







PSINS工具箱学习与使用
刚开始入门惯性导航算法,看了一些书但实践出了一些问题,经推荐了解到西工大严恭敏老师的PSINS工具箱很适合自学,就在网上找了一些相关资料,很全。
网址:http://www.psins.org.cn/sy
b站介绍:https://www.bilibili.com/video/BV1R54y1E7ut/?vd_source=6ce8821b81ac808150f82236f5c1f721
简介

由于初学,我刚接触到的是base、data、demos文件夹:
- base里面放了一些必要的函数,b站视频里严老师讲编了大概有五百多个,其中一百多个较为常用;
- data存放一些数据;
- demos是一些比较经典的例子。
初始化和大概了解
psinsinit.m——安装工具箱,初始化
psinsmain.m——演示很多例子功能
上面两个文件的演示严老师视频里面说得很清楚了,初学者还用不太上。
test_SINS
这是刚开始学接触到的第一个一系列捷联惯导的例程,在demo文件夹下。
test_SINS_trj.m
自行产生一些avp信息以及角速度和比力值。
- trj–trajectory轨迹
- AVP,attitude,velocity,position
% Trajectory generation for later simulation use.
% See also test_SINS, test_SINS_GPS_153, test_DR.
% Copyright(c) 2009-2014, by Gongmin Yan, All rights reserved.
% Northwestern Polytechnical University, Xi An, P.R.China
% 10/06/2011, 10/02/2014
glvs
ts = 0.1; % sampling interval
avp0 = [[0;0;0]; [0;0;0]; glv.pos0]; % init avp
% trajectory segment setting
xxx = [];
seg = trjsegment(xxx, 'init', 0);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'accelerate', 10, xxx, 1);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnleft', 45, 2, xxx, 4);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'coturnright', 10*5, 9, xxx, 4);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'climb', 10, 2, xxx, 50);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'descent', 10, 2, xxx, 50);
seg = trjsegment(seg, 'uniform', 100);
seg = trjsegment(seg, 'deaccelerate', 5, xxx, 2);
seg = trjsegment(seg, 'uniform', 100);
% generate, save & plot
trj = trjsimu(avp0, seg.wat, ts, 1);
trjfile('trj10ms.mat', trj);
insplot(trj.avp);
imuplot(trj.imu);
pos2gpx('trj_SINS_gps', trj.avp(1:round(1/trj.ts):end,7:9)); % to Google Earth
- trj:轨迹结构体,imu和avp为其中的两个cell。imu,7列数据,最后一列是时间;avp,10列数据,最后一列是时间。
- glv:结构体-定义的全局变量,几乎每个.m文件都会进行全局定义一遍,函数:
glvs,定义了很多常量,可在base文件夹下找到,或者直接在代码中转到glvs,几乎所有函数都可以这种方式查询。 - trjsegment:函数,每个segment可自行定义。
- trjsimu:函数,轨迹模拟,输入初始位置和每个segment的状态,产生时间间隔,重复次数。trj结构体里面有很多cell,可以打开工作区查看。
- trjfile:函数,将trj保存.mat文件可直接加载,后续仿真都要提前load这些数据。
- insplot:工具箱里好用的画图函数,画出avp信息,b站视频也有严老师的详细讲解。
- imuplot:同上insplot,画出gyros和acc的测量值。
test_SINS.m
纯惯导解算avp信息,就是根据 trj10ms.mat里面imu测量值和avp0初始信息,去解算avp。
% SINS pure inertial navigation simulation. Please run
% 'test_SINS_trj.m' to generate 'trj10ms.mat' beforehand!!!
% See also test_SINS_trj, test_SINS_GPS_153, test_SINS_static.
% Copyright(c) 2009-2014, by Gongmin Yan, All rights reserved.
% Northwestern Polytechnical University, Xi An, P.R.China
% 17/06/2011
glvs
trj = trjfile('trj10ms.mat');
%% error setting
imuerr = imuerrset(0.01, 100, 0.001, 10);
imu = imuadderr(trj.imu, imuerr);
davp0 = avperrset([0.5;0.5;5], 0.1, [10;10;10]);
avp00 = avpadderr(trj.avp0, davp0);
trj = bhsimu(trj, 1, 10, 3, trj.ts);
%% pure inertial navigation & error plot
avp = inspure(imu, avp00, trj.bh, 1);
% avp = inspure(imu, avp00, 'f', 1);% 'f' - height free.
