






ZMC408CE 高性能总线型运动控制器
ZMC408CE是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。
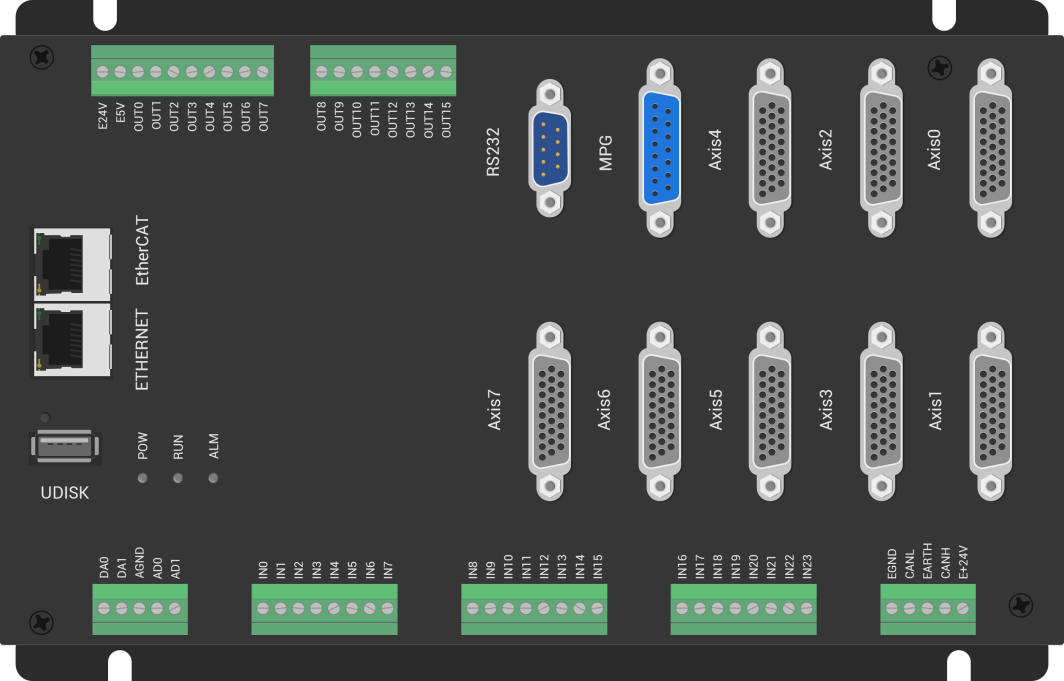
ZMC408CE支持PLC、Basic、HMI组态三种编程方式。PC上位机API编程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

ZMC408CE硬件功能特性:
1.支持8轴运动控制(脉冲+EtherCAT总线),EtherCAT同步周期可快至125us;
2.24路通用输入、16路通用输出,模拟量AD/DA各两路;
3.8路10MHz高速差分脉冲输出,总线轴、脉冲轴可混合插补;
4.高性能处理器,提升运算速度、响应时间和扫描周期等;
5.一维/二维/三维、多通道视觉飞拍,高速高精;
6.位置同步输出PSO,连续轨迹加工中对精密点胶胶量控制和激光能量控制等;
7.多轴同步控制,多坐标系独立控制等;
8.直线插补、任意空间圆弧插补、螺旋插补、样条插补等;
9.应用灵活,可PC上位机开发,也可脱机独立运行;
ZMC408CE视频介绍→“高性能EtherCAT总线运动控制器,带你玩转“8通道独立PSO”应用场景”。
更多关于ZMC408CE的详情介绍,点击“推荐|8通道PSO的高性能EtherCAT总线运动控制器”查看。
PCIE464M PCIe EtherCAT总线运动控制卡
PCIE464M是一款基于PCIe的PCI Express的EtherCAT总线运动控制卡,具有多项实时和高精度运动控制控制功能。
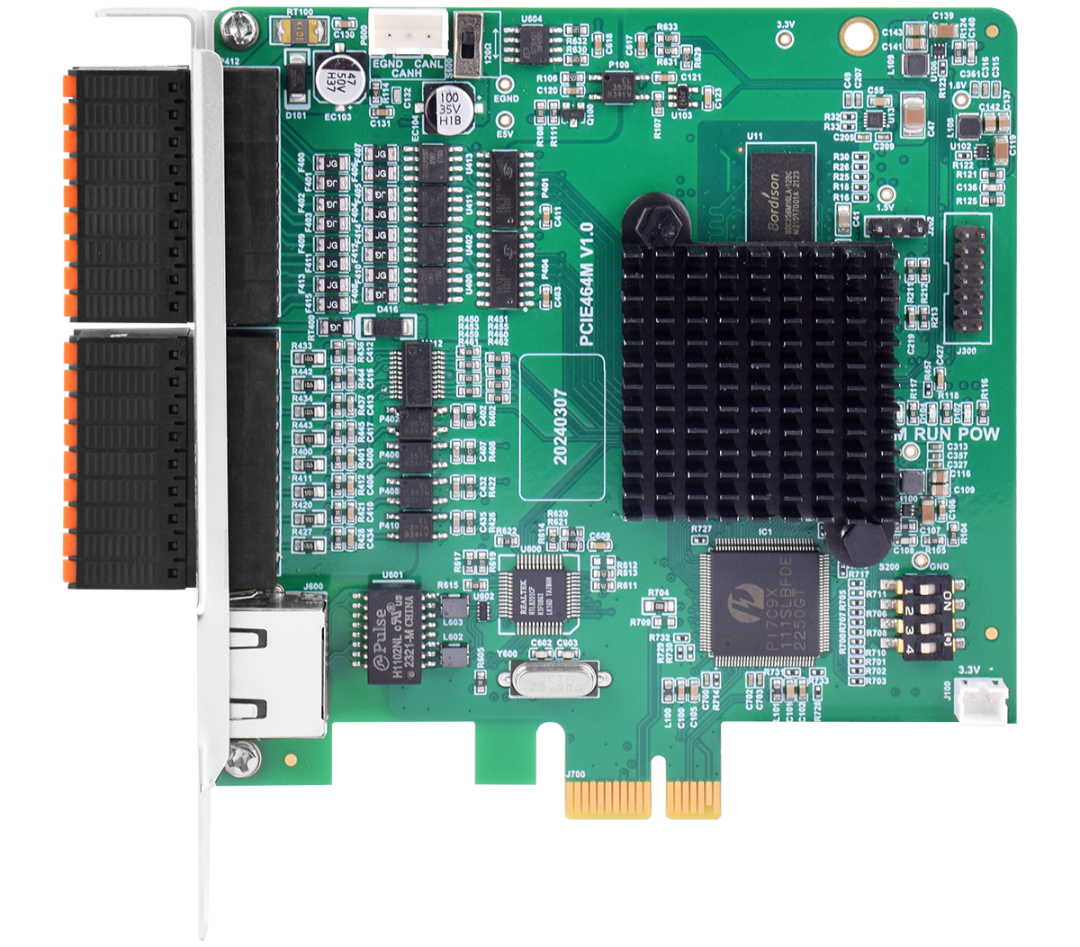
PCIE464M运动控制卡上自带16进16出,第三方图像处理工控机或PC无需额外配置IO数据采集卡和PLC,即可实现IPC形态的机器视觉运动控制一体机,简化硬件架构,节省成本,软硬件一体化。

PCIE464M硬件功能特性:
1.可选6-64轴运动控制,支持EtherCAT总线/脉冲/步进伺服驱动器;
2.联动轴数最高可达16轴,运动周期最小为100μs;
3.标配16进16出,其中4路高速锁存输入、4路高速PWM和12路高速硬件比较输出PSO;
4.支持PWM输出、1D/2D/3D PSO硬件位置比较输出、视觉飞拍、连续轨迹插补等;
5.支持30+机械手模型正逆解模型算法,比如SCARA、Delta、UVW、4轴/5轴 RTCP...;
6.支持掉电存储和掉电中断,多重加密,提供程序更安全机制;
7.8路单端脉冲轴、4路单端编码器轴;
8.具有一维、二维螺距补偿控制,实现更高的加工精度;
PCIE464M视频介绍,请点击→“超高速PCle EtherCAT控制卡PCIE464M,即刻提升高速高精智能装备生产力!”。查看
更多关于PCIE464M的详情介绍,点击“PCIE464M-高速高精,超高速PCIe EthrtCAT实时运动控制卡”查看。
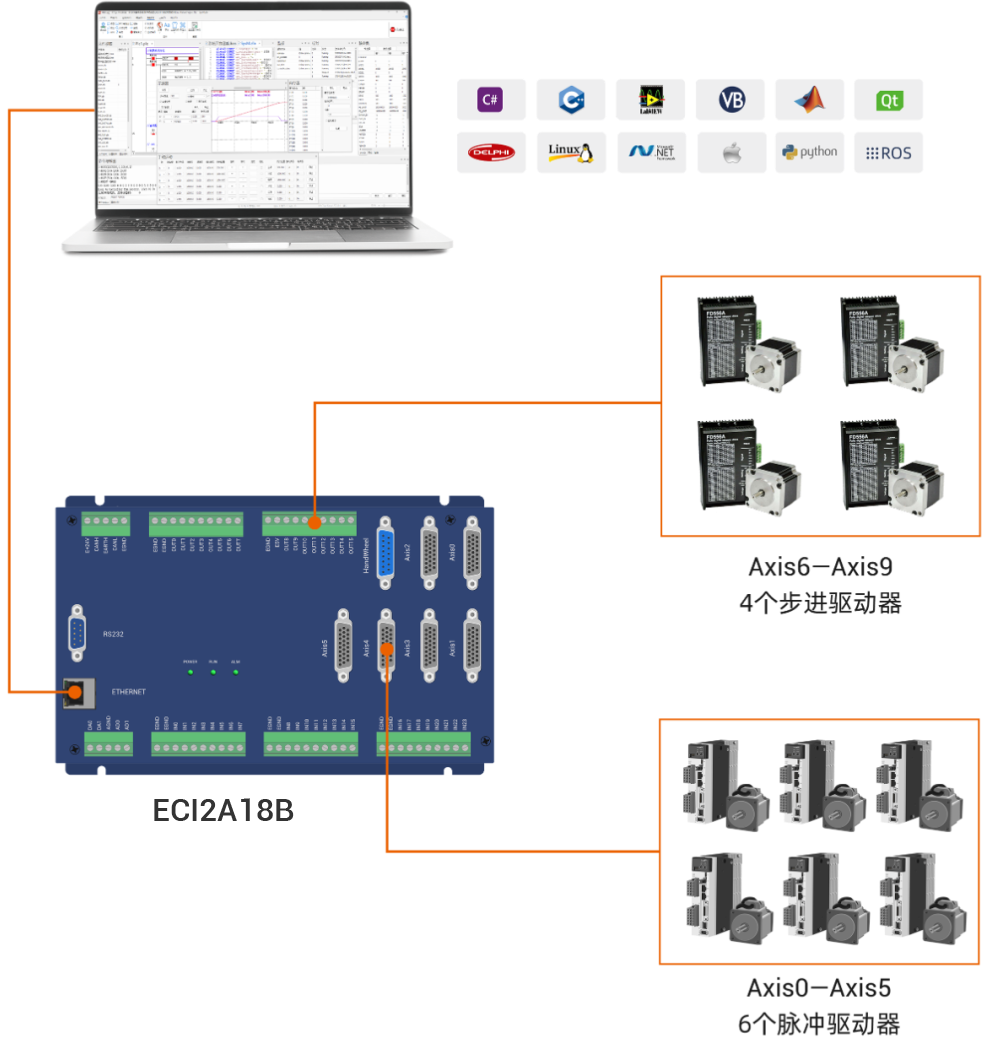
ECI2A18B 高性价比10轴运动控制卡
ECI2A18B是正运动推出的一款高性价比10轴脉冲型、模块化的网络型运动控制卡,采用优化的网络通讯协议可以实现实时的运动控制,同时支持多种通信协议,方便与其他工业控制设备连接和集成。安装配置相对便捷,适合于模块化和灵活性要求较高的控制系统。
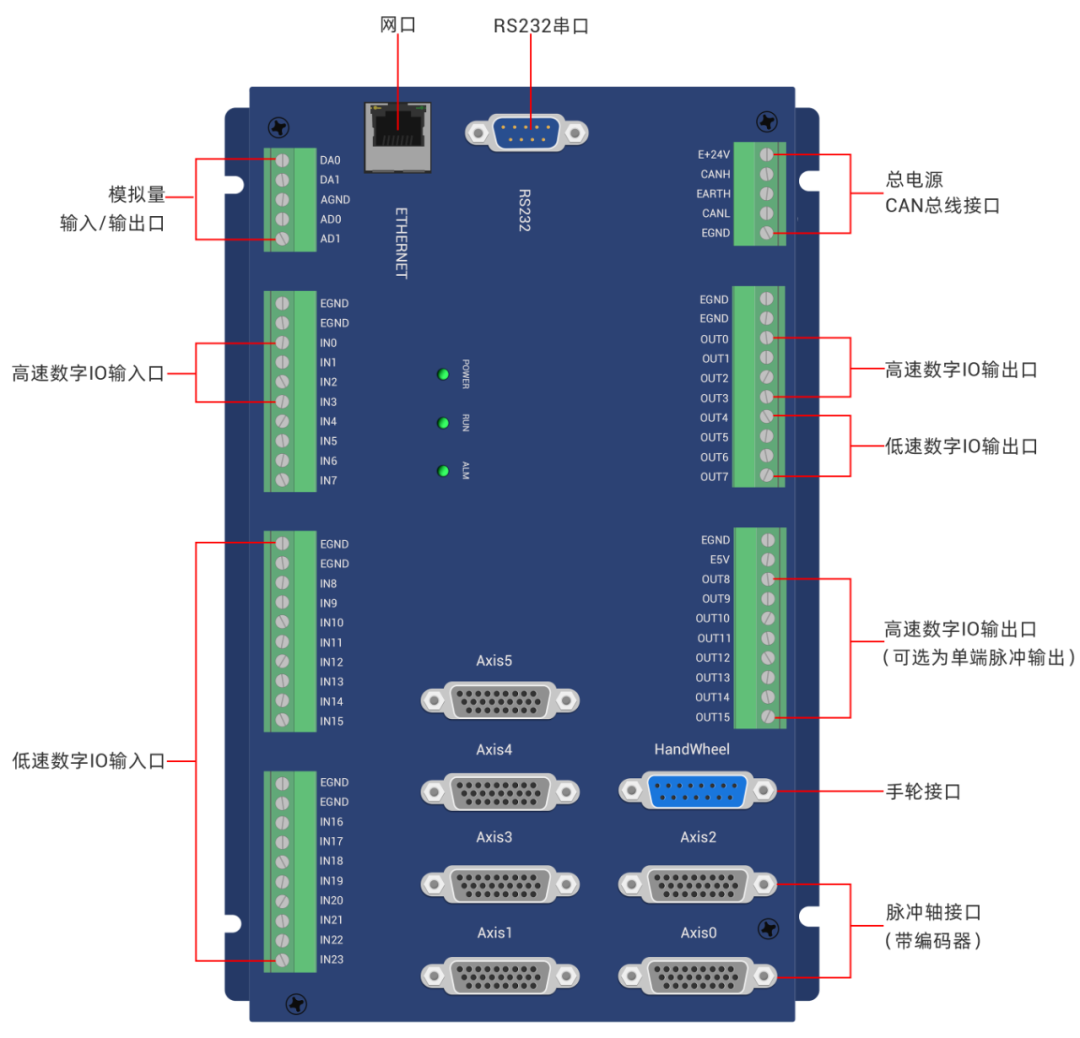
ECI2A18B控制卡最大可扩展至12脉冲轴,支持8路高速输入和4路高速输出,集成丰富的运动控制功能,包含多轴点位运动、电子凸轮,直线插补,圆弧插补,连续插补运动等,满足多样化的工业应用需求。
ECI2A18B硬件功能特性:
1.支持6路差分脉冲轴+4路单端脉冲轴运动控制;
2.支持1路专用的手轮输入接口;
3.差分脉冲轴最大输出脉冲频率10MHz;
4.标配24+12进16+6出,其中支持4路高速锁存,4路高速PWM,2路高速硬件比较输出PSO(可选支持HW2功能);
5.可支持RTSys+其他高级上位机编程语言的混合编程支持;
6.支持RTBasic多任务编程;
ECI2A18B视频介绍,点击→“【加量不加价】高性价比十轴脉冲运动控制卡ECI2A18B 让您的设备在自动化行业内卷中脱颖而出!”查看。
更多关于ECI2A18B的详情介绍,点击“【加量不加价】正运动网络型运动控制卡ECI2618B/ECI2A18B”查看。
使用LabVIEW进行项目开发
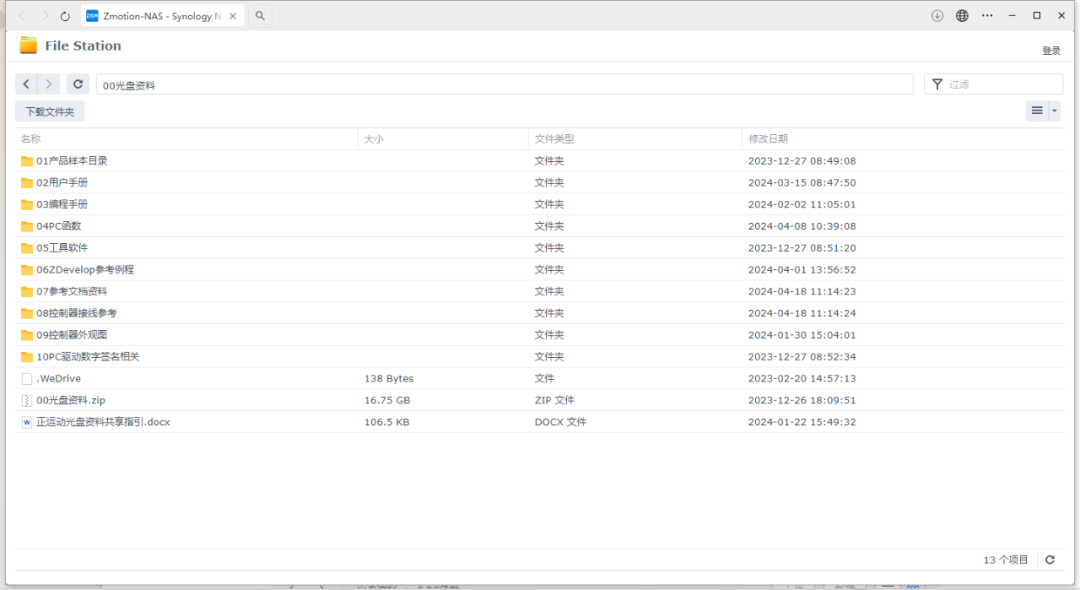
