







航位推算(Dead Reckoning,DR)
结合严老师教材7.4.1航位推算算法学习工具箱内test_DR.m,代码如下。
glvs
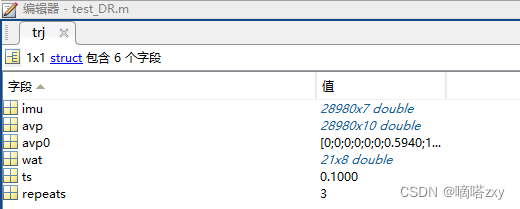
trj = trjfile('trj10ms.mat');
[nn, ts, nts] = nnts(2, trj.ts);
inst = [3;60;10]*glv.min; kod = 1; qe = 0; dT = 0; % od parameters
trjod = odsimu(trj, inst, kod, qe, dT, 0);
imuerr = imuerrset(0.01, 50, 0.001, 5);
imu = imuadderr(trjod.imu, imuerr);
davp = avperrset([60;0;60], 0, 0);
dinst = [15;0;10]*glv.min; dkod = 0.05;
dr = drinit(avpadderr(trjod.avp0,davp), inst+dinst, kod*(1+dkod), ts); % DR init
len = length(imu); avp = prealloc(fix(len/nn), 10);
ki = timebar(nn, len, 'DR simulation.');
for k=1:nn:len-nn+1
k1 = k+nn-1;
wm = imu(k:k1,1:3); dS = sum(trjod.od(k:k1,1)); t = imu(k1,end);
dr = drupdate(dr, wm, dS);
avp(ki,:) = [dr.avp; t]';
ki = timebar;
end
dr.distance,
avperr = avpcmp(avp, trjod.avp);
insplot(avp, 'DR', trj.avp);
inserrplot(avperr);
里程仪数据仿真部分
glvs
trj = trjfile('trj10ms.mat');
[nn, ts, nts] = nnts(2, trj.ts);
inst = [3;60;10]*glv.min; kod = 1; qe = 0; dT = 0; % od parameters
trjod = odsimu(trj, inst, kod, qe, dT, 0);
