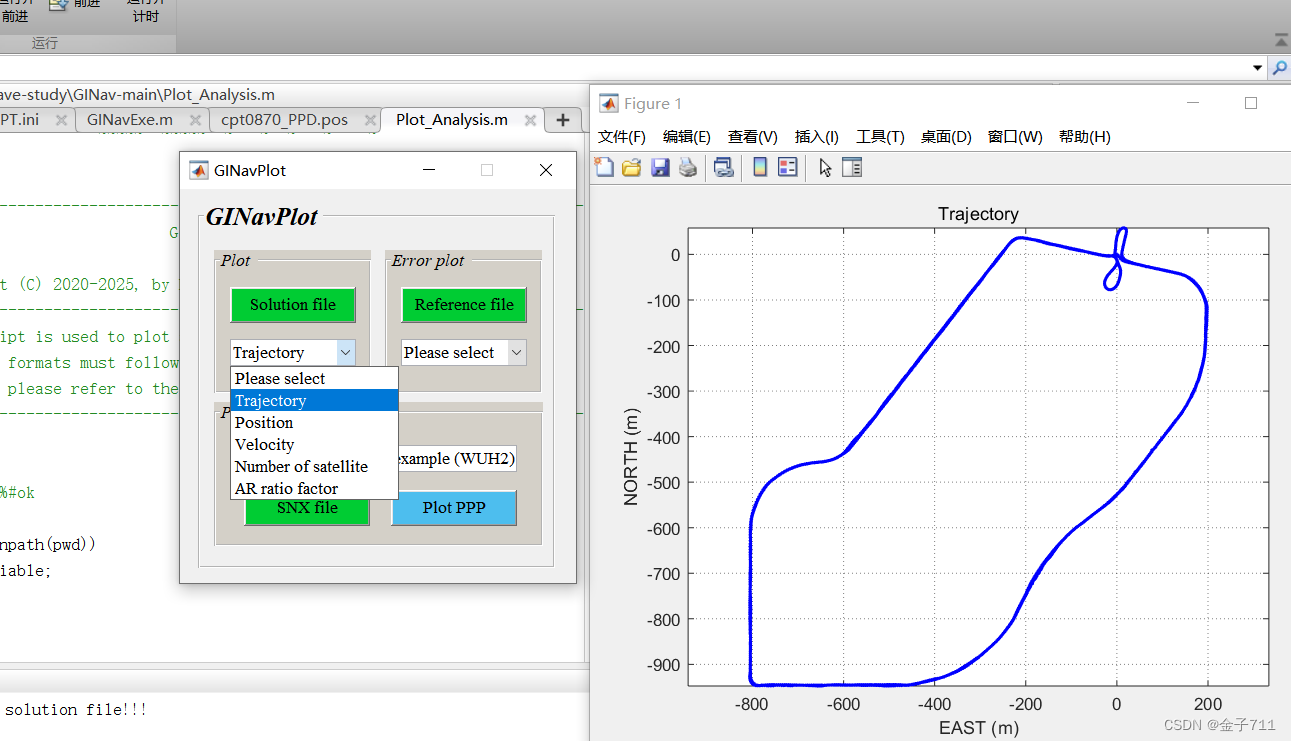
点击上端的运行,出现下面的绘图工具界面。
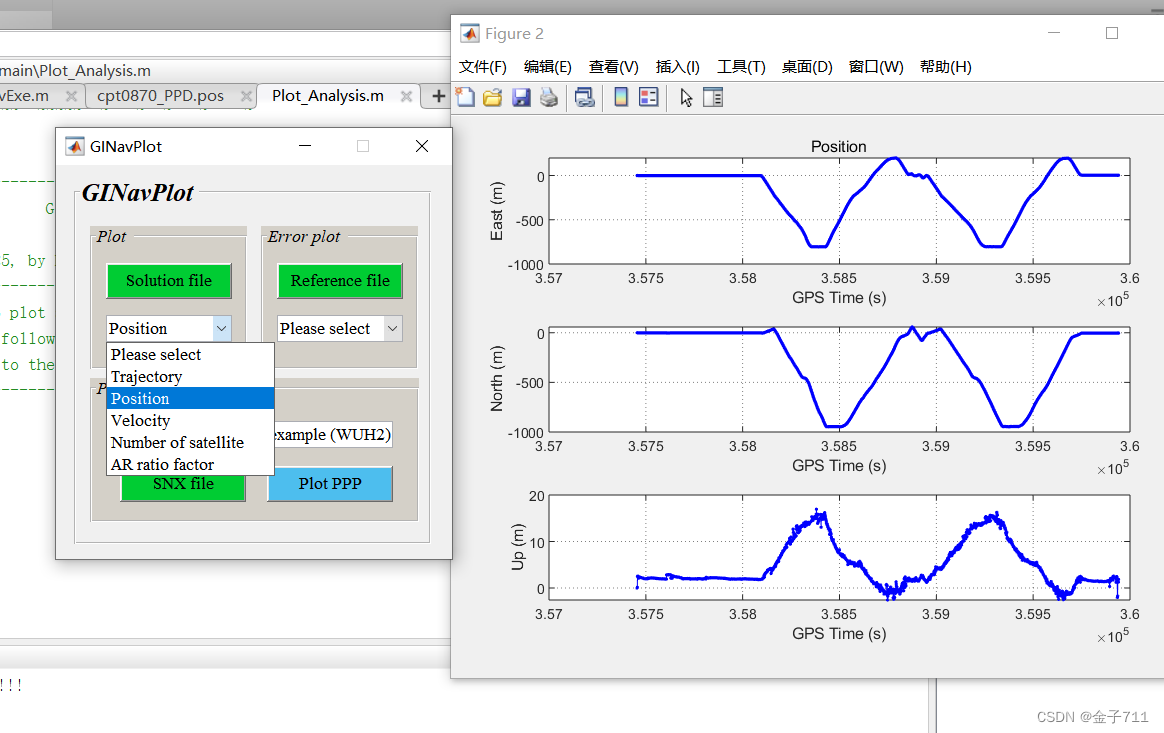
在plot界面下,点击Solution