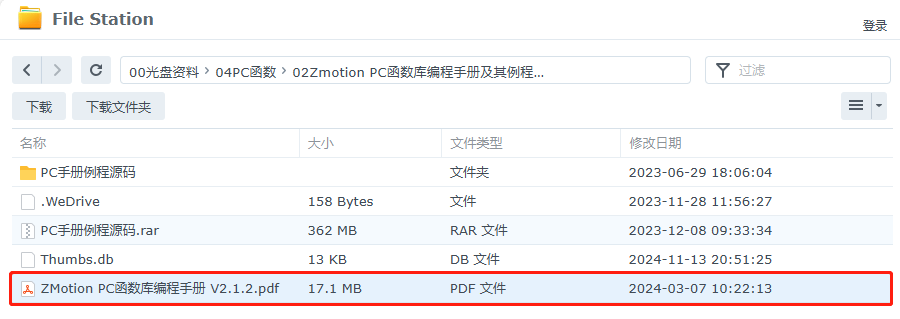
1.找到厂家提供的光盘资料里面的LabVIEW的VI库文件,路径如下。
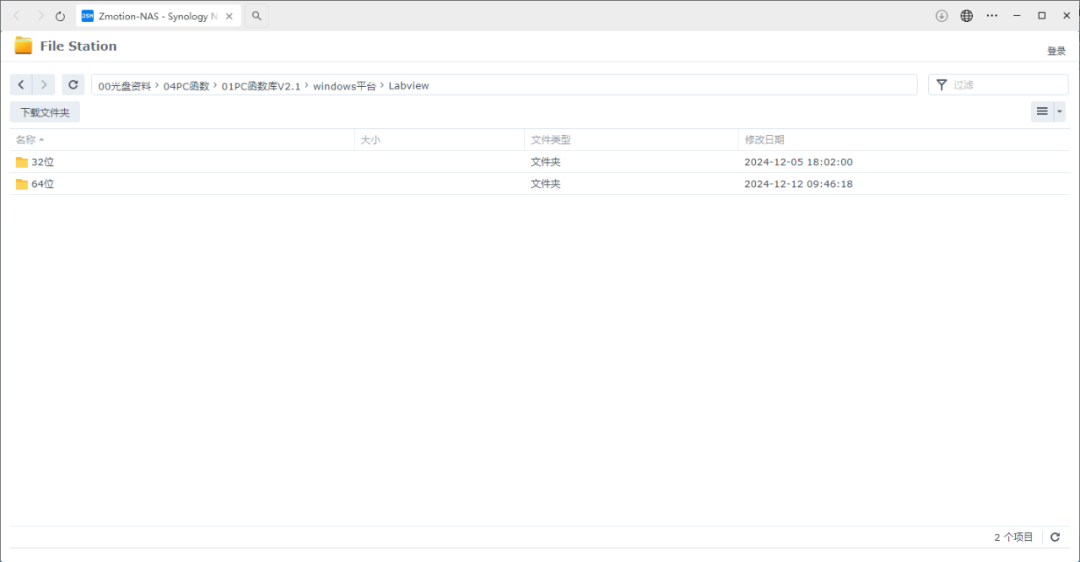
1)进入厂商提供的光盘资料找到“04PC函数”文件夹,并点击进入。
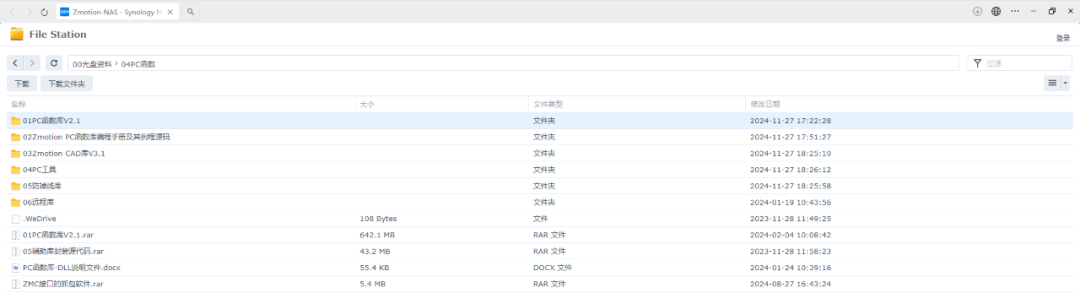
2)选择“01 PC函数库V2.1”文件夹。
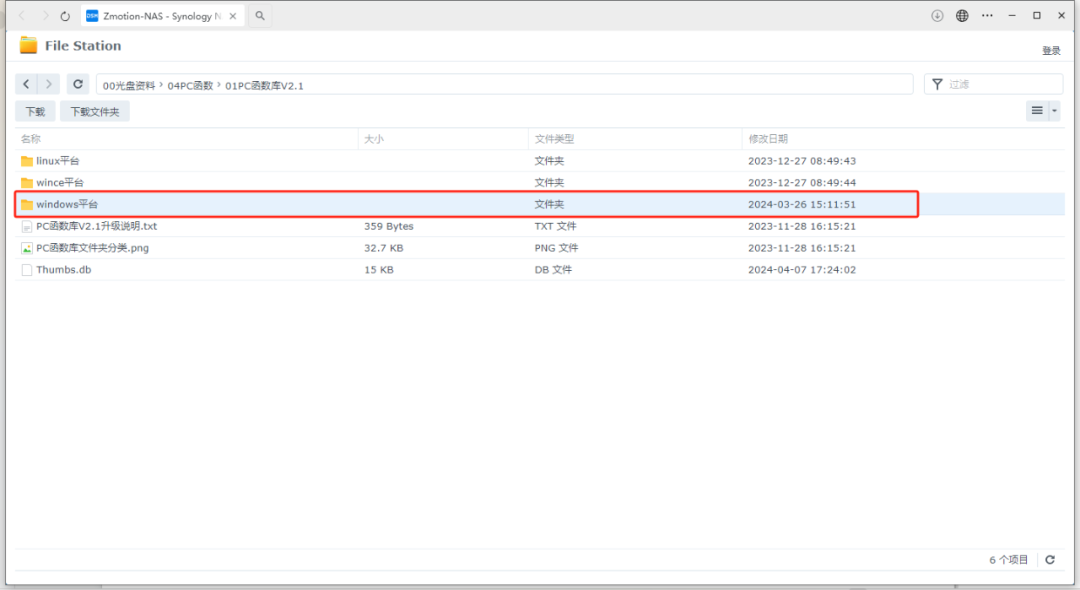
3)选择“windows平台”文件夹。
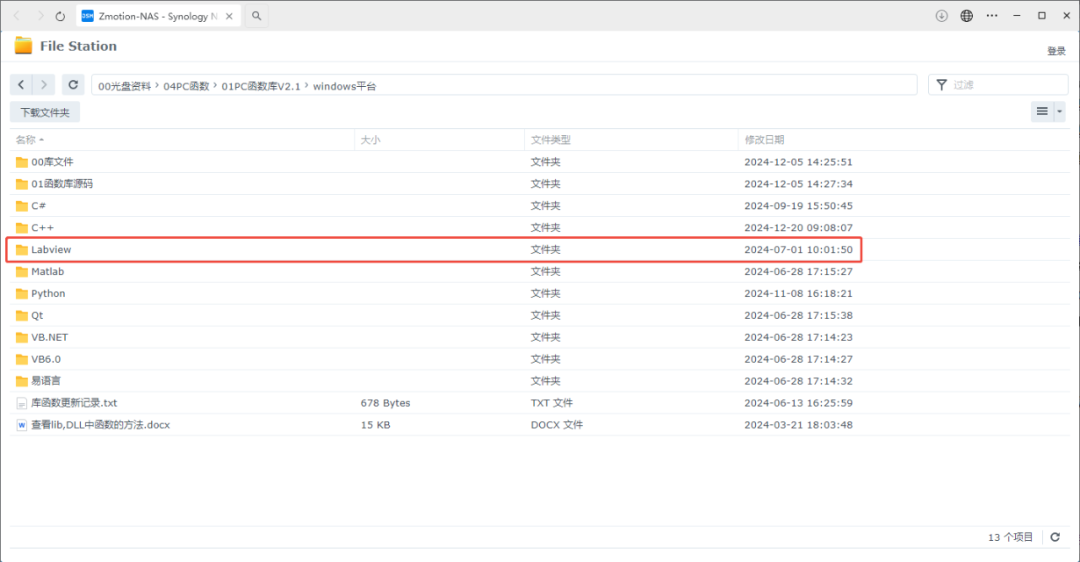
4)选择“Labview文件夹”,里面有32位和64位的动态库和例程。
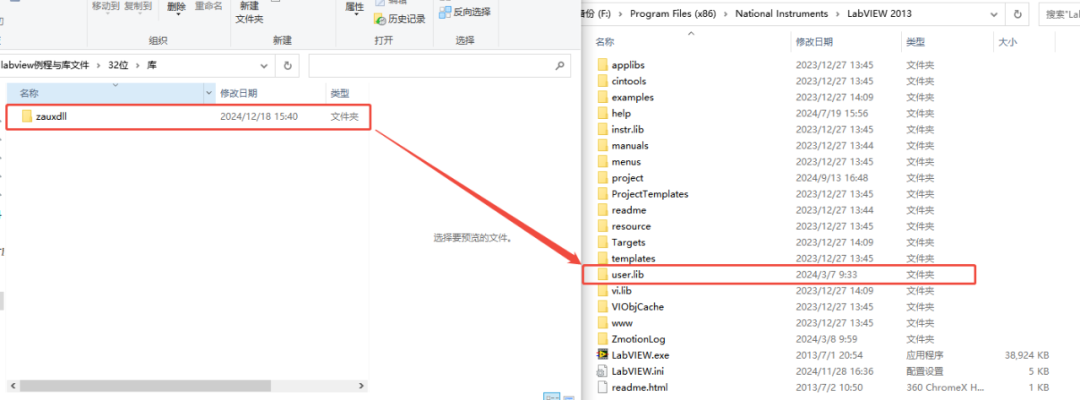
2.将厂商提供的LabVIEW的VI库文件复制到LabVIEW安装路径下LabVIEW/user.lib的文件夹内。
1)找到解压的VI库文件夹(zaudll是32位的VI库,64的VI库是newZauxDll64)。


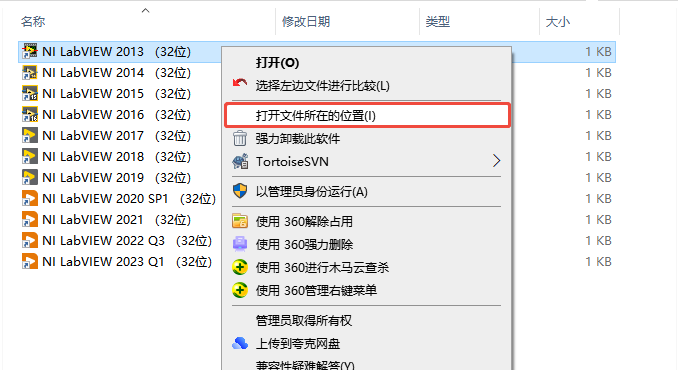
2)选中LabVIEW右击打开文件所在位置(这里以LabVIEW2013-32位为演示)。
3)将整个VI库文件夹直接复制放到user.lib该目录,然后关闭LabVIEW软件重新启动。
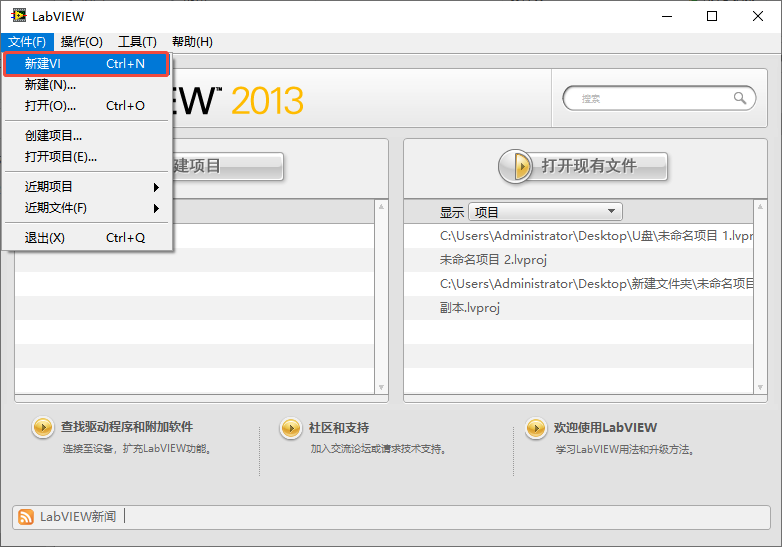
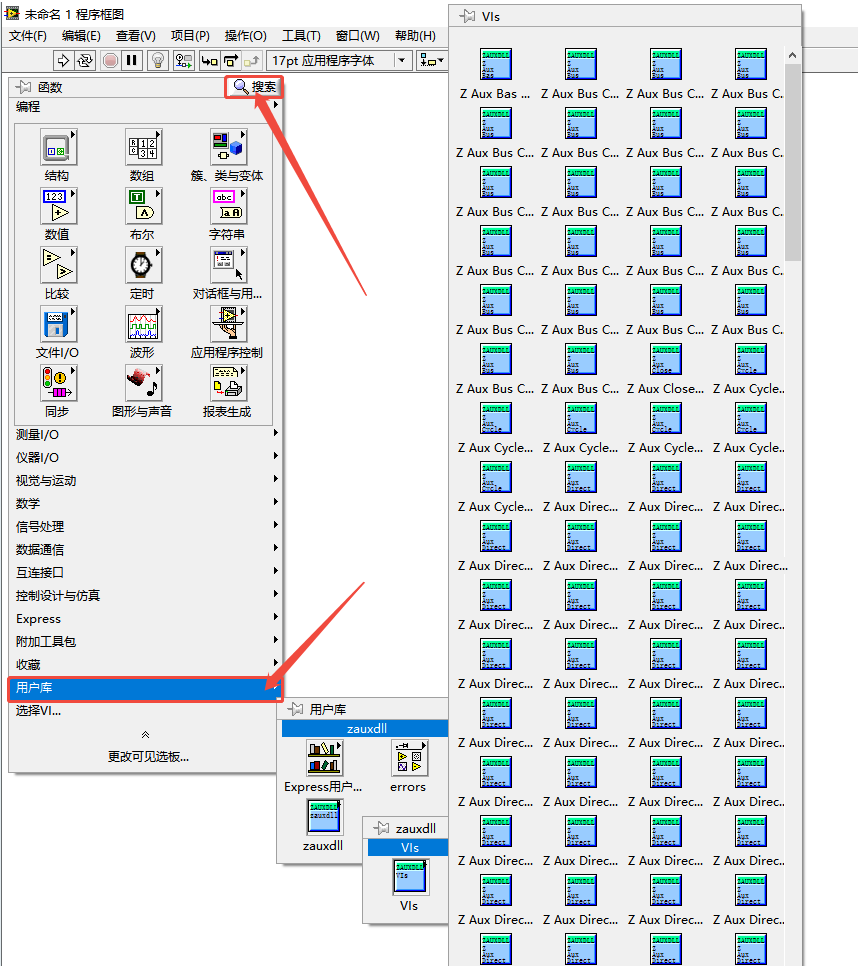
3.重新启动LabVIEW后,选择新建VI,然后右键点击VI程序框图空白处,选择用户库来找到添加的VI库,或者直接搜索VI,最后将需要的函数直接拖到面板上。
控制器连接
PC函数手册可在光盘资料查看,具体路径如下。
| 指令1 | ZAux_OpenCom | ||||||||
| 指令原型 | int32 __stdcall ZAux_OpenCom(uint32 comid,ZMC_HANDLE *phandle ) | ||||||||
| 指令说明 | 串口方式连接控制器。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 |
| ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 串口连接控制器 | ||||||||
| 详细说明 | 控制器提供多种方式连接,该指令为串口连接方式,较于网口连接,串口连接,通讯速率不高。 2.ZMC_HANDLE类型:Zmotion库中,专门用于控制卡连接数据定义类型; 3.控制器串口默认的参数
|
| 指令3 | ZAux_OpenEth | ||||
| 指令原型 | int32 __stdcall ZAux_OpenEth(char *ipaddr, ZMC_HANDLE * phandle) | ||||
| 指令说明 | 以太网连接控制器。 | ||||
| 输入参数 |
| ||||
| 输出参数 |
| ||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||
| 指令示例 | 网口连接控制器 | ||||
| 详细说明 | 1.网口采用RJ45标准网线接口,通讯速率为100Mbit/s。 2.控制器出厂的IP地址为192.168.0.11,端口号为502。对端通讯设备需与控制器处于同一网段,才可进行连接。 3.最常用的控制器连接方式。 4.ZMC_HANDLE类型:Zmotion库中,专门用于控制卡连接数据定义类型; |
| 指令11 | ZAux_FastOpen | ||||||||
| 指令原型 | int32 __stdcall ZAux_FastOpen(int type, char *pconnectstring, uint32 uims ,ZMC_HANDLE * phandle) | ||||||||
| 指令说明 | 与控制器建立连接, 可以指定连接的等待时间 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 |
| ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 串口连接: ZMC_HANDLE phandle;//控制器连接句柄 Char comID[32]= "Com0";//串口ID,不能直接写串口号,需要在串口号前加个Com ZAux_FastOpen(1, comID,1000 ,&phandle); 网口连接例子: ZMC_HANDLE phandle;//控制器连接句柄 Char EthID[32]= "192.168.0.11";//网口ID ZAux_FastOpen(2, EthID,1000 ,&phandle); PCI连接例子: ZMC_HANDLE phandle;//控制器连接句柄 ZAux_FastOpen(4, “PCI1”,1000 ,&phandle); MotionRT连接例子: ZMC_HANDLE phandle;//控制器连接句柄 ZAux_FastOpen(5, “LOCAL1”,1000 ,&phandle); | ||||||||
| 详细说明 | type设置为5,zmotion.dll版本要在3.8.8.50以上。 若type设置为5,字符串非LOACL+卡号,则自动默认为LOCAL1 |
| 指令4 | ZAux_OpenPci | ||||
| 指令原型 | int32 __stdcall ZAux_OpenPci(uint32 cardnum, ZMC_HANDLE *phandle) | ||||
| 指令说明 | 连接PCI卡。 | ||||
| 输入参数 |
| ||||
| 输出参数 |
| ||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||
| 指令示例 | PCI方式连接控制器 | ||||
| 详细说明 | 1.PCI连接,需要PCI类型的控制卡才可进行PCI连接,该类型连接通讯速率最高,但该连接需要工控机含有PCI卡槽接口。 2.ZMC_HANDLE 类型:Zmotion库中,专门用于控制卡连接数据定义类型; |
| 指令5 | ZAux_Close | ||||
| 指令原型 | int32 __stdcall ZAux_Close(ZMC_HANDLE handle) | ||||
| 指令说明 | 关闭控制器连接。 | ||||
| 输入参数 |
| ||||
| 输出参数 | / | ||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||
| 指令示例 | 串口连接控制器 | ||||
| 详细说明 | / |
要想通过上位机操控控制器,就必须先连接控制器,上位机连接控制器的接口有四种,分别是网口连接、串口连接、PCI和LOCAL连接。
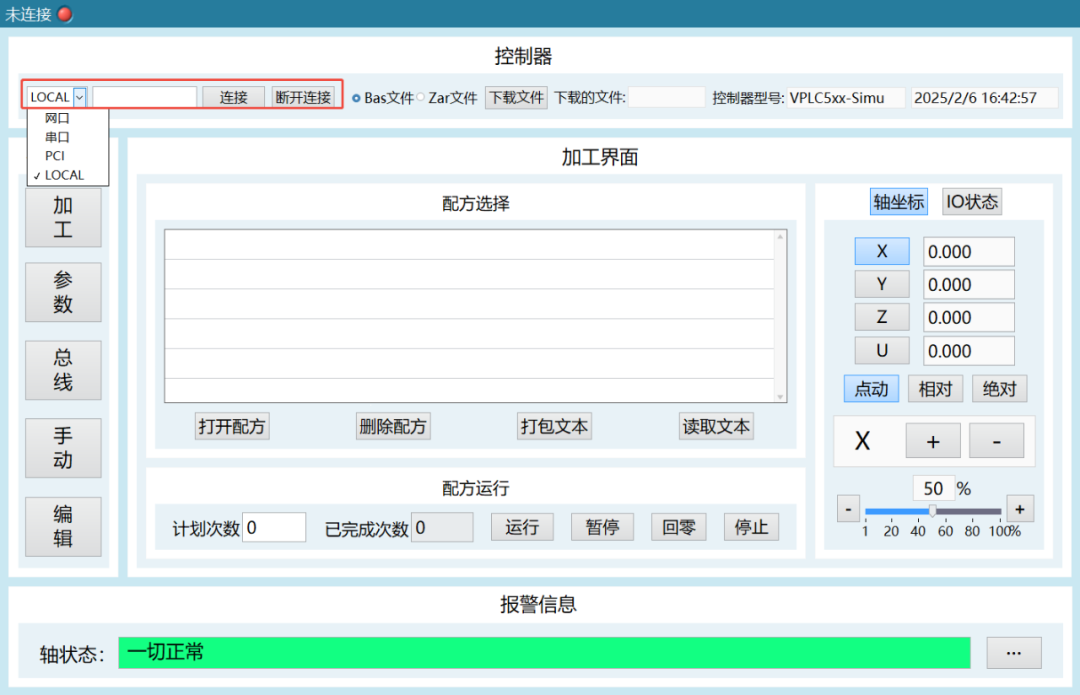
网口链接
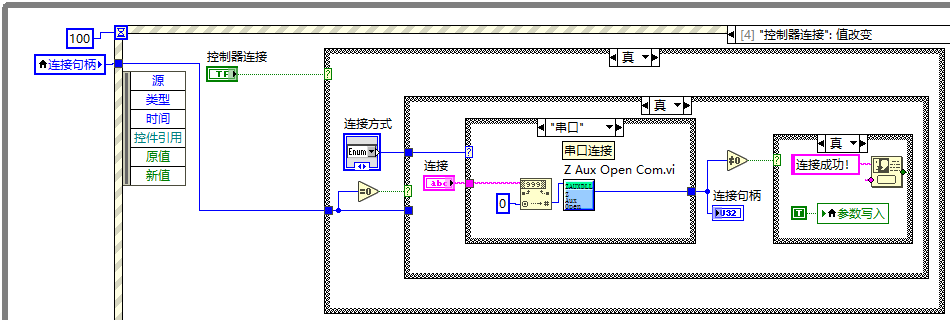
串口链接
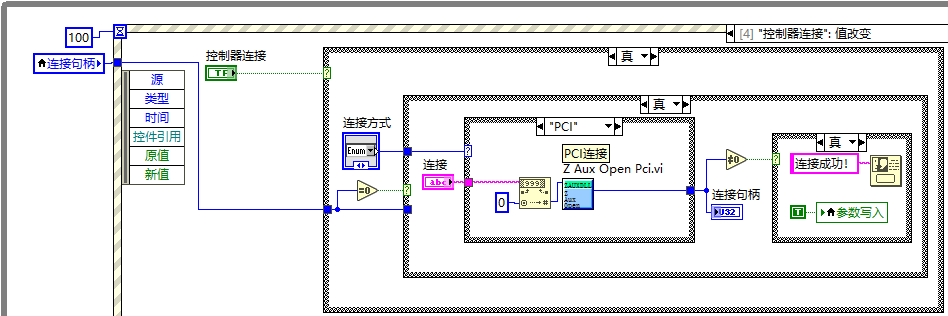
PCI链接
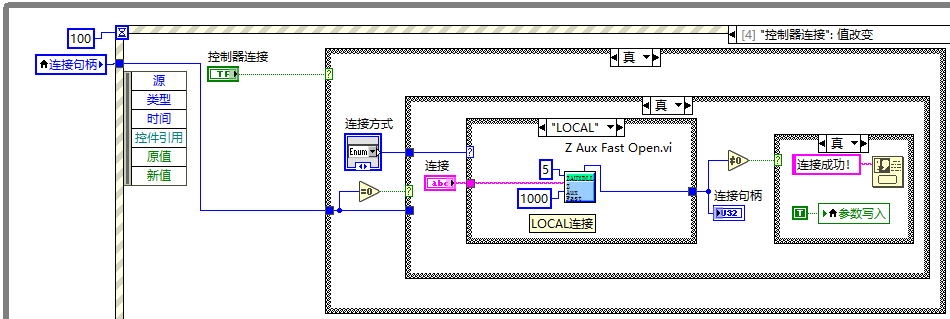
LOCAL链接
读取多个轴轴参数和控制器型号
相关PC函数介绍。
| 指令63 | ZAux_Direct_GetAllAxisPara | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_GetAllAxisPara(ZMC_HANDLE handle, const char *sParam,int imaxaxis,float *pfValue) | ||||||||
| 指令说明 | 一次性读取多个轴轴参数。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 |
| ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | float fAtype[8]; ZAux_Direct_GetAllAxisPara(handle,"ATYPE",8,fAtype); //获取0-7轴的轴类型 | ||||||||
| 详细说明 | / |
| 指令64 | ZAux_Direct_GetAllAxisInfo | ||||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_GetAllAxisInfo(ZMC_HANDLE handle,int imaxaxis,int *IdleStatus,float *DposStatus,float *MposStatus, int *AxisStatus) | ||||||||||
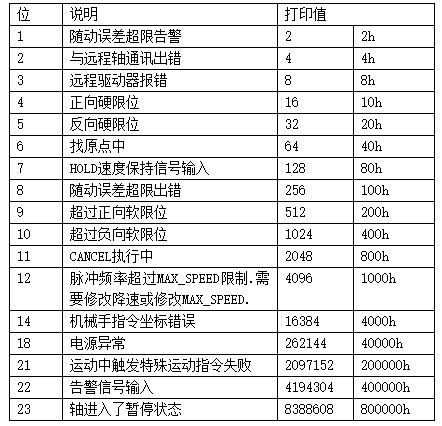
| 指令说明 | 读取多个轴基本轴状态。 按十进制显示数值,按二进制对应位判断状态。 | ||||||||||