- 数据,test_SINS_trj.m中产生trj数据,imu为陀螺仪和加速度计的数据(真实无噪声),
avp为姿态速度位置数据(真实无噪声),wat、ts、repeats为产生轨迹时的数据。
- 设置里程仪的参数
inst(安装误差角,里程仪坐标系与载体坐标系之间的误差角)、kod(里程仪的刻度误差系数,默认为1)、qe(量化等效系数??,默认为0)、时间延迟dT。 - 使用 odsimu函数 输入真实的imu和avp信息、里程仪的参数,产生里程仪的测量数据。
误差添加部分
imuerr = imuerrset(0.01, 50, 0.001, 5);
imu = imuadderr(trjod.imu, imuerr);
davp = avperrset([60;0;60], 0, 0);
dinst = [15;0;10]*glv.min; dkod = 0.05;
dr = drinit(avpadderr(trjod.avp0,davp), inst+dinst, kod*(1+dkod), ts); % DR init
len = length(imu); avp = prealloc(fix(len/nn), 10);
ki = timebar(nn, len, 'DR simulation.');
添加imu误差,avp误差以及里程仪安装误差、刻度系数误差。
使用drinit函数进行DR初始化。
航位推算过程
for k=1:nn:len-nn+1
k1 = k+nn-1;
wm = imu(k:k1,1:3); dS = sum(trjod.od(k:k1,1)); t = imu(k1,end);
dr = drupdate(dr, wm, dS);
avp(ki,:) = [dr.avp; t]';
ki = timebar;
end
dr.distance,
avperr = avpcmp(avp, trjod.avp);
insplot(avp, 'DR', trj.avp);
inserrplot(avperr);
结果分析
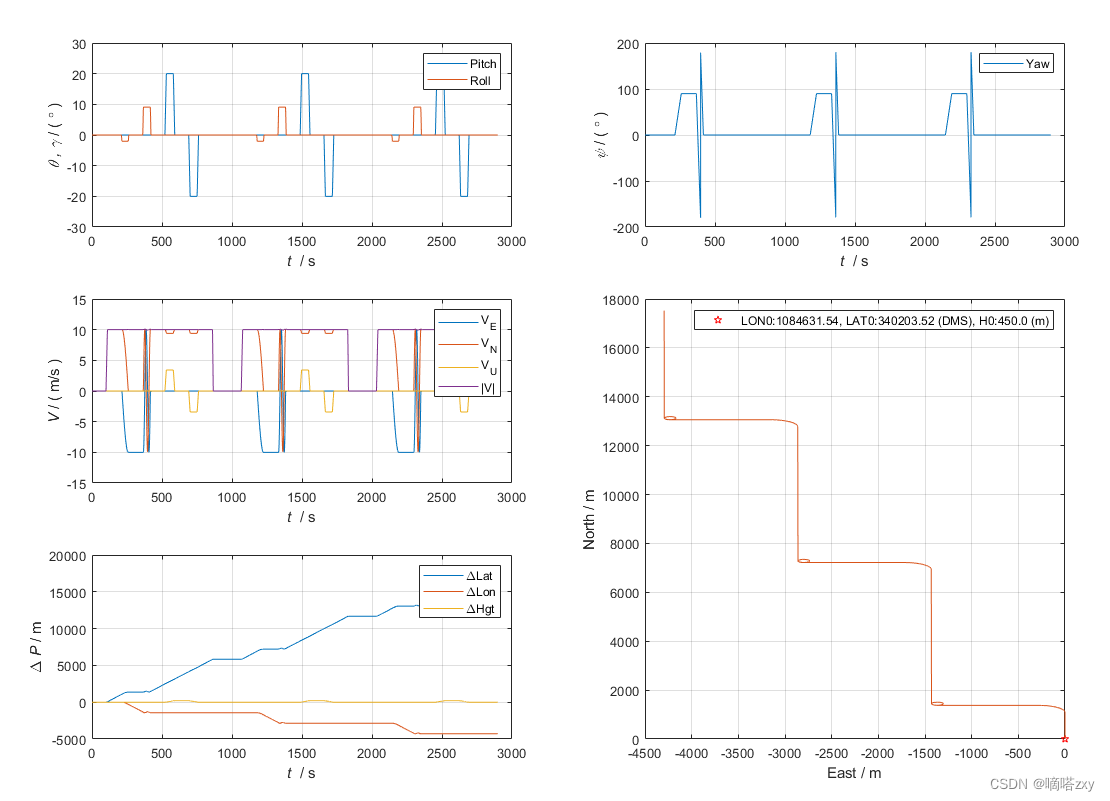
真实avp信息和轨迹:
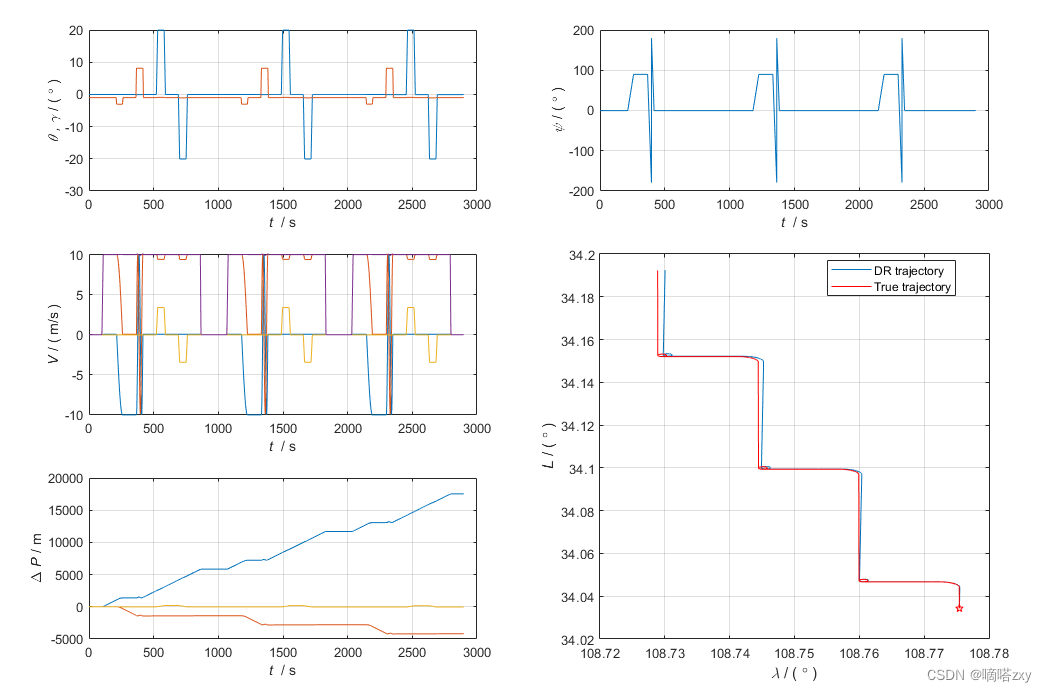
dr仿真出来的avp和轨迹数据(右下角DR trajectory为仿真轨迹):
insplot(trjod.avp, 'DR', trj.avp);
真实轨迹与仿真轨迹的偏差:
simuerr=avpcmp(trj.avp,trjod.avp);
inserrplot(simuerr);

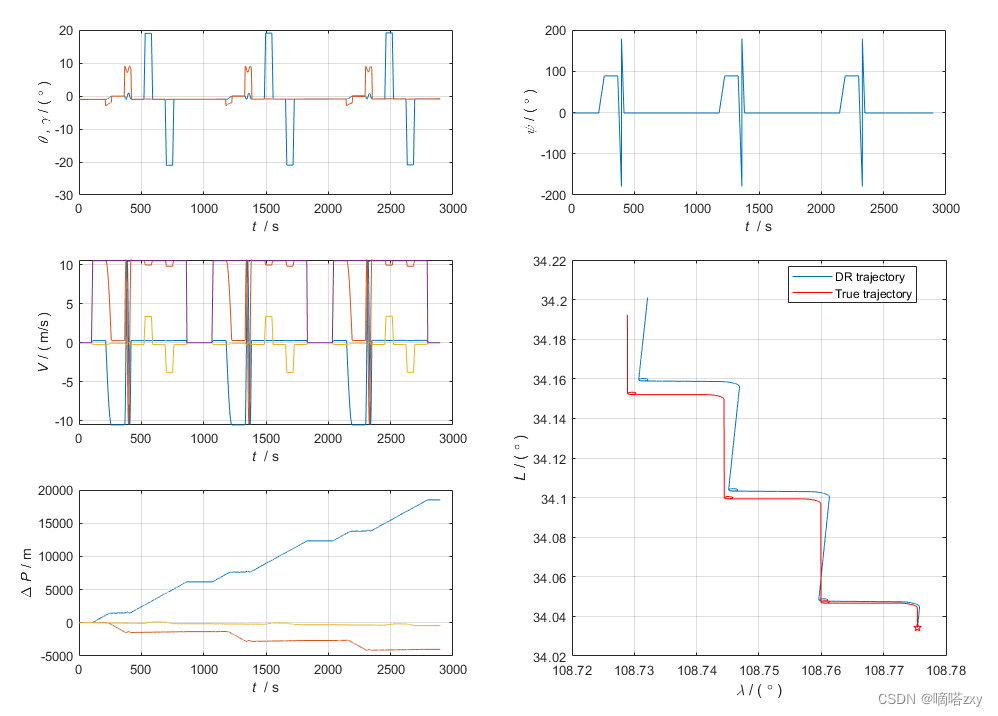
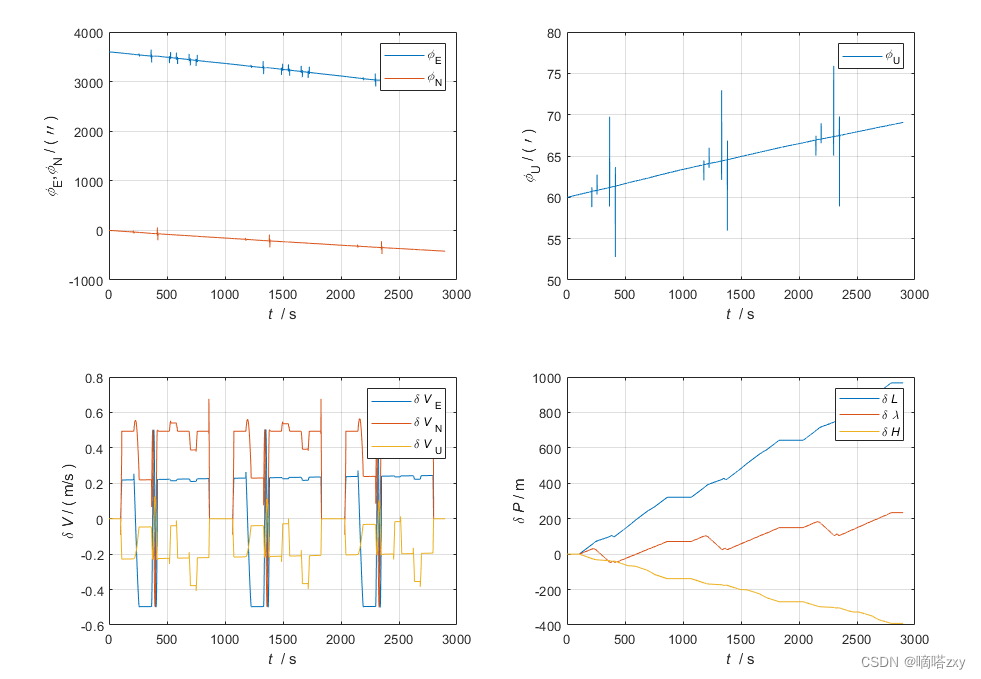
根据dr仿真数据(姿态、航向和路程增量)推算出来的结果:
DR解算和仿真轨迹的误差对比:
avperr = avpcmp(avp, trjod.avp);
inserrplot(avperr)
里程仪数据仿真函数odsimu
使用odsimu输入真实的imu和avp信息、里程仪的参数,产生里程仪的测量数据。
trjod = odsimu(trj, inst, kod, qe, dT, 0);
对里程仪的各个参数进行默认值处理:
function trj = odsimu(trj, inst, kod, qe, dt, ifplot)
if nargin<6, ifplot=0; end
if nargin<5, dt=0; end
if nargin<4, qe=0; end % default 0 meter/pulse, for no quantization
if nargin<3, kod=1; end % default 1 for no scale factor error
if nargin<2, inst=0; end
if length(inst)==1, inst=[1;1;1]*inst; end
数据处理分为4步:
- imu数据从{b0}旋转到{b1}系,b1为里程仪坐标系,b0为imu坐标系。
- 姿态avp从从{b0}旋转到{b1}系。
- 产生距离增长值,将dpos(纬度经度高度)转换到dxyz(在导航坐标系下的位置变化),在将xyz三个方向平方和开方求得dS;再进行时间延时处理;(初始dS置零后)叠加求和——得到里程仪的测距信息。
- 根据量化等效值对dS进行处理,diff操作又得到增量dS值。
Cb1b0 = a2mat(inst); Cb0b1 = Cb1b0';
% SIMU rotation
trj.imu(:,1:6) = [trj.imu(:,1:3)*Cb1b0', trj.imu(:,4:6)*Cb1b0'];
% attitude rotation
trj.avp0(1:3) = m2att(a2mat(trj.avp0(1:3))*Cb0b1);
for k=1:length(trj.avp)