file,选择之前查看的那个文件cpt0870_PPD.pos
然后选择Trajectory出现右图
Position
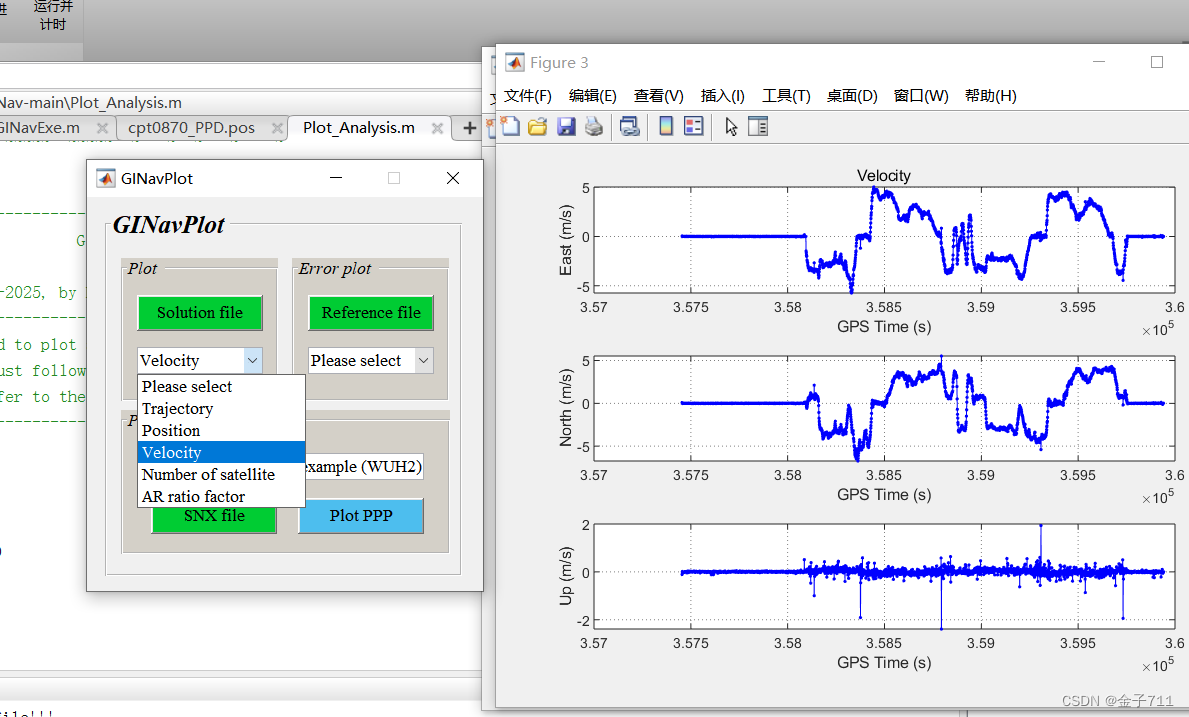
 Velocity
Velocity