avperr = avpcmpplot(trj.avp, avp);
- 加载数据
- 误差设置,errset,adderr分别为设置值,加入误差值(imu,avp皆适用)。
imuerr——输入:【gyros,acc常数偏移,gyros,acc随机偏移(噪声)】
avperr——角度上通常yaw角设置误差较大,pitch和roll较小;速度上三个方向一致;位置上也是一致。
bhsimu,高度误差补偿,还未涉及,初步了解到是为了补偿位置上的高度。 - 解算avp,inspure纯惯导解算。输入imu测量数据,avp初始值,以及模式(具体见函数)等。
- 做图对比,inspure会绘图解算的avp信息,avpcmpplot画出对比以及误差图。
davp0 = avperrset([0.5;0.5;5], 0.1, [10;10;10]); % 初始asp误差设置
imuerr = imuerrset(0.01, 100, 0.001, 10);% IMU误差设置
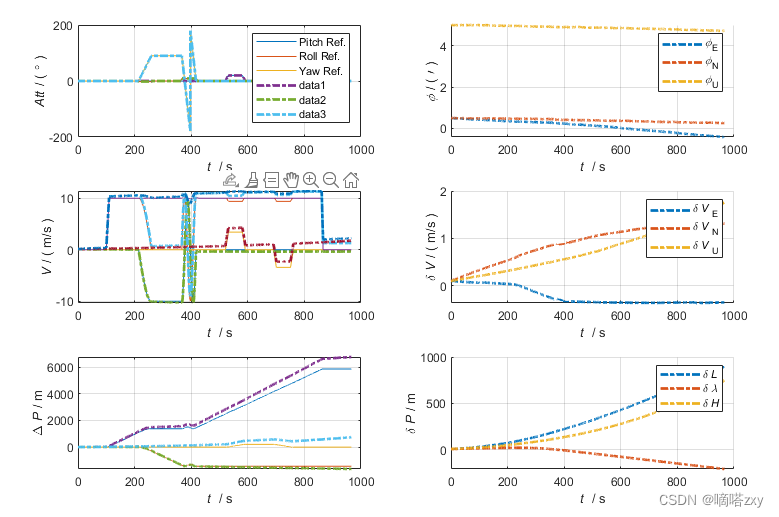
下面是未进行高度补偿,可以看到图6,高度上的误差发散。
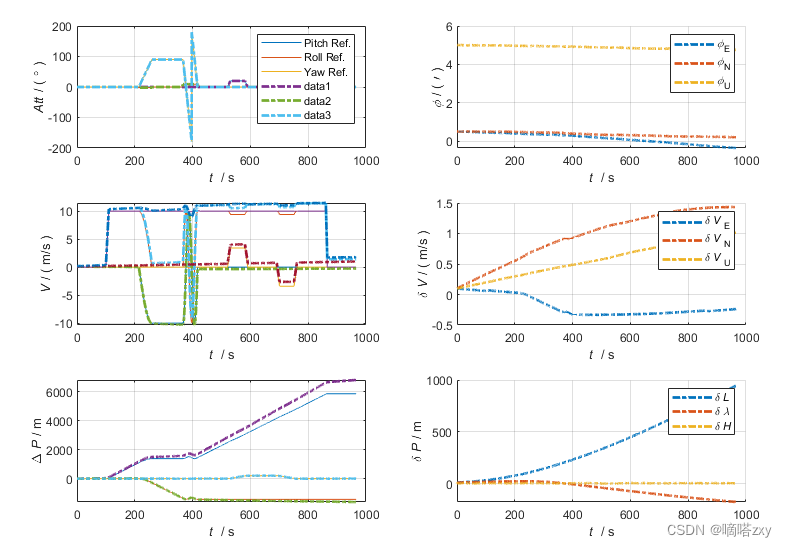
下面是进行高度补偿后:
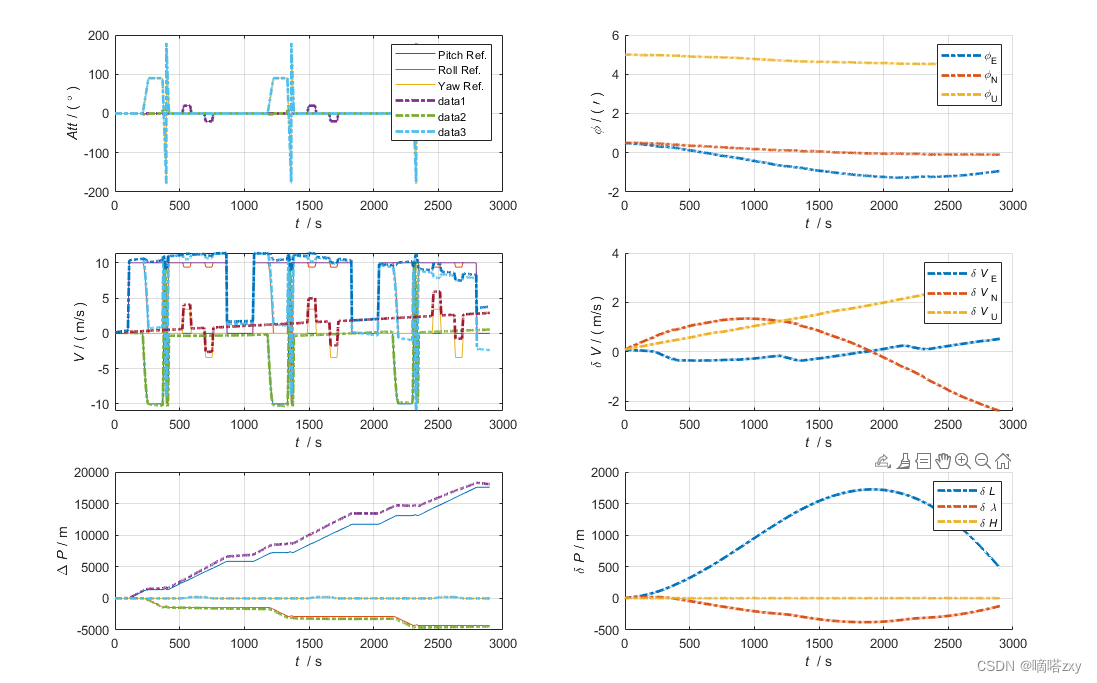
trj = trjsimu(avp0, seg.wat, ts, 3);% 将循环次数改为3,即可得到3000s的一个轨迹
高度补偿再加上更长时间的数据,此时位置误差是收敛的。
(ps:图1纵坐标单位为°,图2纵坐标为 ’ [errset里面角度误差的单位为glv.min] )
经过图片对比,可以观察到avp速度误差会随时间增大而增大,角度误差与初始位置有关,imuerrset的误差远小于初始误差,位置反而在一定时间内会收敛(某些误差因素抵消的原因?)。
test_SINS_GPS_153.m
将惯导和卫导组合,使用卡尔曼滤波进行滤波。此处涉及到卡尔曼滤波器,工具包将其写入kfupdate函数中,并且定义kf结构体,将滤波中所需要的矩阵都包含了。
文件命名15代表状态维数,3代表测量维数。
此处状态为:
- 三个姿态欧拉角(失准角?老师视频里说的不知道是哪几个字)
- 三个速度误差
- 三个位置误差
- 三个陀螺仪常值漂移
- 三个加速度计常值漂移
18维添加了三个卫导和惯导之间距离误差;19维添加了时间不同步误差。
1.代码初始化部分
- 全局变量定义,滤波器的维数定义
- 采样时间处理
- 误差添加
- 初始化ins
glvs
psinstypedef(153);
trj = trjfile('trj10ms.mat');
% initial settings
[nn, ts, nts] = nnts(2, trj.ts);
imuerr = imuerrset(0.03, 100, 0.001, 5);
imu = imuadderr(trj.imu, imuerr);
davp0 = avperrset([0.5;-0.5;20], 0.1, [1;1;3]);
ins = insinit(avpadderr(trj.avp0,davp0), ts);
2.卡尔曼滤波部分
- kfinit函数,根据ins输入,初始avp,imu测量误差以及初始位置误差初始化,见下,设置Qt、Rk、Pxk、Hk(imuerr有一系列的默认误差值)。
- kfupdate函数,根据输入值,可选择是状态更新还是测量更新。
- kf结构体包含很多滤波过程中需要的数据。
% KF filter
rk = poserrset([1;1;3]);% rk为卫导位置测量误差
kf = kfinit(ins, davp0, imuerr, rk);
% 设置最小协方差矩阵
kf.Pmin = [avperrset(0.01,1e-4,0.1); gabias(1e-3, [1,10])].^2; kf.pconstrain=1;
len = length(imu); [avp, xkpk] = prealloc(fix(len/nn), 10, 2*kf.n+1);
timebar(nn, len, '15-state SINS/GPS Simulation.');
ki = 1;
% 进入滤波
for k=1:nn:len-nn+1
k1 = k+nn-1;
wvm = imu(k:k1,1:6); t = imu(k1,end);