| 输入参数 |
| ||||||||||
| 输出参数 |
| ||||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||||
| 指令示例 | int iIdle[8]; Float iDpos[8]; Float iMpos[8]; int iStatus[8]; ZAux_Direct_GetAllAxisPara(handle,,8,iIdle,iDpos,iMpos,iStatus); //获取0-7轴的轴基本轴状态 | ||||||||||
| 详细说明 | 轴状态,按位对应:
|
| 指令12 | ZAux_GetControllerInfo | ||||||||
| 指令原型 | int32 __stdcall ZAux_GetControllerInfo(ZMC_HANDLE handle ,char *SoftType ,char *SoftVersion ,char *ControllerId) | ||||||||
| 指令说明 | 读取控制器厂商信息。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 |
| ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 控制器信息 | ||||||||
| 详细说明 | / |
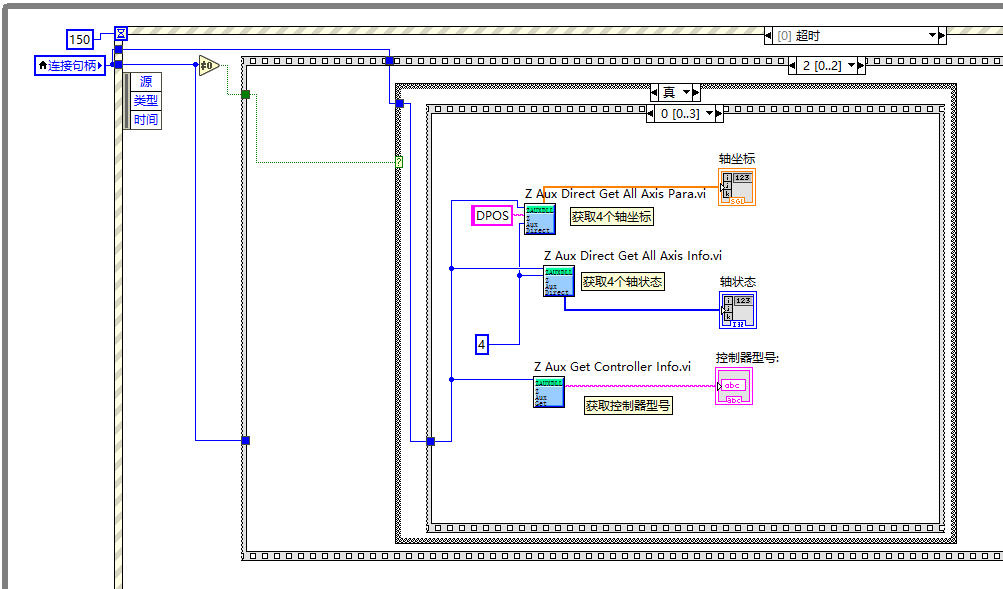
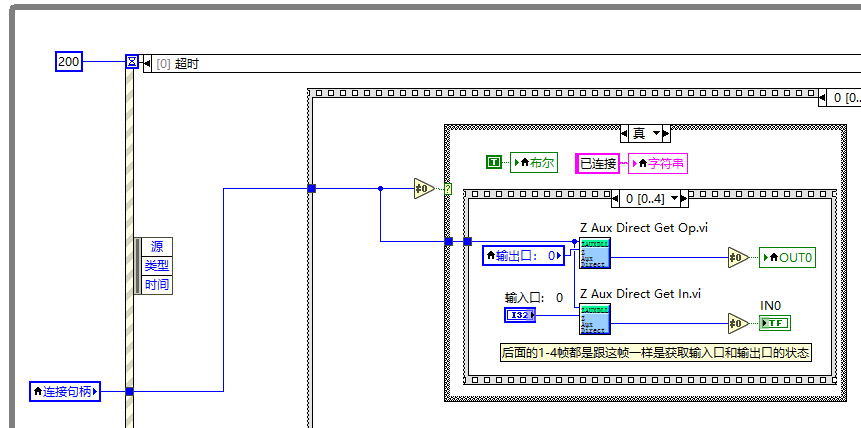
链接控制器后,通过定时获取轴坐标、轴状态和控制器型号。
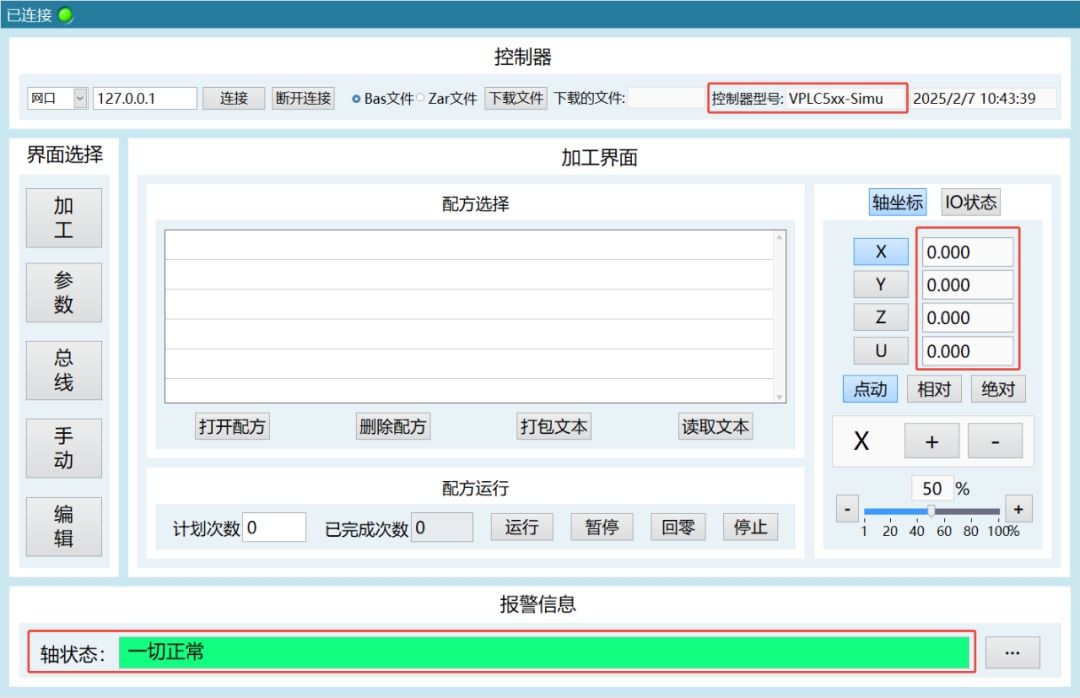


获取轴坐标、轴状态和控制器型号的程序框图。
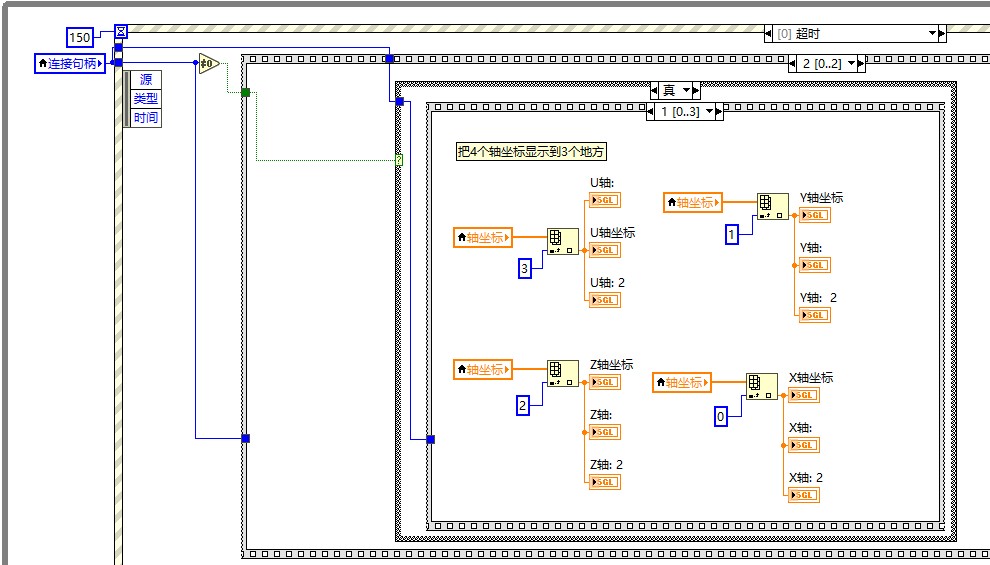
把轴坐标显示到界面上。
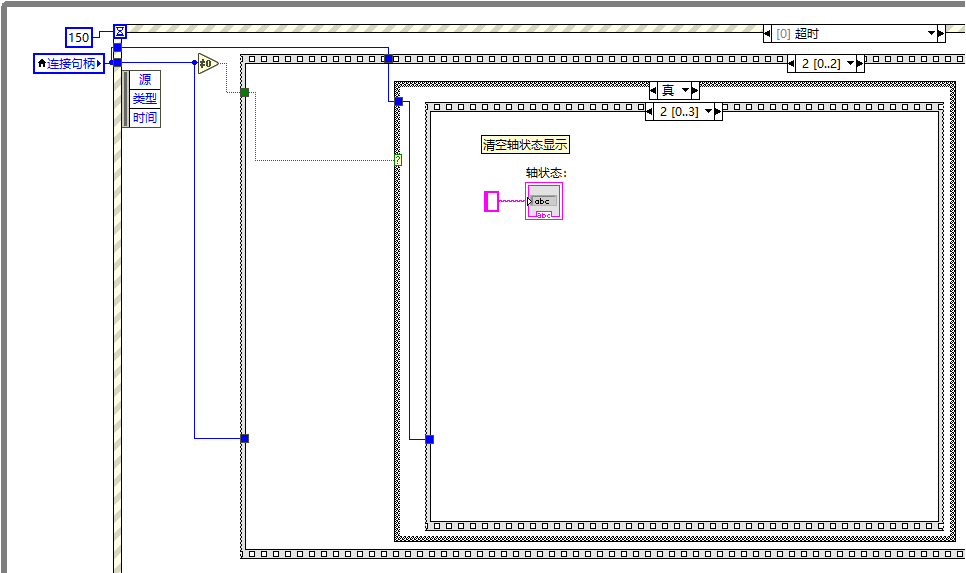
更新轴状态前,清空界面的轴状态显示。
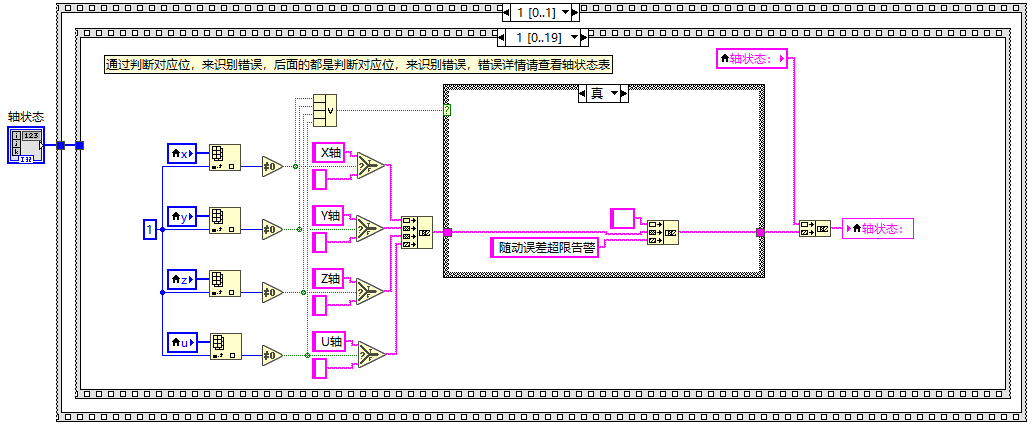
判断轴状态,轴状态有错误就处理错误信息并显示出来。
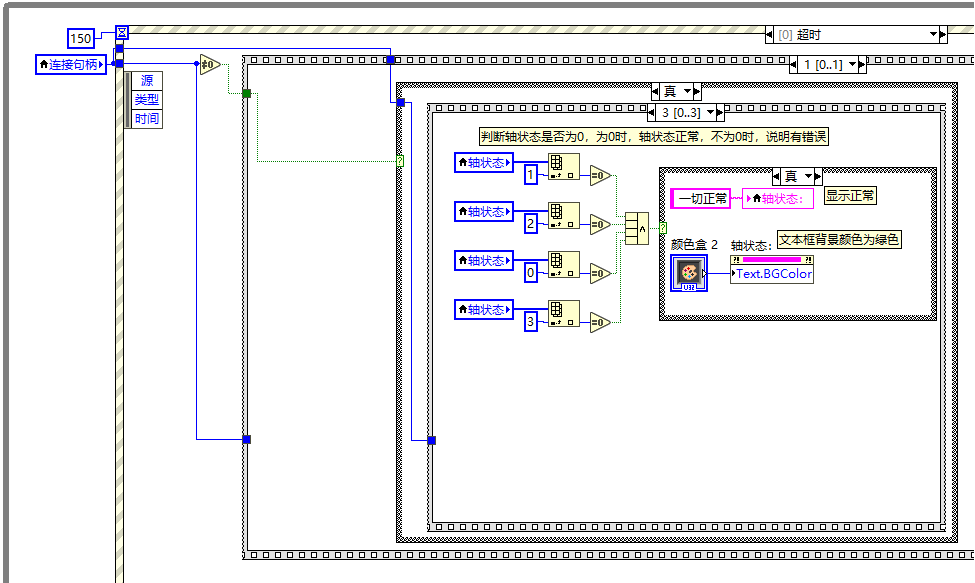
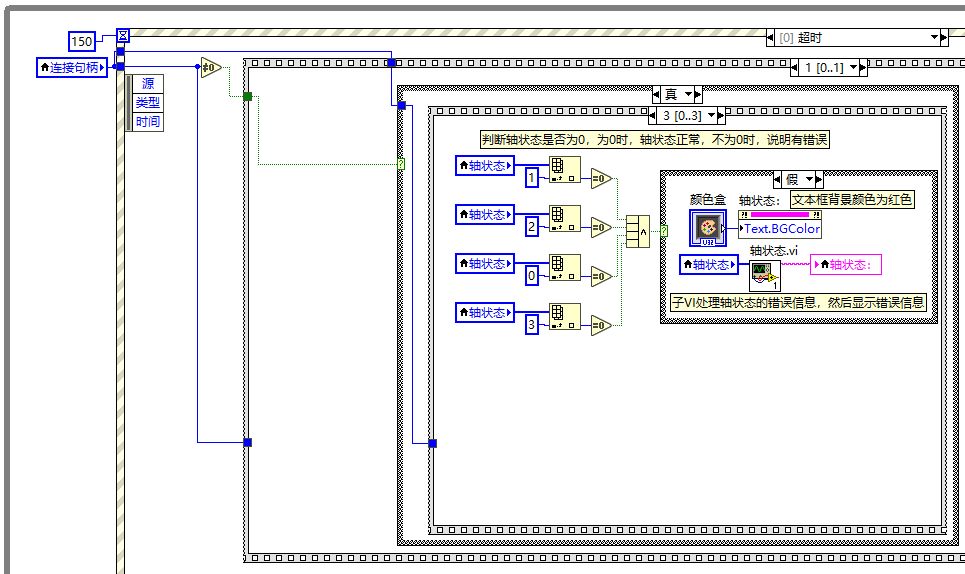
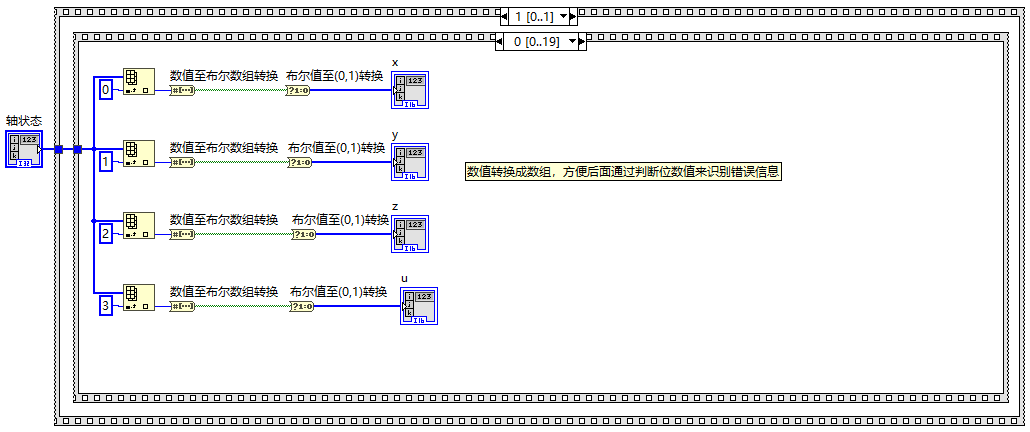
轴状态子VI把轴状态数值转换成数组,通过判断位数值来识别错误信息。

LabVIEW进行IO控制
相关PC函数介绍。
| 指令197 | ZAux_Direct_GetIn | ||||||
| 指令原型 | int32 __stdcall ZAux_Direct_GetIn(ZMC_HANDLE handle,int ionum,uint32 *piValue) | ||||||
| 指令说明 | 读取输入口状态, 参见软件手册里面的“IN”指令。 | ||||||
| 输入参数 |
| ||||||
| 输出参数 |
| ||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||
| 指令示例 | IO读取与设置 | ||||||
| 详细说明 | 1.若设置了翻转,读取的是INVERT_IN翻转以后的状态。 2.ZIO扩展板的IO通道号与拨码有关,起始值为(16 +拨码组合值*16),EIO总线扩展IO使用NODE_IO指令,只能设置为8的倍数,详细查看硬件手册。 注意:IO映射编号要大于控制器自身最大的IO编号,不能与控制器的编号重合。 |
| 指令198 | ZAux_Direct_SetOp | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetOp(ZMC_HANDLE handle, int ionum,uint32 iValue); | ||||||||
| 指令说明 | 打开输出口,参见软件手册里面的“OP”指令。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | IO读取与设置 | ||||||||
| 详细说明 | ZIO扩展板的IO通道号与拨码有关,起始值为(16 +拨码组合值*16),EIO总线扩展IO使用NODE_IO指令,只能设置为8的倍数,详细查看硬件手册。 注意IO映射编号要大于控制器自身最大的IO编号,不能与控制器的编号重合。 |
