






比较纯惯导和DR解算
利用工具箱对test_SINS.m和test_DR.m整合,误差设置一致控制变量,代码如下。
%% loading data
close all
glvs
trj1 = trjfile('trj10ms.mat');
insplot(trj1.avp); subtitle('TURE');
trj = bhsimu(trj1, 1, 10, 3, trj1.ts);% Height simulation for barometric altimeter
%% data simulation
inst = [3;60;10]*glv.min; kod = 1; qe = 0; dT = 0; % od parameters
trjod = odsimu(trj, inst, kod, qe, dT, 0);subtitle('DR simulation');
%% imu error setting
imuerr = imuerrset(0.01, 50, 0.001, 5);
% imu = imuadderr(trjod.imu, imuerr);
imu1= imuadderr(trj.imu, imuerr);
% avp0 error setting
davp = avperrset([0.5;0.5;5], 0.1, [10;10;10]);
% davp = avperrset([60;0;60], 0, 0);
avp00 = avpadderr(trjod.avp0,davp);
avp01 = avpadderr(trj.avp0,davp);
%% calulation
dinst = [15;0;10]*glv.min; dkod = 0.05;
avpd = drpure([imu1(:,1:6), trjod.od], avp00, inst+dinst, kod*(1+dkod));subtitle('DR calculation');
avp = inspure(imu1, avp01, trj.bh, 1);subtitle('INS calculation');
insavperr = avpcmpplot(trj1.avp, avp);
dravperr = avpcmpplot(trj1.avp,[avpd(:,1:9),avpd(:,end)]);
trjsee(trj1.avp,avp,[avpd(:,1:9),avpd(:,end)])
legend('True trajectory', 'pure ins', 'DR');
1. 数据加载及dr数据仿真
可以看出DR使用imu和里程仪的数据,而ins仅使用imu数据进行解算。(dr使用的是odsimu仿真的加噪声数据,还是真实的imu加噪声后的数据,这里会影响失准角的误差)
2. 误差添加,同时影响DR和INS
| 误差类型 | 误差设置 | 含义 | 单位 |
|---|---|---|---|
| IMU数据 | eb | 0.01 | deg/h |
| db | 50 | ug | |
| web | 0.001 | deg/√h | |
| wdb | 5 | ug/√Hz | |
| 初始AVP | 姿态 | [0.5,0.5,5] | min |
| 速度 | 0.1 | m/s | |
| 位置 | [10 10 10] | m | |
| DR误差 | 安装偏差角dinst | [15,0,10] | min |
| 刻度系数dkod | 0.05 | / |
下图为使用真实imu加噪后的数据:

下图为使用仿真加噪后的数据:

使用真实imu加噪后的数据失准角误差与物体的姿态无关,使用仿真加噪后的数据失准角误差与物体的姿态有关且比较稳定,仿真的imu数据是根据ap信息解算出来的。
后面讨论使用仿真出的加噪imu数据。
3. 解算
可以看出ins的结果越来越偏离真实轨迹,另编写函数trjsee。

纯惯导avp误差:

DR的avp误差:
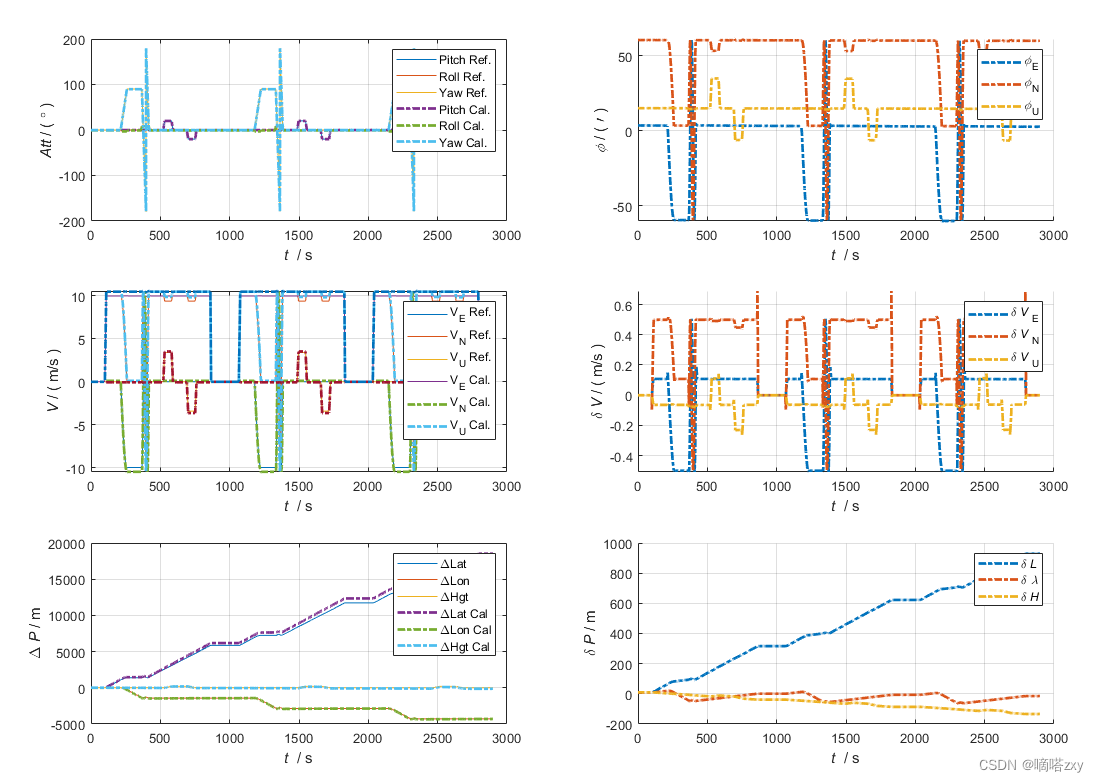
红色为DR,蓝色为INS:

对比纯惯导和DR的解算误差,可以看出:
- 在姿态解算方面,INS的失准角误差与初始设置[0.5,0.5,5]一致,而DR的失准角与里程仪的安装角偏差和物体的姿态相关(与姿态相关是因为使用的imu数据是仿真的数据)。
- 在速度解算方面,DR(±0.5m/s)明显优于INS。INS随时间增大,而DR也与安装角偏差和物体姿态相关。
- 在位置解算方面,从趋势来看INS的L和λ似乎呈振荡趋势,而DR的H和λ都较为平稳,L发散;在数据大小方面DR也优于INS,可以设置更长时长观察INS。
ps.INS对初始姿态很敏感,具体需要控制误差输入观察。
附:轨迹观察函数
function trjsee(avp,varargin)
avptrue=avp;
[avp1,avp2] = setvals(varargin);
myfigure;
plot(r2d(avptrue(:,8)), r2d(avptrue(:,7)),'LineWidth',2); xygo('lon', 'lat');
hold on, plot(r2d(avp1(:,8)), r2d(avp1(:,7)), 'r-','LineWidth',2);
hold on, plot(r2d(avp2(:,8)), r2d(avp2(:,7)), 'g-','LineWidth',2);
plot(r2d(avptrue(1,8)), r2d(avptrue(1,7)), 'rp');
legend('True trajectory', 'Calulated trajectory 1', 'Calulated trajectory 2','Location','Best');















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









