






1、进入utils文件夹中的dataloads.py文件中
2、找到class LoadStreams,然后往下翻
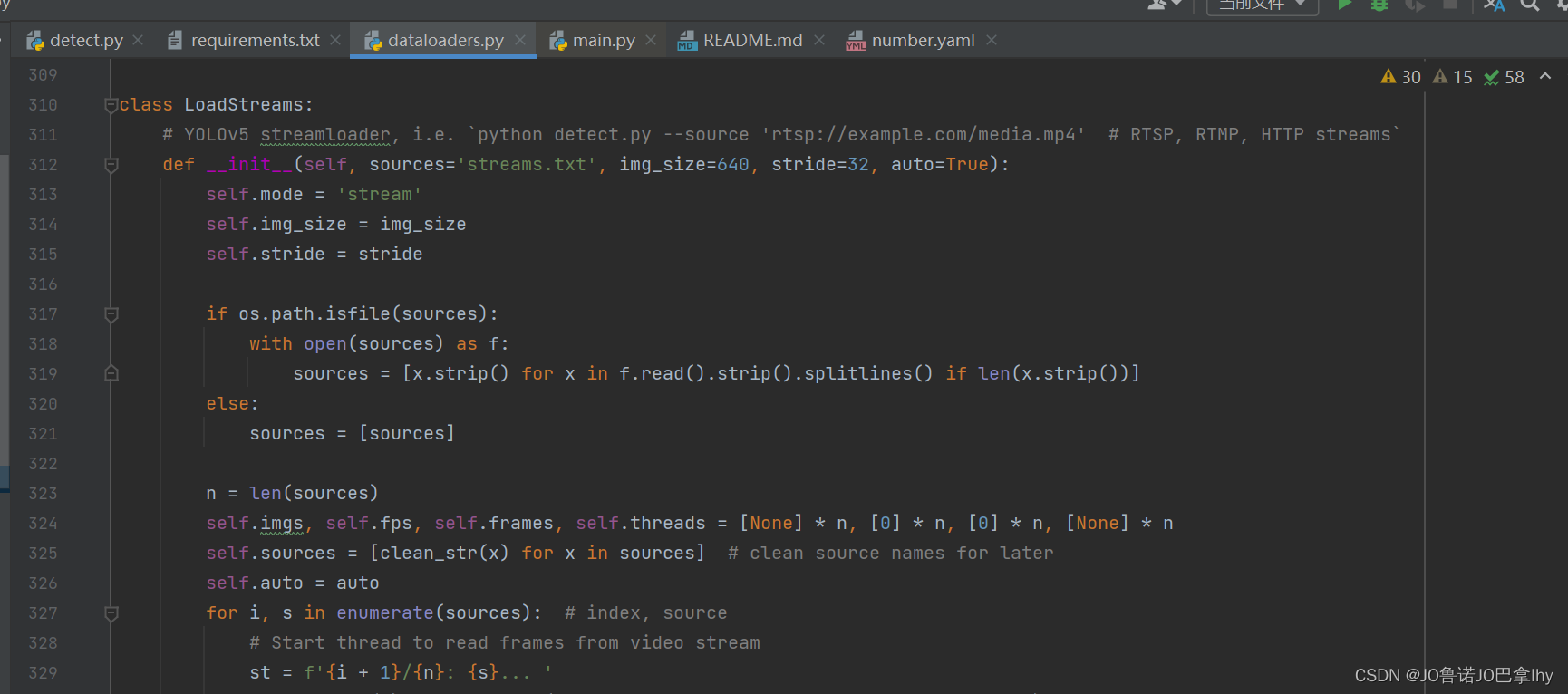
3、添加这两行代码(其中1280和720这两个参数是通过树莓派终端查看所连接的摄像头的参数来获得的,但我当时没有查找这两个参数,直接设定的1280和720就成功了)

4、如果找到摄像头的两个参数?
树莓派终端命令行输入:
sudo v4l2-ctl -d /dev/video10 --all(若失败则说明没安装V4l2工具包:
安装V4l2工具包,命令行输入:
sudo apt install v4l-utils
)
若成功则继续:
命令行中的输出为:
Driver Info (not using libv4l2):
Driver name : tegra-video
Card type : vi-output, mv-max9296 2-0004
Bus info : platform:15c10000.vi:0
Driver version: 4.9.201
Capabilities : 0x84200001
Video Capture
Streaming
Extended Pix Format
Device Capabilities
Device Caps : 0x04200001
Video Capture
Streaming
Extended Pix Format
Priority: 2
Video input : 0 (Camera 0: ok)
Format Video Capture:
Width/Height : 1280/720
Pixel Format : 'YUYV'
Field : None
Bytes per Line : 2560
Size Image : 1843200
Colorspace : sRGB
Transfer Function : Default (maps to sRGB)
YCbCr/HSV Encoding: Default (maps to ITU-R 601)
Quantization : Default (maps to Limited Range)
Flags :
Camera Controls
group_hold 0x009a2003 (bool) : default=0 value=0 flags=execute-on-write
gain 0x009a2009 (int64) : min=0 max=0 step=0 default=0 value=0 flags=slider
exposure 0x009a200a (int64) : min=0 max=0 step=0 default=0 value=59 flags=slider
frame_rate 0x009a200b (int64) : min=0 max=0 step=0 default=0 value=30000000 flags=slider
exposure_short 0x009a200c (int64) : min=0 max=0 step=0 default=0 value=59 flags=slider
sensor_configuration 0x009a2032 (u32) : min=0 max=0 step=0 default=0 flags=read-only, volatile, has-payload
sensor_mode_i2c_packet 0x009a2033 (u32) : min=0 max=0 step=0 default=0 flags=read-only, volatile, has-payload
sensor_control_i2c_packet 0x009a2034 (u32) : min=0 max=0 step=0 default=0 flags=read-only, volatile, has-payload
bypass_mode 0x009a2064 (intmenu): min=0 max=1 default=0 value=0
override_enable 0x009a2065 (intmenu): min=0 max=1 default=0 value=0
height_align 0x009a2066 (int) : min=1 max=16 step=1 default=1 value=1
size_align 0x009a2067 (intmenu): min=0 max=2 default=0 value=0
write_isp_format 0x009a2068 (int) : min=1 max=1 step=1 default=1 value=1
sensor_signal_properties 0x009a2069 (u32) : min=0 max=0 step=0 default=0 flags=read-only, has-payload
sensor_image_properties 0x009a206a (u32) : min=0 max=0 step=0 default=0 flags=read-only, has-payload
sensor_control_properties 0x009a206b (u32) : min=0 max=0 step=0 default=0 flags=read-only, has-payload
sensor_dv_timings 0x009a206c (u32) : min=0 max=0 step=0 default=0 flags=read-only, has-payload
low_latency_mode 0x009a206d (bool) : default=0 value=0
preferred_stride 0x009a206e (int) : min=0 max=65535 step=1 default=0 value=0
sensor_modes 0x009a2082 (int) : min=0 max=30 step=1 default=30 value=4 flags=read-only
其中摄像头分辨率为
Width/Height : 1280/720具体数值因人而异,然后把这两个数值用来做上面的第三步的操作,问题解决。















 1824
1824

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