| 指令199 | ZAux_Direct_GetOp | ||||||
| 指令原型 | int32 __stdcall ZAux_Direct_GetOp(ZMC_HANDLE handle, int ionum, uint32 *piValue); | ||||||
| 指令说明 | 读取输出口,参见软件手册里面的“OP”指令。 | ||||||
| 输入参数 |
| ||||||
| 输出参数 |
| ||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||
| 指令示例 | IO读取与设置 | ||||||
| *piValue | 返回状态值 | ||||||
| 详细说明 | ZIO扩展板的IO通道号与拨码有关,起始值为(16 +拨码组合值*16),EIO总线扩展IO使用NODE_IO指令,只能设置为8的倍数,详细查看硬件手册。 注意IO映射编号要大于控制器自身最大的IO编号,不能与控制器的编号重合。 最多可操作32个输出口。 |
输入输出口的监测与控制。

(1)定时获取输出口和输入口状态的程序框图。
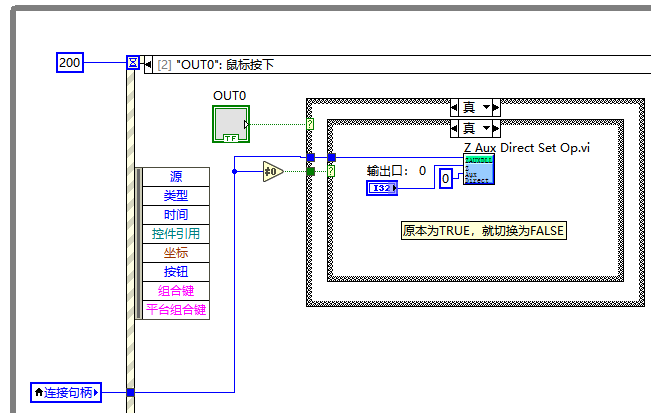
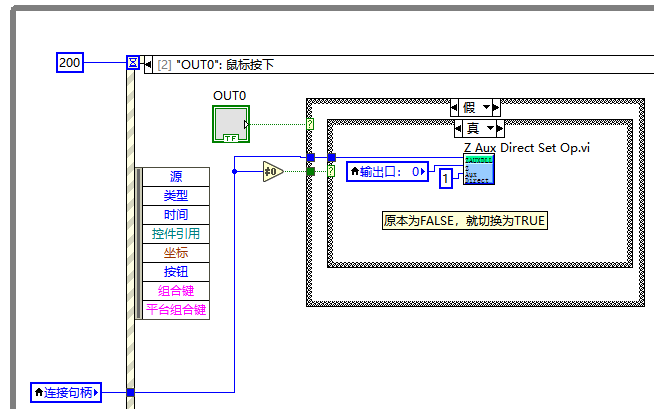
(2)切换输出口状态的程序框图。
LabVIEW进行Basic下载
相关PC函数介绍。
| 指令268 | ZAux_BasDown | ||||||||
| 指令原型 | int32 __stdcall ZAux_BasDown(ZMC_HANDLE handle,const char *Filename,uint32 run_mode ) | ||||||||
| 指令说明 | 单个.bas文件生成ZAR并且下载到控制器运行 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 控制程序的下载及编写 | ||||||||
| 详细说明 | .bas文件,可在正运动控制卡直接运行的Basic语法文件 |
| 指令269 | ZAux_ZarDown | ||||||||
| 指令原型 | int32 __stdcall ZAux_ZarDown(ZMC_HANDLE handle,const char *Filename,uint32 run_mode) | ||||||||
| 指令说明 | 下载ZAR程序到控制器运行 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | / | ||||||||
| 详细说明 | Zar文件,正运动控制卡直接运行的程序,经过加密后生成的文件 |
把Bas/Zar文件下载到控制器。
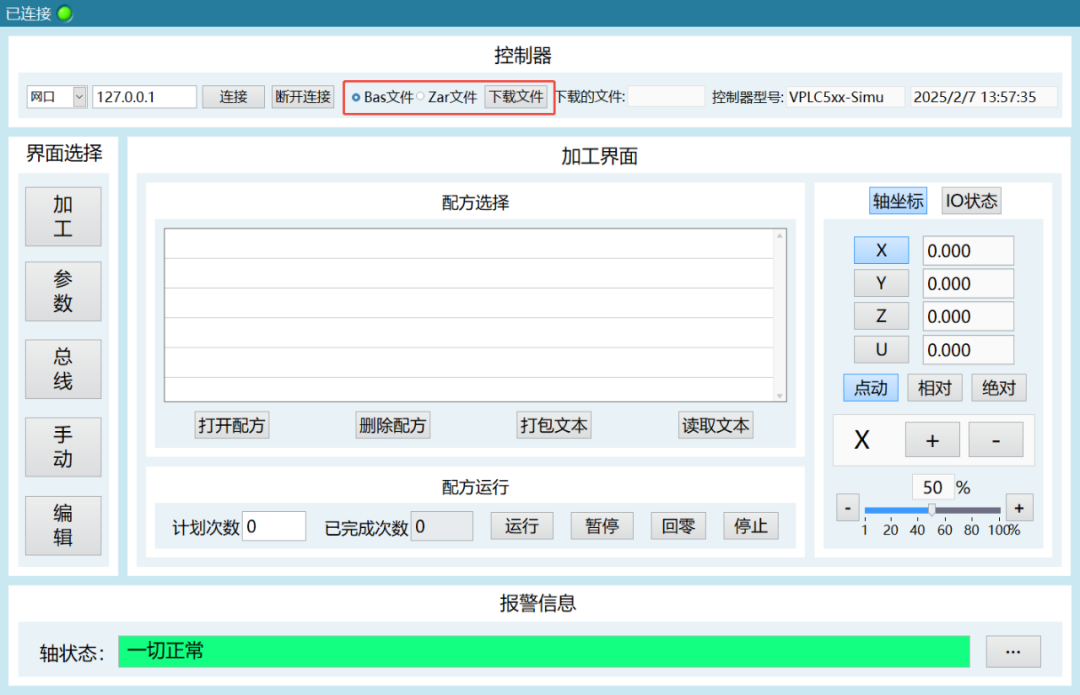
点击下载文件,会根据选择文件的类型选项进行弹窗,然后就可以选择要下载的文件。
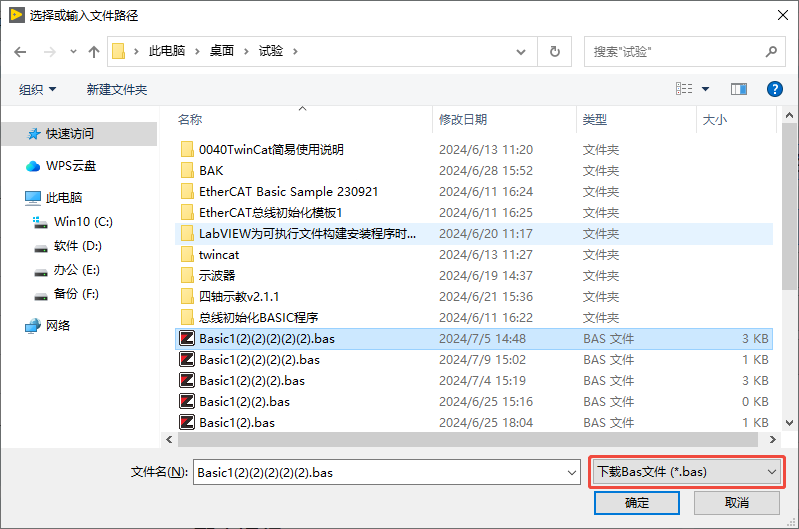
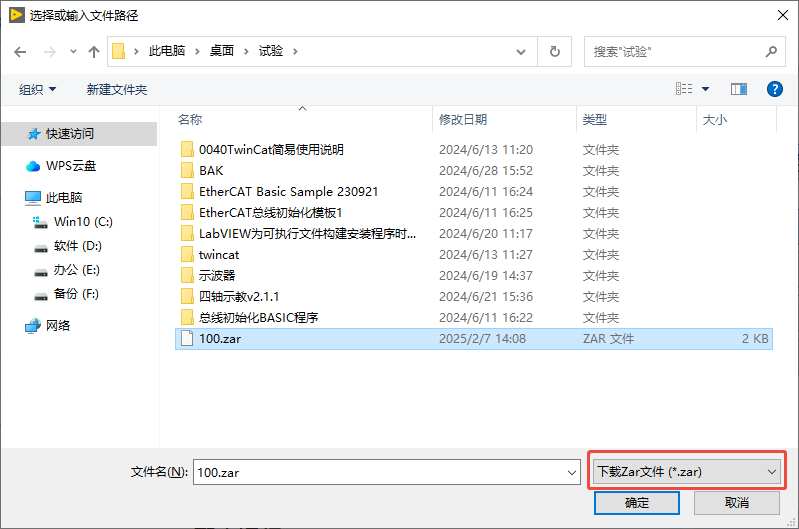
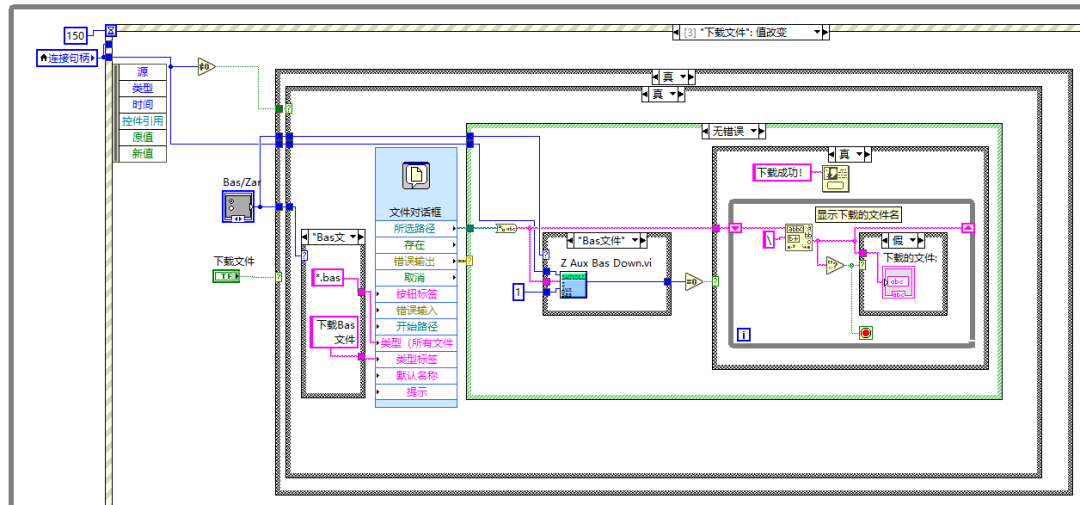
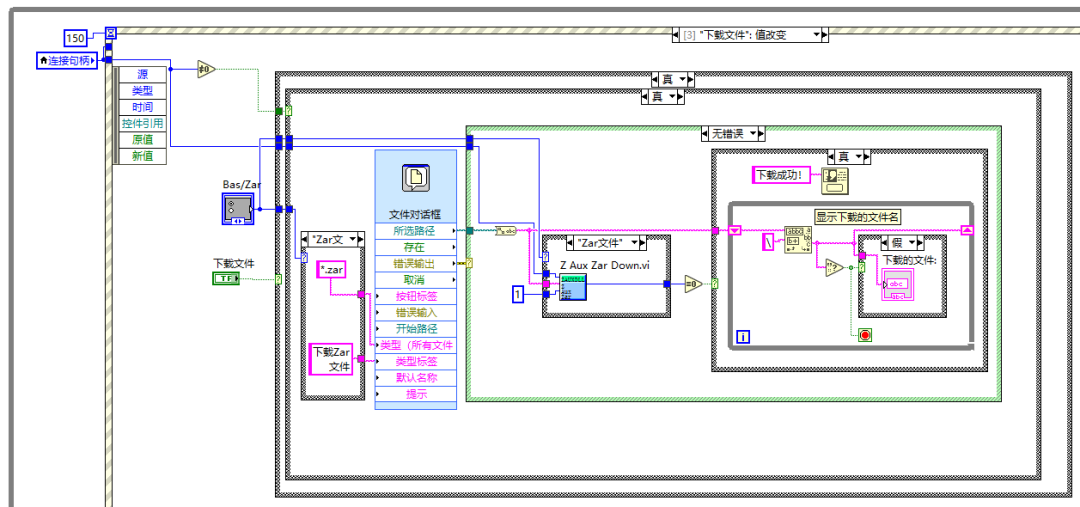
选择Bas/Zar文件下载到控制器的程序框图。
LabVIEW进行轴参数设置
1.相关PC函数介绍
| 指令16 | ZAux_Direct_SetAtype | ||||||||||||||||||||||||||||||||||||||||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetAtype(ZMC_HANDLE handle, int iaxis, int iValue) | ||||||||||||||||||||||||||||||||||||||||||||||
| 指令说明 | 设置指定轴的轴类型。 | ||||||||||||||||||||||||||||||||||||||||||||||
| 输入参数 |
| ||||||||||||||||||||||||||||||||||||||||||||||
| 输出参数 | / | ||||||||||||||||||||||||||||||||||||||||||||||
| 返回值 | 详见错误码说明。 | ||||||||||||||||||||||||||||||||||||||||||||||
| 指令示例 | 轴基本运动参数设置获取 | ||||||||||||||||||||||||||||||||||||||||||||||