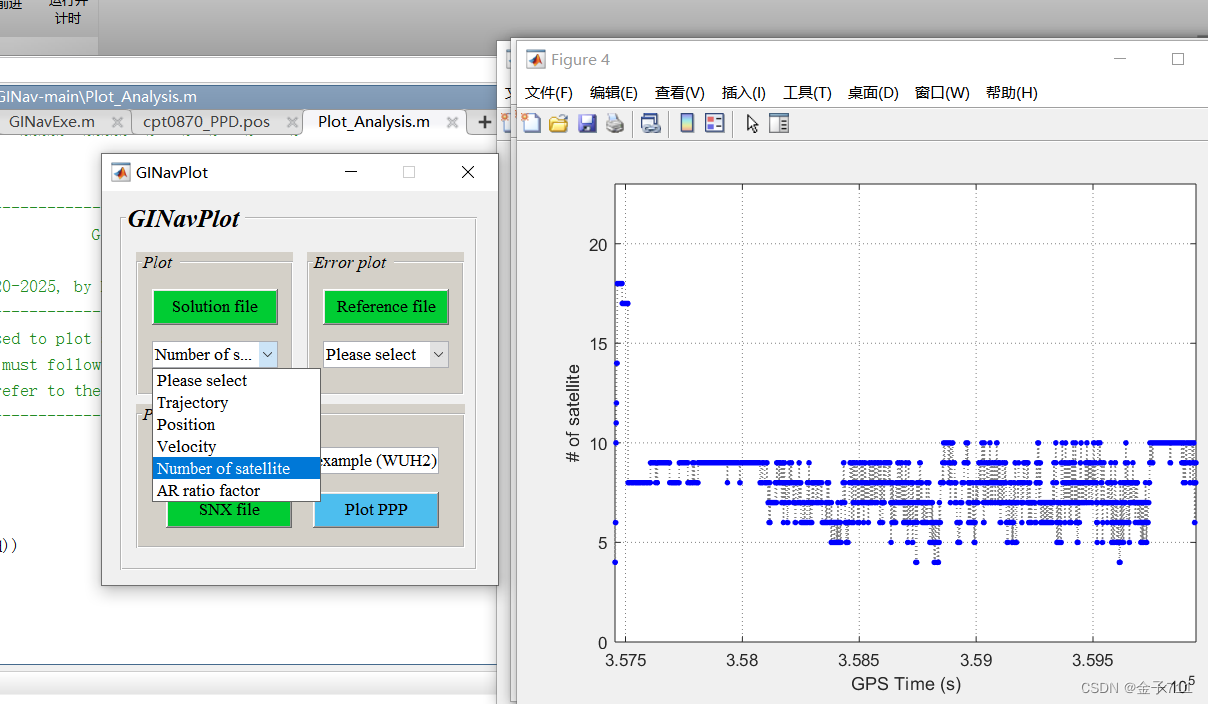
number of satellite
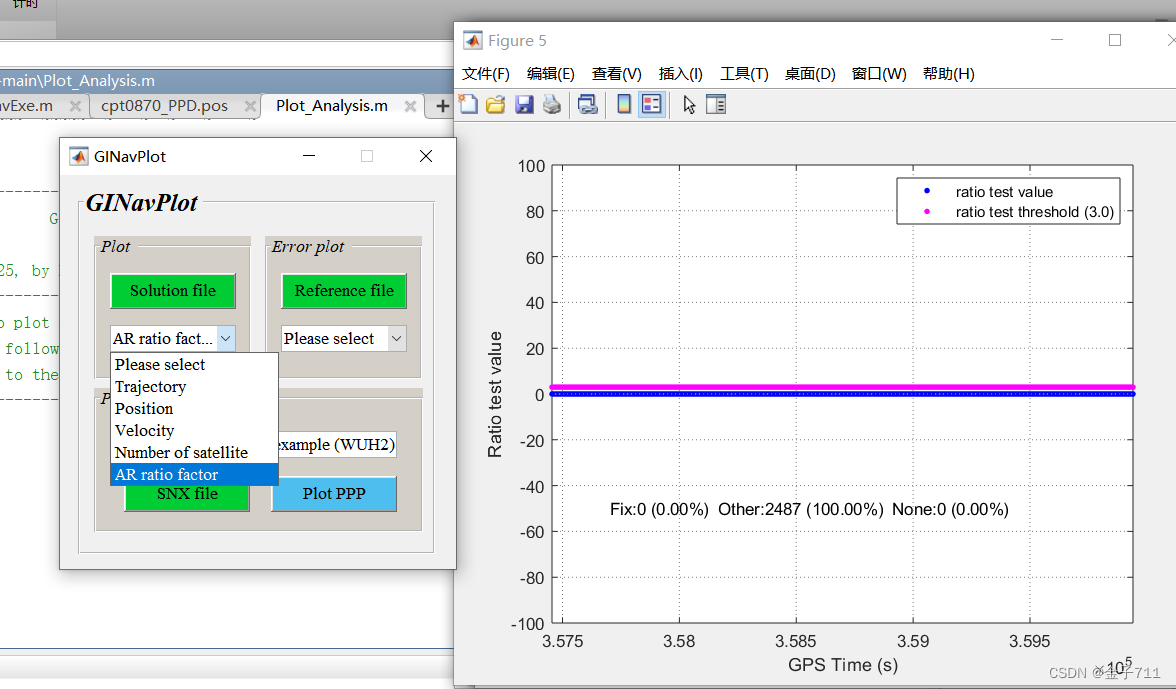
AR ratio factor
