







最近设计了一个项目基于单片机的出租车计价器系统,与大家分享一下:
一、基本介绍
项目名:出租车计价器
项目编号:mcuclub-cl-008
单片机类型:STC89C52、STM32F103C8T6
具体功能:
1、通过DS1302获取时间,并判断此时是白天时间还是夜间时间,白天时间是凌晨6点到晚上22点,单价是2.5元/公里,3公里以内是起步价8元,夜间是晚上22点到凌晨6点,单价是3元/公里,3公里以内是起步价10元。停车时间内,每1分钟加收1块钱。不满1分钟不收费。
2、通过电机驱动模块驱动直流电机,模拟车轮,并通过红外对管进行测速,当速度值超过设置最大值,进行语音提醒
3、通过按键可查看一天的总单量、总里程、总金额,并可以清除记录
4、通过按键可修改时间、设置最大值速度值、设置各价格
5、通过按键,可语音提醒乘客系好安全带、目的地已到等
6、通过显示屏显示时间、速度、总公里、单价、总金额等
扩展功能:结账时,通过蓝牙模块将数据发送到手机端(此单里程、金额),可手机查看总单量、总里程、总金额、清除记录等
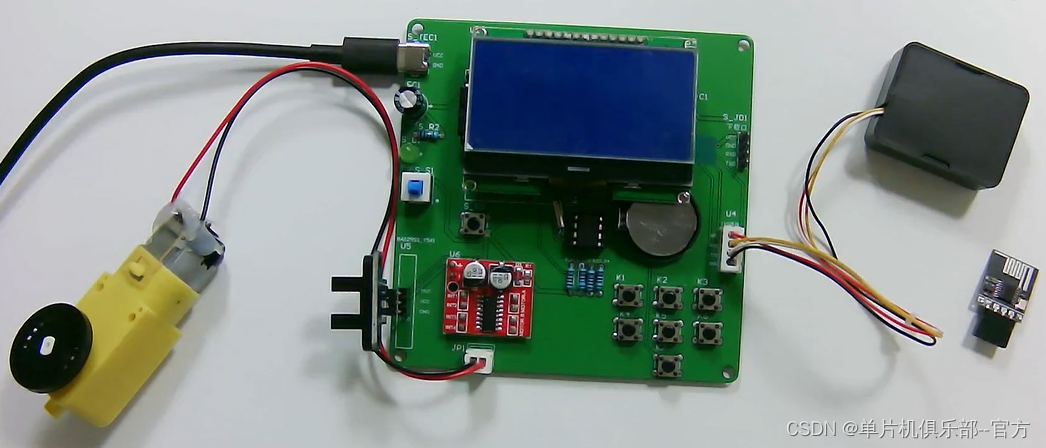
二、51实物图
单片机型号:STC89C52
板子为绿色PCB板,两层板,厚度1.2,上下覆铜接地。元器件基本上为插针式,个别降压芯片会使用贴片式。
供电接口:TYPE-C
三、51仿真图
仿真软件版本:proteus8.9
电路连线方式:网络标号连线方式
注意:部分实物元器件仿真中没有,仿真中会用其他工作原理相似的元件代替,这样可能导致实物程序和仿真程序不一样