| 详细说明1 | 1.最好是在程序初始化的时候就设置好ATYPE。 2.ZCAN扩展轴要先设置AXIS_ADDRESS,并在设置后延迟2个任务周期再调用运动指令,受总线带宽限制,ZCAN扩展轴不要设置超过2个。 3.对部分产品型号带有独立的编码器,可以使用相应虚拟轴来做编码器轴使用,例如ZMC206的电机轴为0-5轴,编码器可以通过轴6-11来控制,详细可通过ZDevelop软件连接上控制器以后查看控制器状态。 | ||||||||||||||||||||||||||||||||||||||||||||||
| 详细说明2 |
|
| 指令18 | ZAux_Direct_SetUnits | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetUnits(ZMC_HANDLE handle,int iaxis, float fValue) | ||||||||
| 指令说明 | 设置脉冲当量,当设置为1时,表示单位为1个脉冲。 脉冲当量,控制器基本单位。指定每单位发送的脉冲数,支持5位小数精度。 控制器以脉冲当量作为基本单位,修改后坐标显示会随脉冲当量改变比例变化。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 轴基本运动参数设置获取 | ||||||||
| 详细说明 | 如何设置 假设电机U=3600脉冲转一圈,丝杠一圈螺距P=2mm: 电机转1°对应的脉冲当量UNITS: UNITS=U/360=3600/360=10;//此时MOVE(1),电机转1° 工作台走1mm对应的脉冲当量UNTIS: UNITS=U/P=3600/2=1800,//此时MOVE(1),工作台走1mm 机台存在减速比时,要把减速比算上,假设减速比i=2:1 UNITS=U*i/P=3600*2/2=3600 |
| 指令33 | ZAux_Direct_SetLspeed | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetLspeed(ZMC_HANDLE handle, int iaxis, float fValue) | ||||||||
| 指令说明 | 设置起始速度,单位units/s。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 轴基本参数的设置获取(带起始速度与S曲线) | ||||||||
| 详细说明 | 1.当多轴运动时,设置主轴作为插补运动的起始速度。 2.当需要追求效率时,可以考虑设置起始速度。 |
| 指令24 | ZAux_Direct_SetSpeed | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetSpeed(ZMC_HANDLE handle,int iaxis, float fValue) | ||||||||
| 指令说明 | 设置轴速度,单位units/s。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 轴基本运动参数设置获取 | ||||||||
| 详细说明 | 1.当多轴运动时,插补运动的速度设置主轴速度,作为插补运动的速度。(主轴:轴列表数组里第0个数据所指定的轴号) 2.速度修改后,立刻生效,可以实现动态变速,但是改变瞬间会抖。希望平滑变速请使用SPEED_RATIO(zbasic指令,PC可以用这个函数: ZAux_Direct_SetParam(句柄, “SPEED_RATIO”,轴号, 当前速度的比例))来代替掉速度函数,让他在线变速变得相对平滑。 |
| 指令20 | ZAux_Direct_SetAccel | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetAccel(ZMC_HANDLE handle,int iaxis, float fValue) | ||||||||
| 指令说明 | 设置加速度。单位为units/s/s。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 轴基本运动参数设置获取 | ||||||||
| 详细说明 | 1.当多轴运动时,插补运动的加速度设置主轴加速度。 (主轴:轴列表数组里第0个数据所指定的轴号) 2.建议运动前设置好加速度和减速度,运动中不要修改,运动中调整会导致速度曲线变化。 |