trj.avp(k,1:3) = m2att(a2mat(trj.avp(k,1:3)')*Cb0b1)';
end
% distance increments
pos = [trj.avp0(7:9)'; trj.avp(:,7:9)];
% dS = pos2dS(pos, 10);
[RMh, clRNh] = RMRN(pos);
dpos = diff(pos);
dxyz = [[RMh(1:end-1), clRNh(1:end-1)].*dpos(:,1:2), dpos(:,3)];
dS = sqrt(sum(dxyz.^2,2));
t = trj.avp(:,10);
dS = interp1([t(1)-1;t;t(end)+1],[dS(1);dS;dS(end)], t+dt); % time delay
dS = cumsum([0;dS]);
if qe==0
dS = diff(dS/kod);
if ifplot==1, myfigure; plot(t,dS); xygo('Odometer / m'); end
else
dS = fix(diff(dS/kod/qe));
if ifplot==1, myfigure; plot(t,dS); xygo('Odometer / pulse'); end
end
最后得到od信息,包含路程增量信息和相应时间。
使用drpure函数得到含有的avdp值(十一列:avp+dS+t),此时的avp是根据dS(里程仪的输出)解算出来的的avp信息,最后去掉dS列,得到根据里程仪推算出来的avp信息(avpd)。此处涉及到 drpure函数 。
trj.od = [dS,t];
avpd = drpure([trj.imu(:,1:6), trj.od], trj.avp0, inst, kod); % re-calculate INS - IMU & AVP
avpd = [[trj.avp0',2*avpd(1,end)-avpd(2,end)]; avpd(:,[1:9,end])];
[trj.imu, trj.avp0, trj.avp] = ap2imu(avpd(:,[1:3,7:end]), trj.ts);
trj.avp(1,:) = [];
drpure函数
该函数以里程仪坐标系中的imu和od信息,初始avp,安装偏差角,刻度系数误差和时间延迟为输入,输出avpd信息,关于avpd信息又涉及两个函数 drinit 和 drupdate 。function avpd = drpure(imuod, avp0, inst, kod, Td)