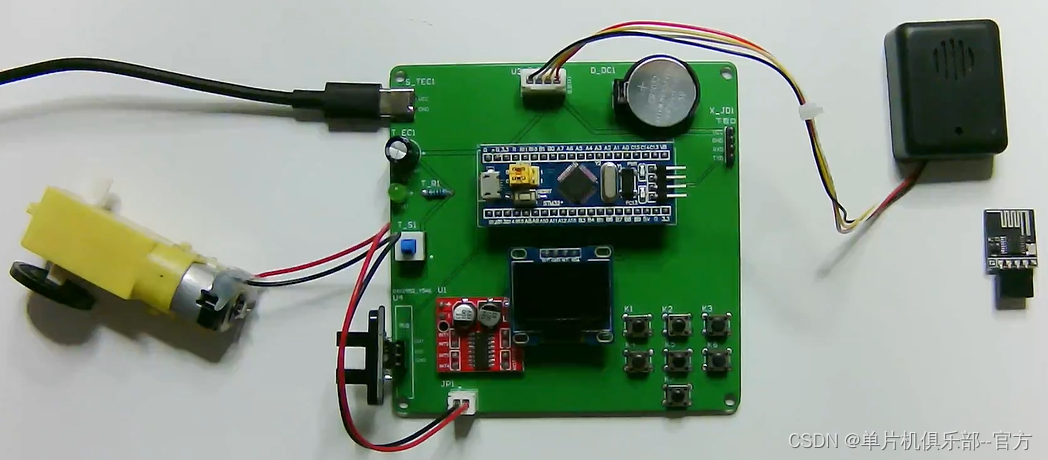
四、32实物图
单片机型号:STM32F103C8T6
板子为绿色PCB板,两层板,厚度1.2,上下覆铜接地。元器件基本上为插针式,个别降压芯片会使用贴片式。
供电接口:TYPE-C
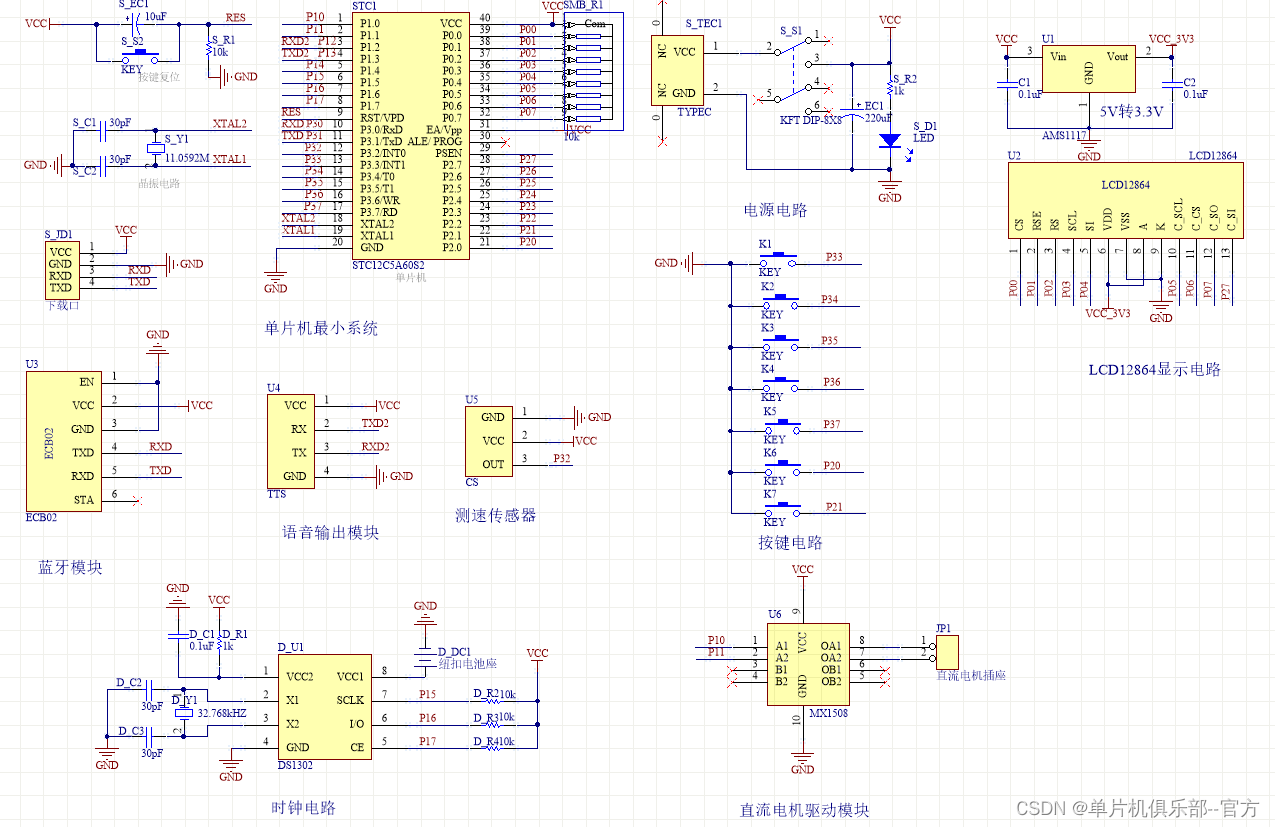
五、原理图
软件版本:AD2013
电路连线方式:网络标号连线方式
注意:原理图只是画出了模块的引脚图,而并不是模块的内部结构原理图
六、PCB图
由原理图导出,封装很大一部分都是作者自己绘制,不提供封装库,只提供连接好的源文件。中间有一个项目编号,隐藏在单片机底座下,插入单片机后不会看到。
两层板,上下覆铜接地。

