






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
摘要:本文将为通用电机设计一个PID控制器,以便了解这种类型的控制器,即使它们是最简单的,也能够以最佳方式控制系统,根据设计者想要实现的参数,最终目的是在课程结束时将这些控制器与模糊控制进行比较。
关于控制问题,最容易设计和实现的控制器是开关控制器,然而,这种类型的控制并不适合大多数系统,这就是为什么大多数时候谈论PID控制器的原因,因为它们非常简单、实用且非常有效。控制的一个优点是存在多种技术来进行设计,在这种情况下,我们谈论PID作为非常简单的控制器,然而,还存在其他控制技术,如补偿器、自适应控制、神经网络、模糊控制以及它们之间的组合,虽然很多时候仅仅一个简单的PID就足够了,但并不总是能够用这种类型的控制器解决所有问题。
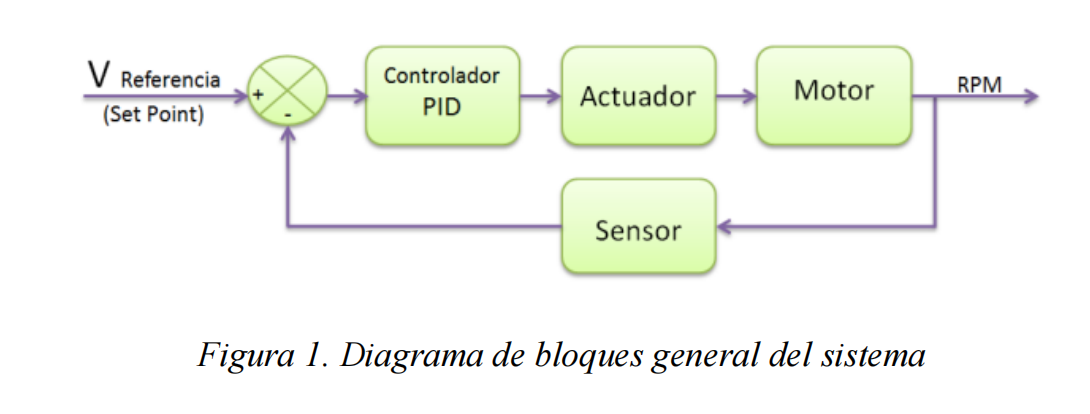
对于这个实验室,已经确定要为通用电机设计一个PID控制器,这个电机将直接连接到电网,也就是说,将在交流模式下工作。下面是系统的整体框图,这是我们希望达到的目标:
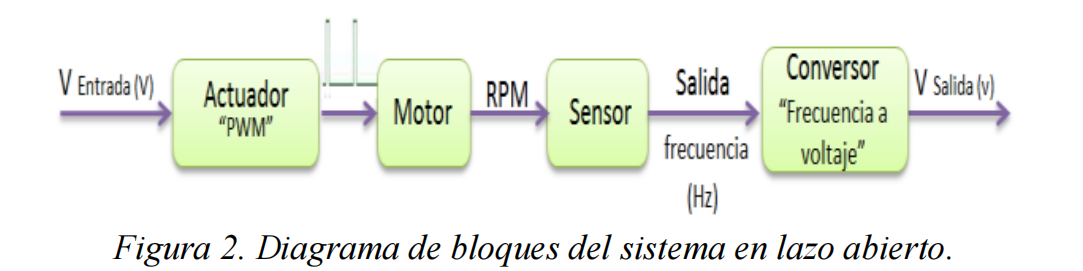
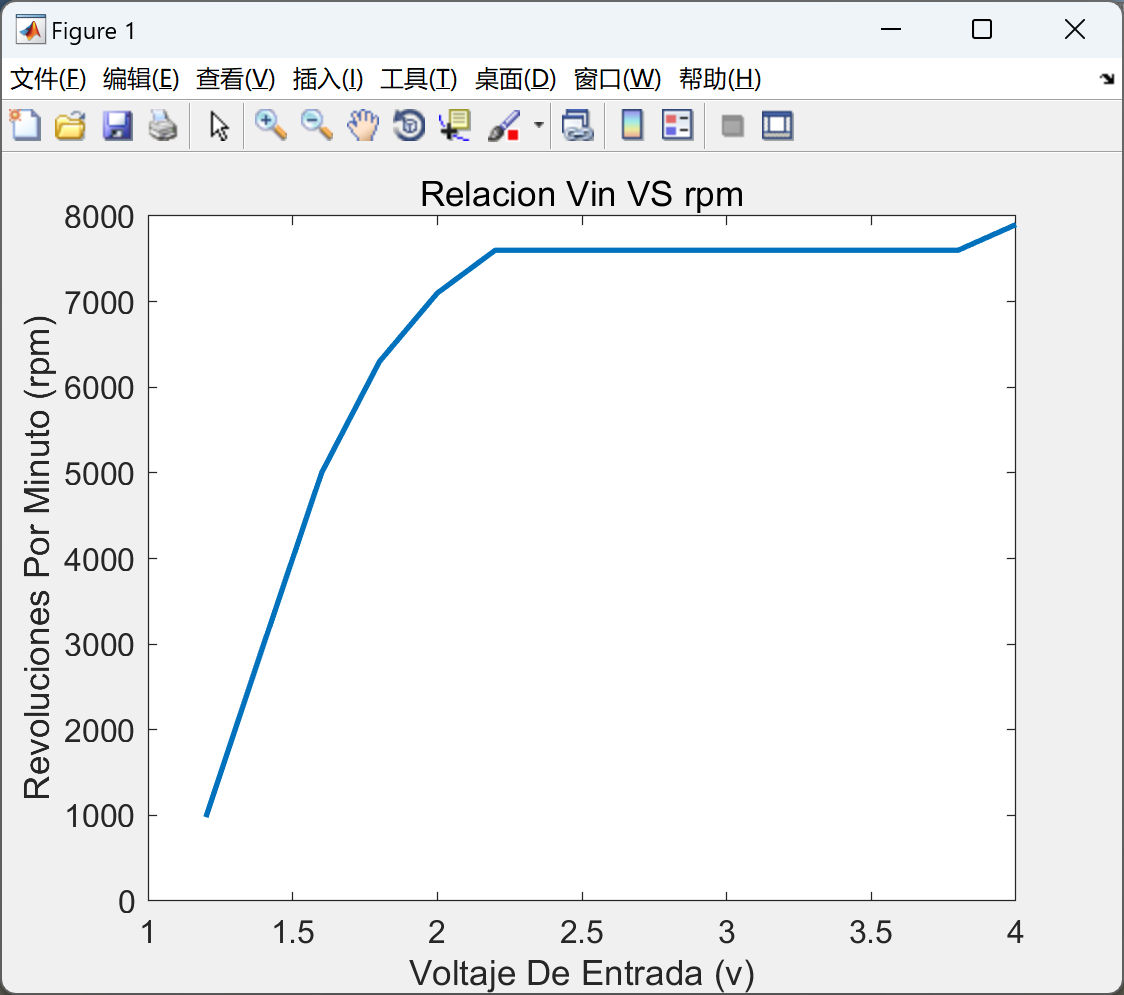
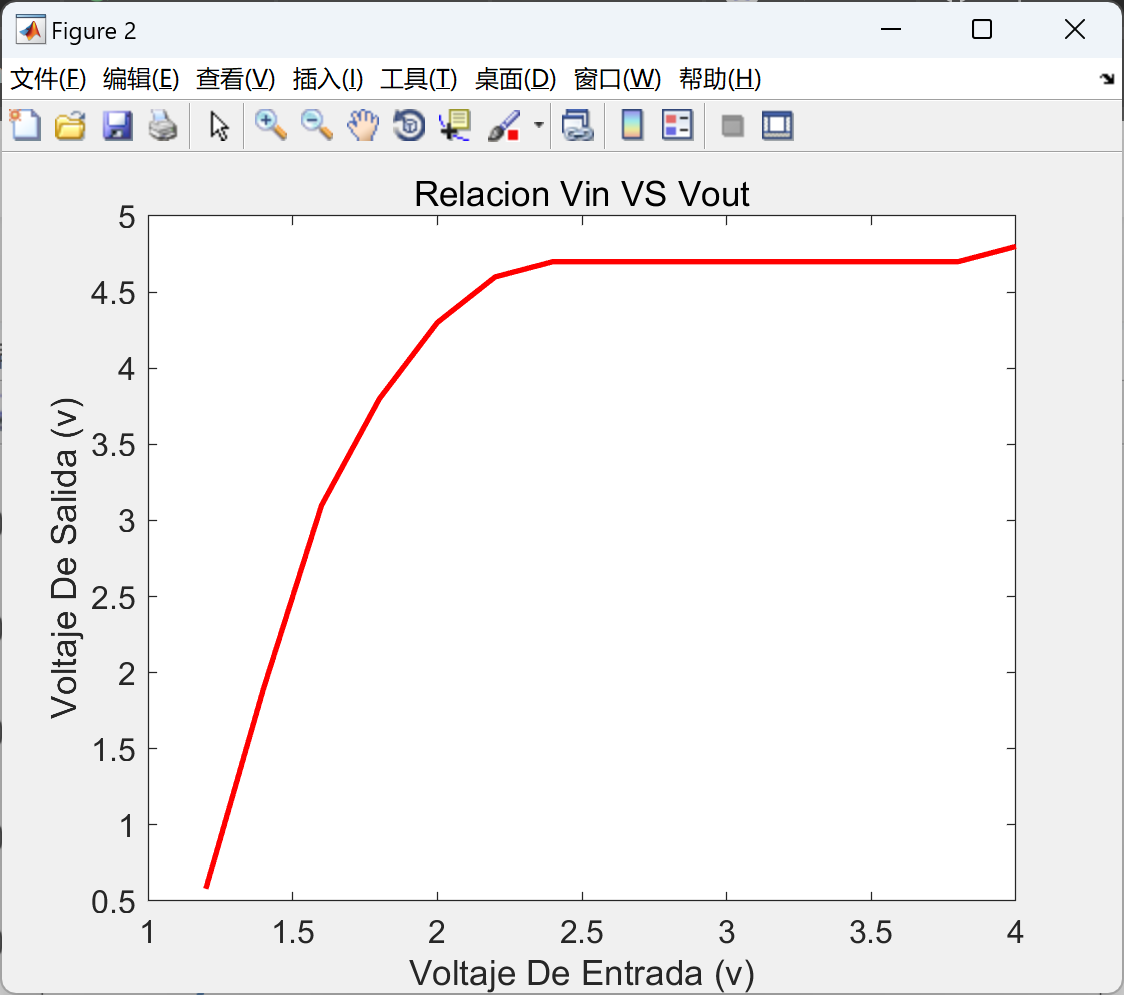
开始设计控制器时,首先要获得系统的传递函数,然而,为此必须确定系统的线性性,也就是说,必须确定系统在哪个部分或到哪个部分是线性的,并根据这一点来处理系统在该范围内的工作,这是因为众所周知,PID控制器仅适用于线性系统。