| 指令22 | ZAux_Direct_SetDecel | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetDecel(ZMC_HANDLE handle,int iaxis, float fValue) | ||||||||
| 指令说明 | 设置减速度,单位units/s/s。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 轴基本运动参数设置获取 | ||||||||
| 详细说明 | 当多轴运动时,插补运动的加速度设置主轴减速度。 (主轴:轴列表数组里第0个数据所指定的轴号) 建议运动前设置好加速度和减速度,运动中不要修改,运动中调整会导致速度曲线变化。 当设置为0时,自动等于加速度ACCEL值,进行对称的加减速。 |
| 指令35 | ZAux_Direct_SetSramp | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetSramp(ZMC_HANDLE handle, int iaxis, float fValue) | ||||||||
| 指令说明 | 设置S曲线时间,单位ms,0时则表示梯形加减速。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 轴基本参数的设置获取(带起始速度与S曲线) | ||||||||
| 详细说明 | 设置后加减速过程会延长相应的时间 设置最大值为原来T型加速度的加速时间。 |
| 指令214 | ZAux_Direct_SetFsLimit | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetFsLimit(ZMC_HANDLE handle, int iaxis, float fValue) | ||||||||
| 指令说明 | 设置轴正向软限位,取消软限位时设置一个较大的值即可。单位units。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 正负软限位设置 | ||||||||
| 详细说明 | 当FS_LIMIT大于REP_DIST时,参数不起作用,正向软限位被禁止。 取消软限位时,建议不要去修改REP_DIST的值,将FS_LIMIT设置一个较大值即可。FS_LIMIT的值默认为200000000。 软限位无法作为DATUM回零时的限位信号参考。 注:设置限位前需检查有无设置对应的加减速度,以及快减减速度,若无设置,碰到限位无法停止 |
| 指令216 | ZAux_Direct_SetRsLimit | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetRsLimit(ZMC_HANDLE handle, int iaxis, float fValue) | ||||||||
| 指令说明 | 设置轴负向软限位,取消软限位时设置一个较大的值即可。单位units。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 正负软限位设置 | ||||||||
| 详细说明 | 当RS_LIMIT大于REP_DIST时,参数不起作用,负向软限位被禁止。 取消软限位时,建议不要去修改REP_DIST的值,将RS_LIMIT设置一个较大值即可。RS_LIMIT的值默认为-200000000。 软限位无法作为DATUM回零时的限位信号参考。 注:设置限位前需检查有无设置对应的加减速度,以及快减减速度,若无设置,碰到限位无法停止 |
| 指令113 | ZAux_Direct_SetDatumIn | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetDatumIn(ZMC_HANDLE handle, int iaxis , int iValue) | ||||||||
| 指令说明 | 设置轴映射原点IN,-1表示取消。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 单轴回零运动 | ||||||||
| 详细说明 | 设置了原点开关后,ZMC控制器输入OFF时认为有信号输入,要相反效果可以用INVERT_IN反转电平。(ECI系列控制器相反)。 |
| 指令218 | ZAux_Direct_SetFwdIn | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetFwdIn(ZMC_HANDLE handle, int iaxis,int iValue) | ||||||||