ins = insupdate(ins, wvm);
kf.Phikk_1 = kffk(ins);%定义状态转移矩阵
kf = kfupdate(kf);
if mod(t,1)==0 %ins间隔0.2s,gps间隔1s
posGPS = trj.avp(k1,7:9)' + davp0(7:9).*randn(3,1); % GPS pos simulation with some white noise
kf = kfupdate(kf, ins.pos-posGPS, 'M');
[kf, ins] = kffeedback(kf, ins, 1, 'avp');%反馈补偿
avp(ki,:) = [ins.avp', t];
xkpk(ki,:) = [kf.xk; diag(kf.Pxk); t]'; ki = ki+1;
end
timebar;
end
avp(ki:end,:) = []; xkpk(ki:end,:) = [];
% show results
insplot(avp);
avperr = avpcmpplot(trj.avp, avp);
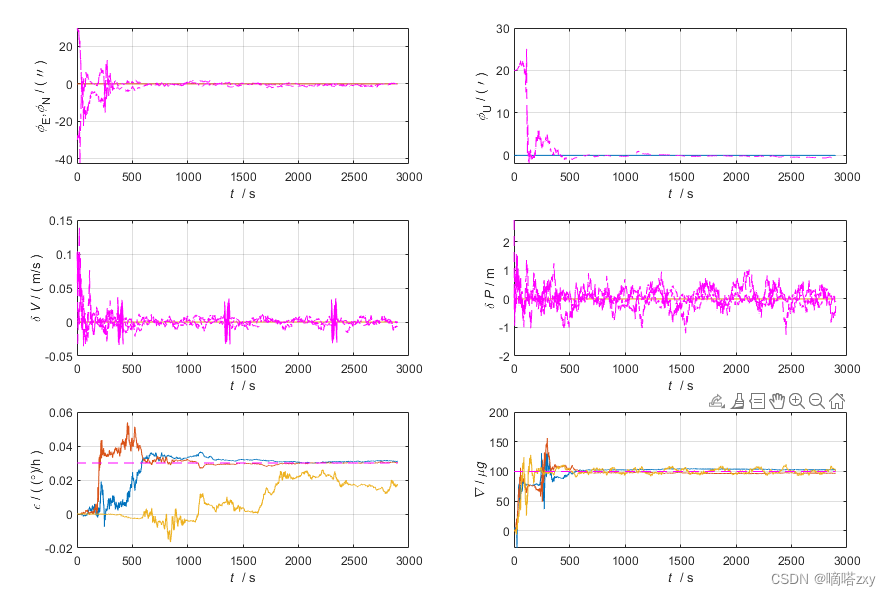
kfplot(xkpk, avperr, imuerr);
根据imu测量值和ins初始状态更新ins:
ins = insupdate(ins, wvm);
输入只有kf时,函数状态更新。
kf = kfupdate(kf);
输入有测量值时,且字符串为M,为测量更新。
kf = kfupdate(kf, ins.pos-posGPS, 'M');
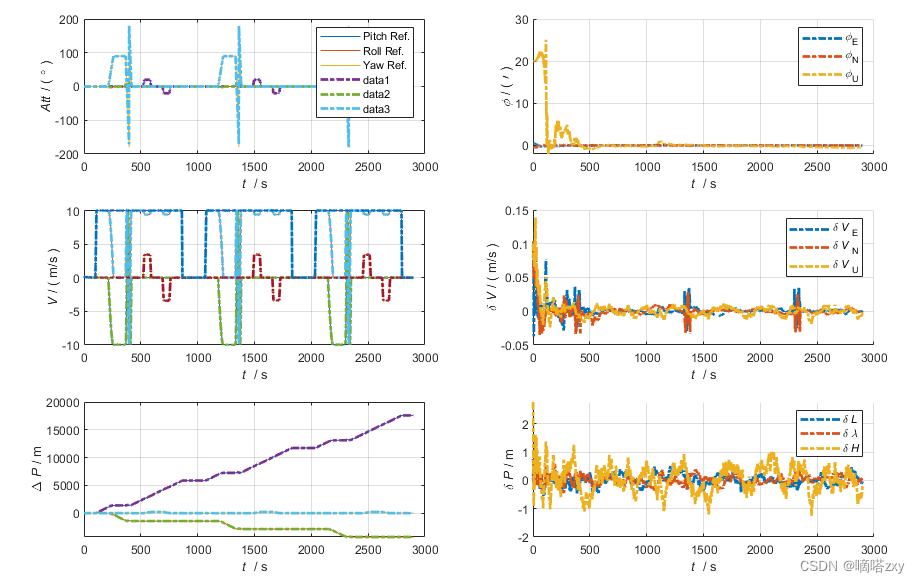
结果图分析,ASP误差明显优于纯惯导,估计出来的状态值也与真实值(实际中是不知道的,仿真的误差是实验设置的)相吻合。
总结
通过这三个程序,可以实现生成仿真ASP数据,IMU测量数据;纯惯导仿真;卫导和惯导组合仿真。














 1460
1460











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