在进行测试并确定工厂反应曲线时,考虑到以下框图。
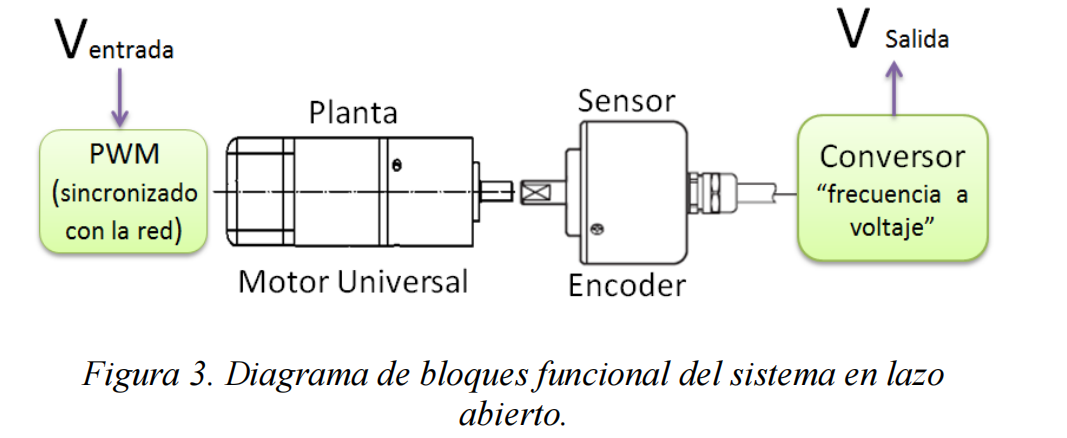
为了更好地理解如何获取这些参数,图3显示了系统的开环功能图。
📚2 运行结果
部分代码:
%% resultados
figure
data = csvread('okCH1.CSV',9,2)
data2 = csvread('okCH2.CSV',9,2)
var1 = data2(:,3);
var2 = data(:,2);
var3 = data(:,3);
hold on
a=plot(var2-.6,var3,'g')
b=plot(var2-.6,var1,'b')