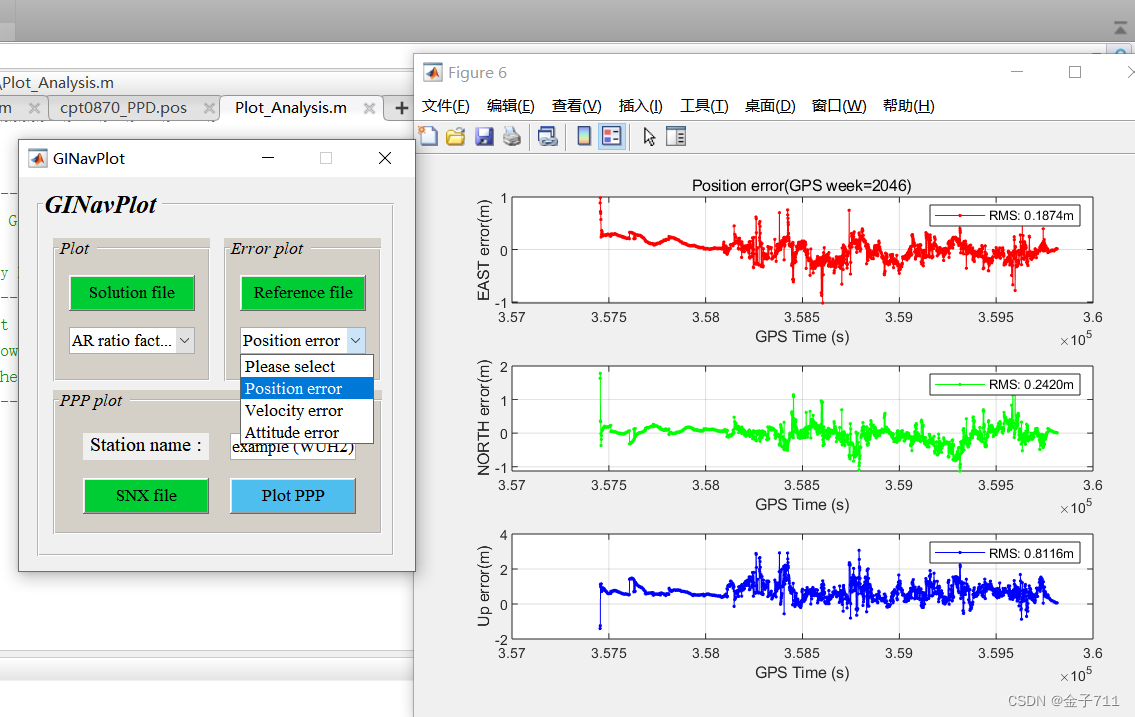
在plot-error页面下,选择Reference file,选择文件如下所示。
Position error
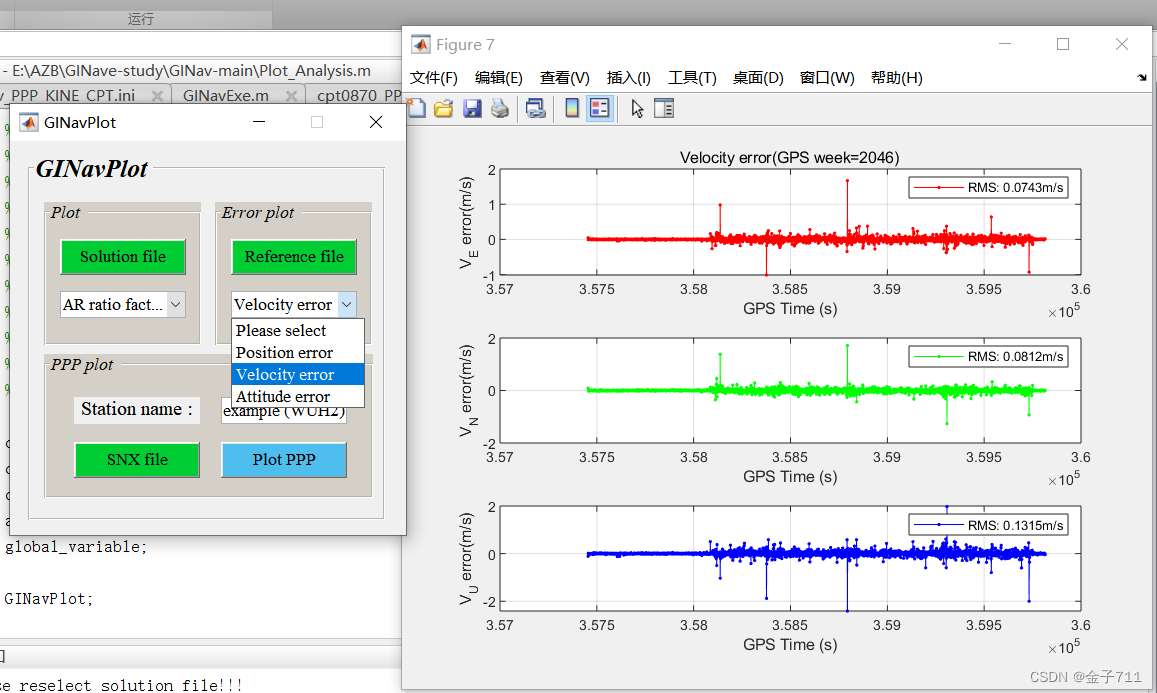
Velocity error

















 9165
9165

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