if nargin<5, Td = 0; end
if nargin<4, kod = 1; end
if nargin<3, inst = [0;0;0]; end
[nn, ts] = nnts(2, diff(imuod(1:2,end)));
if length(avp0)<9, avp0=[avp0(1:3);zeros(3,1);avp0(4:end)]; end
dr = drinit(avp0, inst, kod, ts, Td);
len = size(imuod,1);
avpd = zeros(fix(len/nn), 11);
ki = timebar(nn, len, 'Pure DR navigation processing.');
for k=1:nn:len-nn+1
k1 = k+nn-1;
dr = drupdate(dr, imuod(k:k1,1:6), sum(imuod(k:k1,7:end-1))');
avpd(ki,:) = [dr.avp; dr.distance1; imuod(k1,end)]';
ki = timebar;
end
insplot(avpd(:,[1:9,11]));
drinit 初始化
初始化定义了结构体dr的变量。
- qnb、Cnb、att、avp、vn、kod
- aos(安装偏差角的y向即车辆行进方向,见里程仪坐标系建立)
- Cbo(从里程仪坐标系到IMU坐标系的变换矩阵)
- prj(关于速度的投影 OD到IMU)
- distance、distance1
- eth(关于某个具体位置pos的eth结构体)
- Mpv(根据速度计算dpos的关系矩阵)
for leveing此处不讨论
function dr = drinit(avp0, inst, kod, ts, Td)
dr = [];
avp0 = avp0(:);
if length(avp0)<9, avp0 = [avp0(1:3); zeros(3,1); avp0(4:end)]; end
dr.qnb = a2qua(avp0(1:3)); dr.vn = zeros(3,1); dr.pos = avp0(7:9);
[dr.qnb, dr.att, dr.Cnb] = attsyn(dr.qnb);