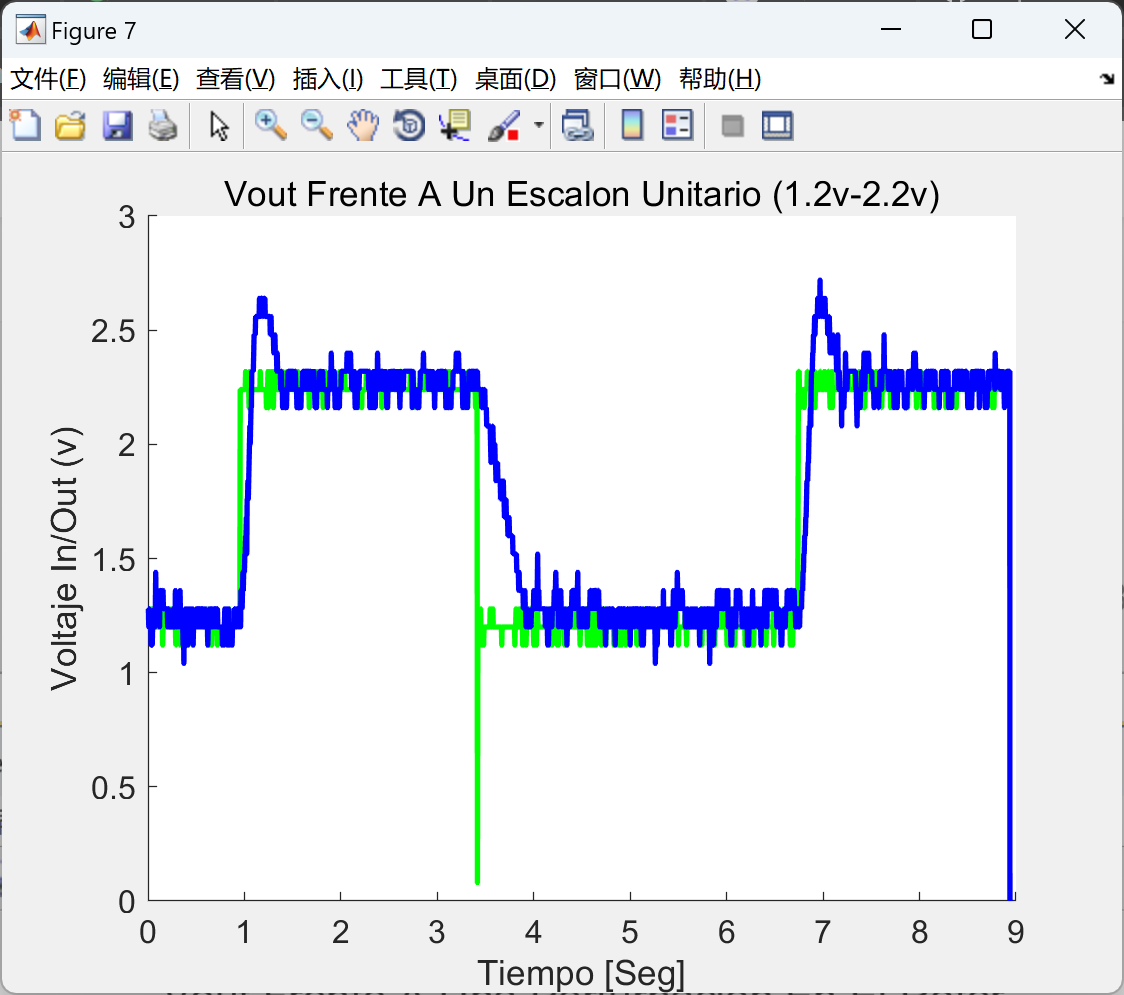
title('Vout Frente A Un Escalon Unitario (1.2v-2.2v)')
xlabel('Tiempo [Seg]')
ylabel('Voltaje In/Out (v)')
axis([0 9 0 3])
grid
% perturbaciones
figure
data = csvread('FCH1.CSV',9,2)
data2 = csvread('FCH2.CSV',9,2)
var1 = data2(:,3);
var2 = data(:,2);
var3 = data(:,3);
hold on
a=plot(var2-.6,var3,'g')