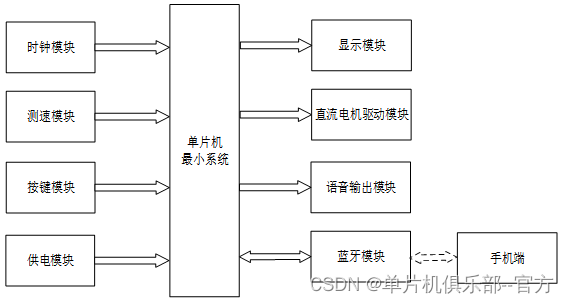
七、系统框图
本设计以单片机为核心控制器,加上其他模块一起组成此次设计的整个系统,其中包括中控部分、输入部分和输出部分。中控部分采用了单片机控制器,其主要作用是获取输入部分的数据,经过内部处理,逻辑判断,最终控制输出部分。输入由四部分组成,第一部分是时钟模块,通过该模块获取当前的时间;第二部分是测速模块,通过该模块测量当前车辆行驶的速度;第三部分是按键模块,通过该模块可以切换界面、设置时间、价格、速度挡位、记录、语音播报等;第四部分是供电模块,通过该模块可给整个系统进行供电。输出由四部分组成,第一部分是显示模块,通过该模块可以显示监测的数据以及设置的值;第二部分是直流电机驱动模块,通过该模块驱动车轮的旋转;第三部分是语音输出模块,通过该模块在在顾客乘坐公交车的时候进行上车欢迎及其下车提醒等。除此之外,蓝牙模块既作为输入又作为输出,蓝牙模块和手机进行连接,可以将监测的数据传输到用户手机端,用户也可以通过手机端发送指令获取当前总单量、总里程、总金额及其清除记录等。具体系统框图如图所示。
八、软件设计流程
系统的主流程图如图所示。在主程序中:首先对各个模块进行初始化,随后进入while主循环,在主循环中,首先进入第一个函数按键函数,该函数主要分为两部分,第一部分为调用按键扫描函数获取按键键值,第二部分通过键值进行相应的处理操作,包括切换界面、设置时间值等;紧接着进入第二个函数监测函数,该函数主要通过调用相应的驱动函数获取测量值,并通过蓝牙模块将监测的数据传输到手机端,用户也可以通过手机端发送指令,设备根据用户发送的指令执行对应的处理;紧接着进入第三个函数显示函数,该函数显示监测值及阈值;最后进入第四个函数处理函数,白天时间6-22点,单价为2.5元/公里,单价为3.0元/公里,马达挡位不为0,通过红外对管传感器获取速度值,车速超过设置最大值进行语音播报,路程小于3公里,总价为起步价,路程大于等于3公里,总价为起步价+(distance-3.0)*price+等待加价。

九、部分程序展示
软件版本:keil5
逻辑程序和驱动程序分开,分布于main.c和其他.c文件
void Manage_function(void)
{
if(ds1302_buf[4] >= 6 && ds1302_buf[4] < 22)//白天时间6-22点
{
price = day_price; //单价为2.5元/公里
}
else
{
price = night_price; //单价为3.0元/公里
}
if(motor_speed != 0) //马达挡位不为0,通过红外对管传感器获取速度值
{
flag_timer_begin = 1; //开始1s计时
if(flag_time_1s == 1) //1s计时到达,通过脉冲数*周长/时间,得到速度值
{
flag_time_1s = 0;
speed =( pulse_num/20.0 * ( 70/100.0 )* 3.14 /1) * 3.6*2.1;//仿车辆轮胎,速度 = (车轮圈数*车轮直径*π)这单位为m/s,要换算成km/h得*3.6 慢速型
distance += speed * 1 / 3600.0 * 10; //路程 = 速度 * 时间 (为方便演示故*10)
pulse_num = 0;
if(flag_bobao == 1) //触发播报五秒后可再次触发播报
{
flag_bobao_num++;
if(flag_bobao_num == 5)
{
flag_bobao_num = 0;
flag_bobao = 0;
}
}
else
{
flag_bobao_num = 0;
}
if(speed > speed_max && flag_bobao == 0)
{
flag_bobao = 1;
}
}
if(flag_bobao == 1 && flag_bobao_num == 0)
{
Uart2_Sent_Str("您已超速,请减速漫行\r\n"); //语音播报
flag_bobao_num = 1;
}
}
else
{
pulse_num = 0;
speed = 0;
flag_timer_begin = 0;
}
if(distance < 3) //路程小于3公里,总价为起步价
{
if(price == day_price) //白天,8元+等待加价
money = day_price_start + stop_time_all;
else //黑夜,10元+等待加价
money = night_price_start + stop_time_all;
}
else //路程大于等于3公里,总价为起步价+(distance-3.0)*price+等待加价
{
if(price == day_price)
money = day_price_start + (distance-3.0)*price + stop_time_all;
else
money = night_price_start+ (distance-3.0)*price + stop_time_all;
}
}















 760
760











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