dr.avp = [dr.att; dr.vn; dr.pos];
dr.kod = kod;
dr.aos = inst(2); inst(2)=0; % AOS - angle of silde coefficient
dr.Cbo = a2mat(-inst)*kod;
dr.prj = dr.Cbo*[0;1;0]; % from OD to SIMU
dr.ts = ts;
dr.distance = 0; dr.distance1 = 0;
dr.eth = earth(dr.pos); dr.web = [0;0;0];
dr.Mpv = [0, 1/dr.eth.RMh, 0; 1/dr.eth.clRNh, 0, 0; 0, 0, 1];
if nargin<5, Td=0; end
dr.Td = Td;
if Td>0 % for leveling
xi=0.707; xi2=xi*xi; ws2=9.8/6738160; sigma=2*pi*xi/(Td*sqrt(1.0-xi2)); sigma2=sigma*sigma;
dr.gck(1) = 3.0*sigma;
dr.gck(2) = sigma2*(2.0+1.0/xi2)/ws2-1.0;
dr.gck(3) = sigma2*sigma/(9.8*xi2);
dr.wnc = zeros(3,1); dr.vni = zeros(3,1); dr.dpos = zeros(3,1);
end
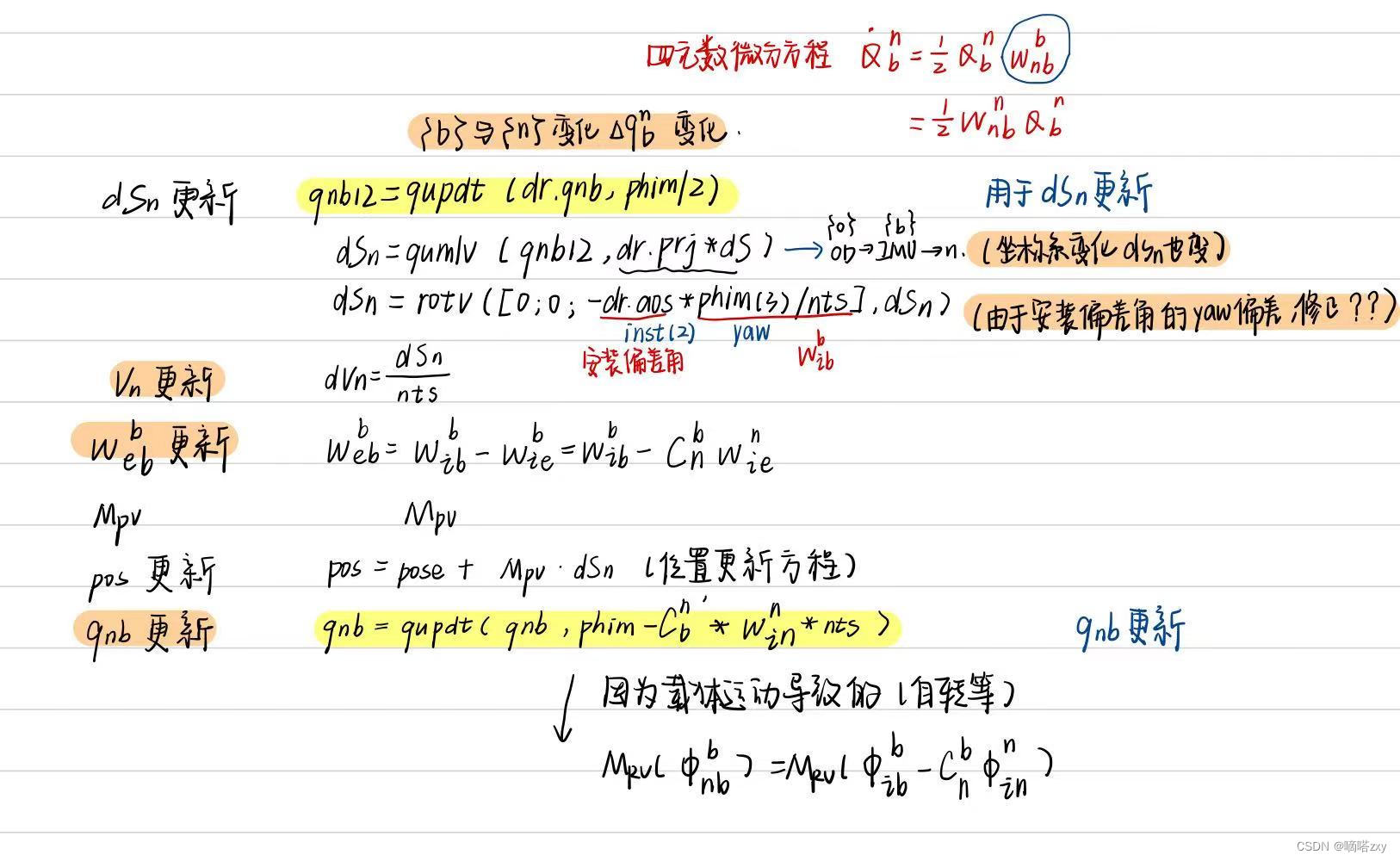
drupdate 更新
更新函数在初始化的基础上,输入imu和od信息,在初始化后对dr结构体进行更新。 更新变量如下:- distance,distance1,存放dr测的里程信息(dS之和),一个存放值(模值/范数)一个存放向量。
function dr = drupdate(dr, imu, dS)
nts = dr.ts*size(imu,1);
dr.distance = dr.distance + dr.kod*norm(dS);
dr.distance1 = dr.distance1 + dr.kod*dS;
- dSn更新,vn更新,web更新
[phim, dvbm] = cnscl(imu); qnb12 = qupdt(dr.qnb, phim/2);
if length(dS)>1,
dSn = qmulv(qnb12, dr.Cbo*dS);
