







USART
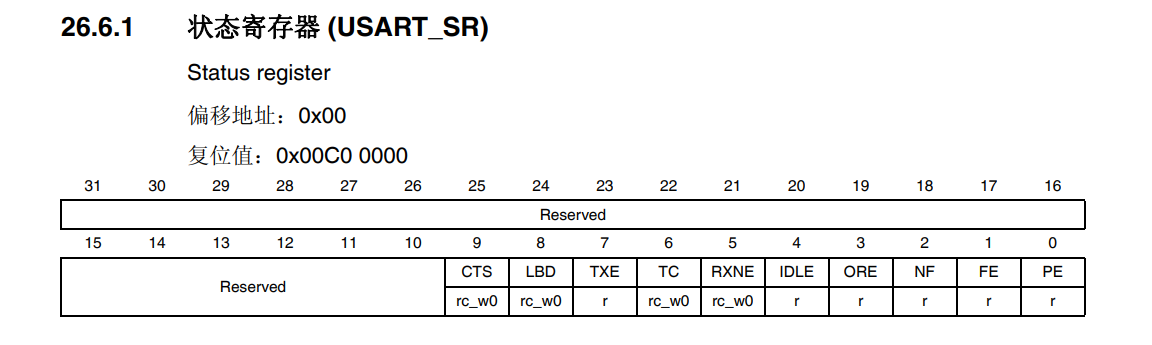
寄存器USART->SR

printf和scanf的重定向
半主机是这么一种机制,它使得在ARM目标上跑的代码,如果主机电脑运行了调试器,那么该代码可以使用该主机电脑的输入输出设备。
这点非常重要,因为开发初期,可能开发者根本不知道该 ARM 器件上有什么输入输出设备,而半主基机制使得你不用知道ARM器件的外设,利用主机电脑的外设就可以实现输入输出调试。
所以要利用目标 ARM器件的输入输出设备,首先要关掉半主机机制。然后再将输入输出重定向到 ARM 器件上,如 printf 和 scanf,你需要重写 fputc和 fgetc 函数。下面就是将 scanf 和 printf 重定向到 uart 的代码。
int fputc(int ch, FILE *f)
{
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)
{
}
USART_SendData(USART1, (uint8_t) ch);
return ch;
}
int fgetc(FILE *f)
{
int ch;
while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET)
{
}
ch = USART_ReceiveData(USART1);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)
{
}
USART_SendData(USART1, (uint8_t) ch);
return ch;
}printf() 之类的函数,使用了半主机模式。使用标准库会导致程序无法运行 ,以下是解决方法 :
方法 1.使用微库 ,因为使用微库的话 ,不会使用半主机模式 .
如果使用的是 MDK,请在工程属性的 “Target “- 》”Code Generation “中勾选 ”Use MicroLIB “这样以后就可以使用 printf ,sprintf 函数了
方法 2.仍然使用标准库 ,在主程序添加下面代码 :
/*为确保没有从 C 库链接使用半主机的函数,因为不使用半主机,标准 C 库 stdio.h 中有些使用半主机的函数要重新写 ,您必须为这些函数提供自己的实现
#pragma import(__use_no_semihosting) // 确保没有从 C 库链接使用半主机的函数
_sys_exit(int x) //定义 _sys_exit() 以避免使用半主机模式 :一般加void
{
x = x;
}
struct __FILE // 标准库需要的支持函数
{
int handle;
};
FILE __stdout;在独立应用程序中,您不太可能支持半主机操作。 因此,必须确保您的应用程序中没有链接 C 库半主机函数。为确保没有从 C 库链接使用半主机的函数, 必须导入符号 __use_no_semihosting 。可在您工程的任何 C 或汇编语言源文件中执行此操作,如下所示:
在 C 模块中,使用 #pragma 指令:
#pragma import(__use_no_semihosting)在汇编语言模块中,使用 IMPORT 指令:
IMPORT __use_no_semihosting如果仍然链接了使用半主机的函数,则链接器会报告错误。
串口printf打印:
1、操作寄存器法:
/* 标准库需要的支持函数 */
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
};
FILE __stdout;
//加入了返回类型
void _sys_exit(int x)
{
x = x;
}
//重定向:可改成USART2->SR USART2->DR
/* 重定义fputc函数 */
int fputc(int ch, FILE *f)
{
// 当USART1的发送数据寄存器空闲位(TC,位7,0x40)为0时,表示上次发送还未完成
while((USART1->SR & 0X40) == 0); // 循环等待,直到发送完毕
// 当发送完毕(即TC为1),将要发送的字符(已转换为uint8_t类型)写入USART1的数据寄存器(DR)
USART1->DR = (uint8_t)ch;
// 返回成功发送的字符,遵循fputc函数的标准行为
return ch;
}循环移位:TXE位
int fputc( int ch, FILE *f )
{
USART_TypeDef *USARTx=USART1;
USARTx->DR=ch; //将数据写入DR寄存器
while((USARTx->SR & (1<<7))==0); //观察状态寄存器TXE位是否为1,是1的话,数据转移到了数据寄存器
return ch;
}2、函数法:
以下使用的是:需要在工程选项里勾选Use MicroLIB
/**
* 函 数:串口发送一个字节
* 参 数:Byte 要发送的一个字节
* 返 回 值:无
*/
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //直到SET结束循环,等待发送完成
/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}
/**
● 函 数:使用printf需要重定向的底层函数
● 参 数:保持原始格式即可,无需变动
● 返 回 值:保持原始格式即可,无需变动
*/
int fputc(int ch, FILE *f){
Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数
return ch;
}sprintf也可打印函数
/*方法2:使用sprintf打印到字符数组,
再用串口发送字符数组,此方法打印到字符数组,
之后想怎么处理都可以,可在多处使用*/
char String[100]; //定义字符数组
sprintf(String, "\r\nNum3=%d", 333);//使用sprintf, 把格式化字符串打印到字符数组
Serial_SendString(String); //串口发送字符数组(字符串)
/**
* 函 数:串口发送一个字符串
* 参 数:String 要发送字符串的首地址
* 返 回 值:无
*/
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止
{
Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据
}
}自己分装函数实现打印
要包含头文件
#include <stdarg.h>
/**
* 函 数:自己封装的prinf函数
* 参 数:format 格式化字符串
* 参 数:... 可变的参数列表
* 返 回 值:无
*/
void Serial_Printf(char *format, ...)
{
char String[100]; //定义字符数组
va_list arg; //定义可变参数列表数据类型的变量arg
va_start(arg, format); //从format开始,接收参数列表到arg变量
vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中
va_end(arg); //结束变量arg