| 指令说明 | 设置正向限位信号,-1表示取消,参见软件手册里面的“FWD_IN”指令。注:设置限位前需检查有无设置对应的加减速度,以及快减减速度,若无设置,碰到限位无法停止 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 正负硬限位设置 | ||||||||
| 详细说明 | 1设置限位前需检查有无设置对应的加减速度,以及快减减速度,若无设置,碰到限位无法停止 2输入OFF时,认为有信号输入,要相反效果可以用INVERT_IN反转电平(ECI系列控制器相反)。 3正负限位切记勿要设置反,否则碰到限位还是会继续运动。 |
| 指令220 | ZAux_Direct_SetRevIn | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetRevIn(ZMC_HANDLE handle, int iaxis,int iValue); | ||||||||
| 指令说明 | 设置负向限位信号,-1表示取消,参见软件手册里面的“REV_IN”指令。注:设置限位前需检查有无设置对应的加减速度,以及快减减速度,若无设置,碰到限位无法停止 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 正负硬限位设置 | ||||||||
| 详细说明 | 1设置限位前需检查有无设置对应的加减速度,以及快减减速度,若无设置,碰到限位无法停止 2输入OFF时,认为有信号输入,要相反效果可以用INVERT_IN反转电平(ECI系列控制器相反)。 3正负限位切记勿要设置反,否则碰到限位还是会继续运动。 |
| 指令222 | ZAux_Direct_SetAlmIn | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetAlmIn(ZMC_HANDLE handle, int iaxis,int iValue) | ||||||||
| 指令说明 | 设置轴报警信号,-1表示取消,参见软件手册里面的“ALM_IN”指令。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 告警IN设置 | ||||||||
| 详细说明 | 1设置轴报警信号前需检查有无设置对应的加减速度,以及快减减速度,若无设置,碰到限位无法停止 2输入OFF时,认为有信号输入,要相反效果可以用INVERT_IN反转电平(ECI系列控制器相反)。 |
| 指令205 | ZAux_Direct_SetInvertIn | ||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_SetInvertIn(ZMC_HANDLE handle, int ionum, int bifInvert) | ||||||||
| 指令说明 | 设置反转输入状态,参见软件手册里面的“ INVERT_IN”指令。 | ||||||||
| 输入参数 |
| ||||||||
| 输出参数 | / | ||||||||
| 返回值 | 成功返回值为0,非0详见错误码说明。 | ||||||||
| 指令示例 | 正负硬限位设置 | ||||||||
| 详细说明 | ZMC系列控制器输入OFF时认为有信号输入(ECI系列控制器与之相反) |
2.轴参数设置界面

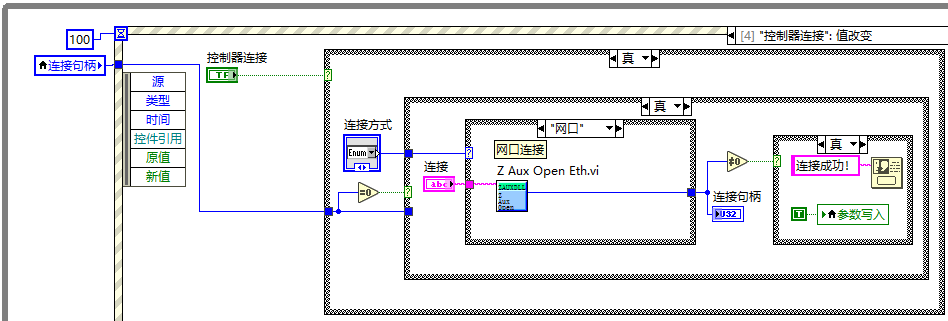
(1)成功连接控制器后,还使能参数写入布尔,然后超时事件根据进行一次轴参数初始化设置。
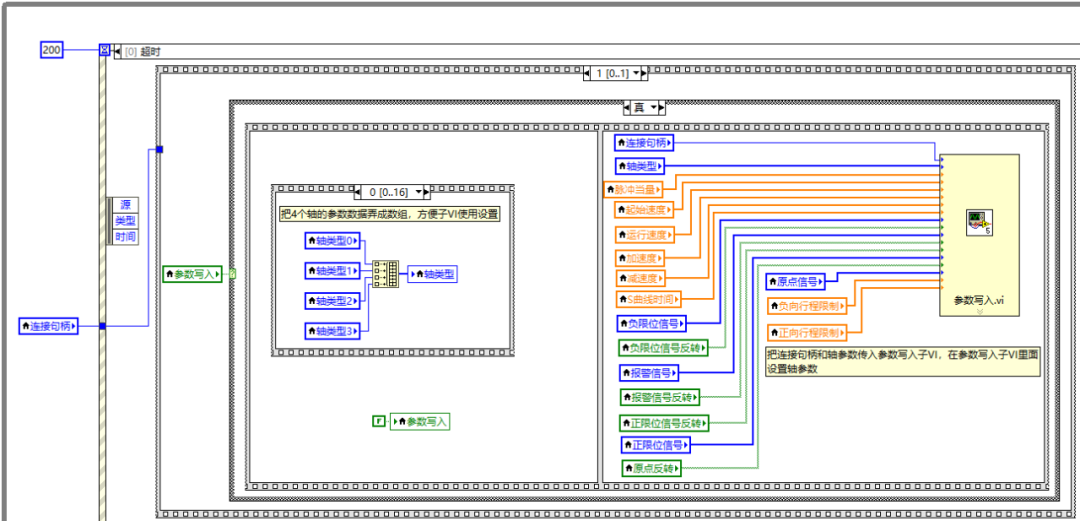
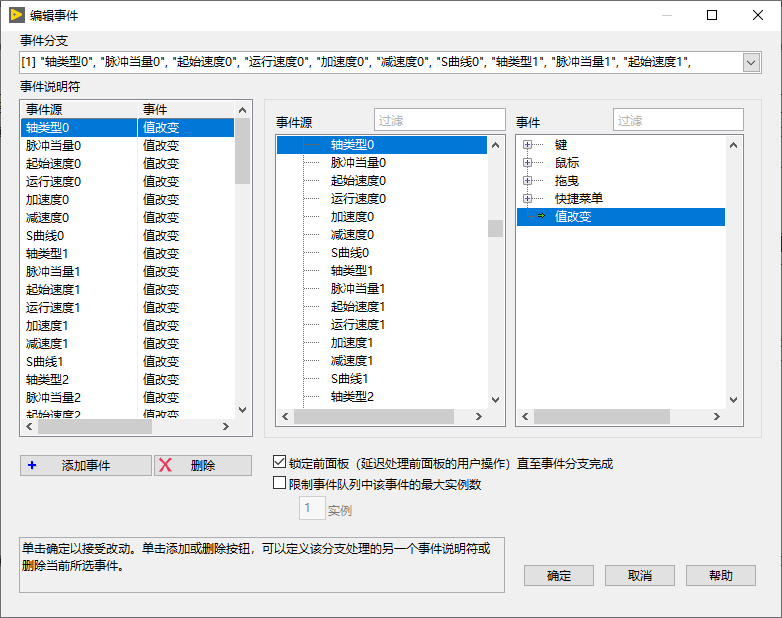
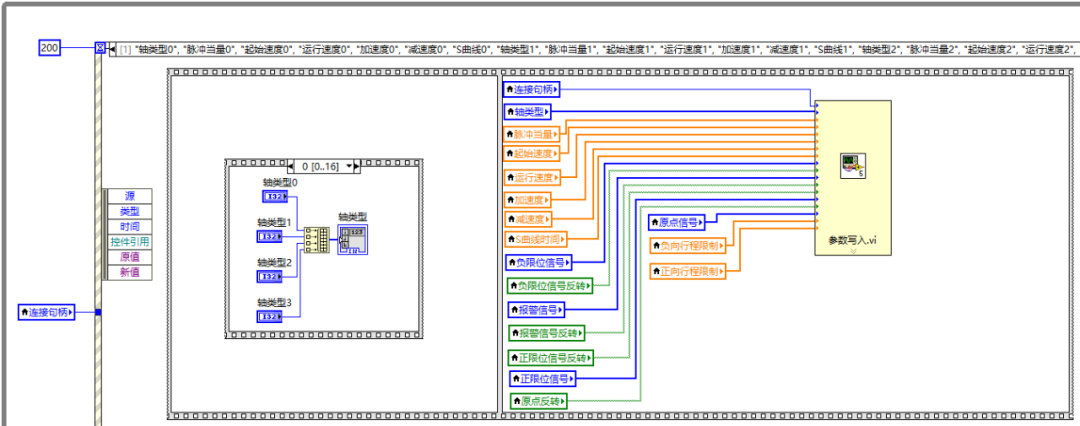
(2)在参数界面修改轴参数数值,会自动设置轴参数。
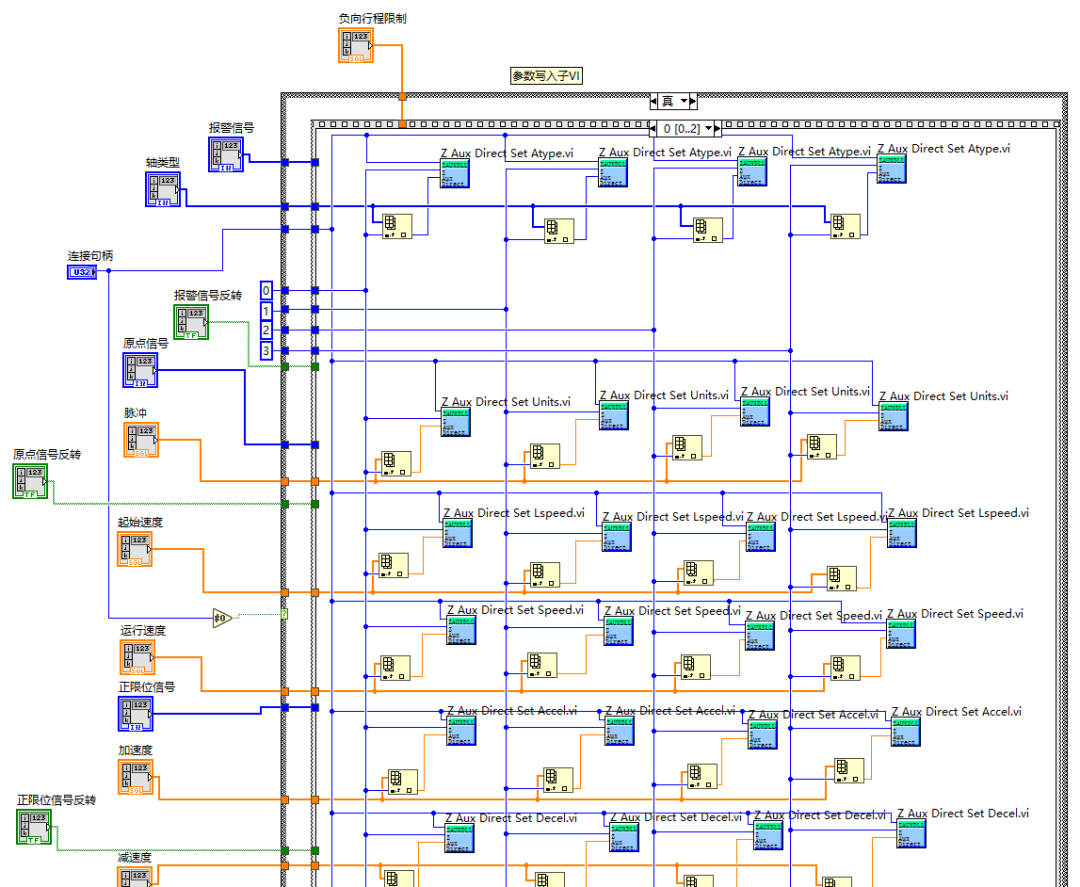
(3)参数写入子VI。
3.教学视频可点击→“LabVIEW运动控制(二):EtherCAT运动控制器的多轴示教加工应用(上)_”查看。
完整代码获取地址
▼

本次,正运动技术LabVIEW运动控制(二):EtherCAT运动控制器的多轴示教加工应用(上),就分享到这里。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