else
dSn = qmulv(qnb12, dr.prj*dS);
end
% dSn = rotv([0;0;-dr.aos*norm(dS)/nts*phim(3)/nts], dSn);
dSn = rotv([0;0;-dr.aos*phim(3)/nts], dSn);
dr.vn = dSn/nts;
dr.eth = earth(dr.pos, dr.vn);
dr.web = phim/nts-dr.Cnb'*dr.eth.wnie;
dr.Mpv = [0, 1/dr.eth.RMh, 0; 1/dr.eth.clRNh, 0, 0; 0, 0, 1];
dr.pos = dr.pos + dr.Mpv*dSn; % see my PhD thesis Eq.(4.1.1)
dr.qnb = qupdt(dr.qnb, phim-dr.Cnb'*dr.eth.wnin*nts);
[dr.qnb, dr.att, dr.Cnb] = attsyn(dr.qnb);
dr.avp = [dr.att; dr.vn; dr.pos];
if dr.Td>0.01 % leveling
fn=qmulv(dr.qnb, dvbm/nts);
dVE = dr.vni(1) - dr.vn(1); % vni: inertial vel; vn: ref vel
dr.vni(1) = dr.vni(1) + (fn(1)-dr.gck(1)*dVE)*nts;
dr.dpos(1) = dr.dpos(1) + dVE*dr.gck(3)*nts;
dr.wnc(2) = dVE*(1+dr.gck(2))/6378137 + dr.dpos(1);
dVN = dr.vni(2) - dr.vn(2);
dr.vni(2) = dr.vni(2) + (fn(2)-dr.gck(1)*dVN)*nts;
dr.dpos(2) = dr.dpos(2) + dVN*dr.gck(3)*nts;
dr.wnc(1) = -dVN*(1+dr.gck(2))/6378137 - dr.dpos(2);
dr.qnb = qmul(rv2q(-dr.wnc*nts),dr.qnb);
dr.avp = [dr.att; dr.vni; dr.pos];
end
航位推算误差方程推导
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