Serial_SendString(String); //串口发送字符数组(字符串)
}实验
串口初始化
/******************************************************************************
* @brief 初始化串口1作为调试端口
*
* @param[in] bound_rate : 波特率
*
* @return 无
*
******************************************************************************/
void Debug_Init(uint32_t bound_rate)
{
/* GPIO端口设置 */
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);//使能USART1时钟
/*与F1系列的不同:串口1对应引脚复用映射,使得PA9/PA10有了输入输出 */
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1); //PA9复用为USART1_TX
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1); //PA10复用为USART1_RX
/* USART1端口配置 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9,PA10
/* USART1 初始化设置 */
USART_InitStructure.USART_BaudRate = bound_rate; //波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //8位数据位长
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
USART_Cmd(USART1, ENABLE); //使能串口
}
调用库函数自带的串口函数时,每次发送前要判断SR寄存器的数据是否发送完成;
若调用上述自己写的Serial_Send...函数时,函数内部已经判断,不需要判断;
int main(void)
{
Debug_Init(115200);
while((USART1->SR & 0X40) == 0);
USART_SendData(USART1, 'A');
while((USART1->SR & 0X40) == 0);
USART_SendData(USART1, 'B');
while((USART1->SR & 0X40) == 0);
USART_SendData(USART1, '\r');
while((USART1->SR & 0X40) == 0);
USART_SendData(USART1, '\n');
printf("uart is ok\r\n");
while (1) {
;
}
}TIMER
TIM3实现定时1微秒;通过指针改变TIM3得寄存器来实现延时毫秒和微秒
#include "delay.h"
/******************************************************************************
* @brief 通用定时器3初始化
* 定时器溢出时间计算方法:Tout = ((arr + 1) * (psc + 1)) / Ft us.
* Ft = 定时器工作频率, 单位: Mhz
*
* @param[in] arr : 自动重装值
* @param[in] psc : 时钟预分频数
*
* @return 无
*
******************************************************************************/
void TIM3_Init(uint16_t arr, uint16_t psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能TIM3时钟
//配置时基单元,并未开启TIM3
TIM_TimeBaseInitStructure.TIM_Prescaler = psc; //定时器分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Down; //向下计数模式
TIM_TimeBaseInitStructure.TIM_Period = arr; //自动重装载值
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //初始化定时器3
}
/******************************************************************************
* @brief 初始化定时器延时函数,定时1us
* @param[in] 无
*
* @return 无
*
******************************************************************************/
int Delay_Init(void)
{
TIM3_Init(100 - 1, 84 - 1); //定时1微秒
return 0;
}延时微秒
由于是向下计数,CNT从ARR到0,产生下溢事件;在此才开启定时器3,定时时间到,关闭定时器
/******************************************************************************
* @brief 微秒级延时
*
* @param[in] us : 延时微秒数
*
* @return 无
*
******************************************************************************/
void Delay_Us(uint32_t us)
{
TIM3->ARR = us; //自动重载器
TIM3->CNT = TIM3->ARR; //计数器
TIM_Cmd(TIM3, ENABLE); //启动定时器
while (TIM3->CNT) {;} //等待延时时间到 //CNT递减
TIM_Cmd(TIM3, DISABLE); //关闭定时器
}延时毫秒
调用延时微秒函数,实现延时毫秒
/******************************************************************************
* @brief 毫秒级延时,不建议在OS中使用
*
* @param[in] us : 延时毫秒数
*
* @return 无
*
******************************************************************************/
void Delay_Ms(uint32_t ms)
{
for(int i = 0; i < ms; i++){
Delay_Us(1000);
}
}
















 269
269

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