b=plot(var2-.6,var1,'b')
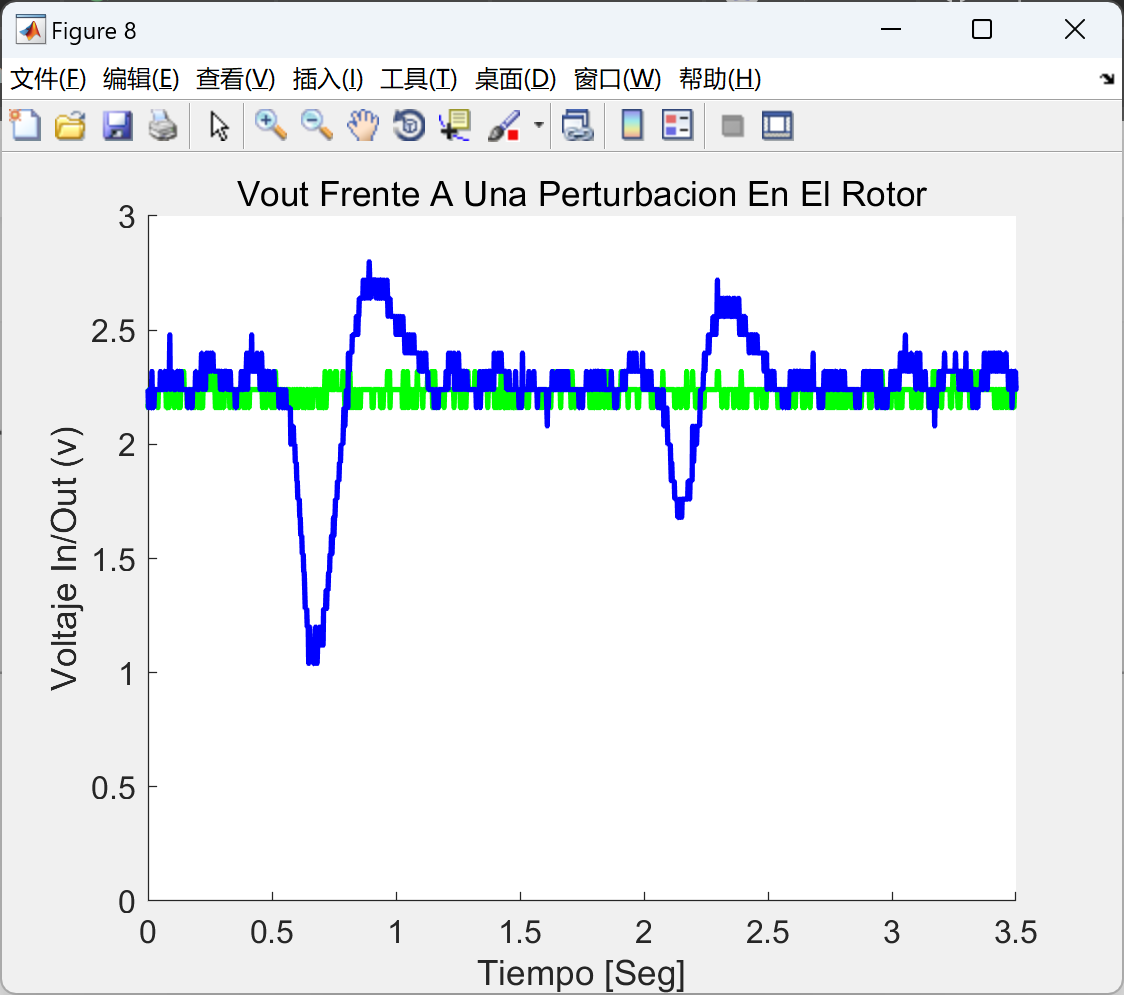
title('Vout Frente A Una Perturbacion En El Rotor')
xlabel('Tiempo [Seg]')
ylabel('Voltaje In/Out (v)')
axis([0 3.5 0 3])
grid
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。

















 6124
6124

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









