







学习资料
- 学习视频:【CAN总线入门教程-全面细致 面包板教学 多机通信】 【精准空降到 00:02】 https://www.bilibili.com/video/BV1vu4m1F7Gt/?share_source=copy_web&vd_source=8af85e60c2df9af1f0fd23935753a933&t=2
- 资料下载:
https://jiangxiekeji.com/download.html
获取视频中出现的所有资料
- 我们的淘宝店:
https://jiangxiekeji.taobao.com
获取视频中出现的硬件设备
淘宝店铺名:江协科技
CAN简介
- CAN总线(Controller Area Network Bus)控制器局域网总线(设计理念:CAN总线构建一种局域网,每一个挂在在这个局域网内的设备,都可以利用这个局域网去发送自己的消息,也可以接收局域网的各种消息,每个设备都是平等的,都在共享局域网的通信资源)
- CAN总线是由BOSCH公司开发的一种
简洁易用、传输速度快、易扩展、可靠性高、稳定性高的串行通信总线,广泛应用于汽车、嵌入式、工业控制等领域 - CAN总线特征:
- 两根通信线(CAN_H、CAN_L),线路少,无需共地
- 差分信号通信,抗干扰能力强
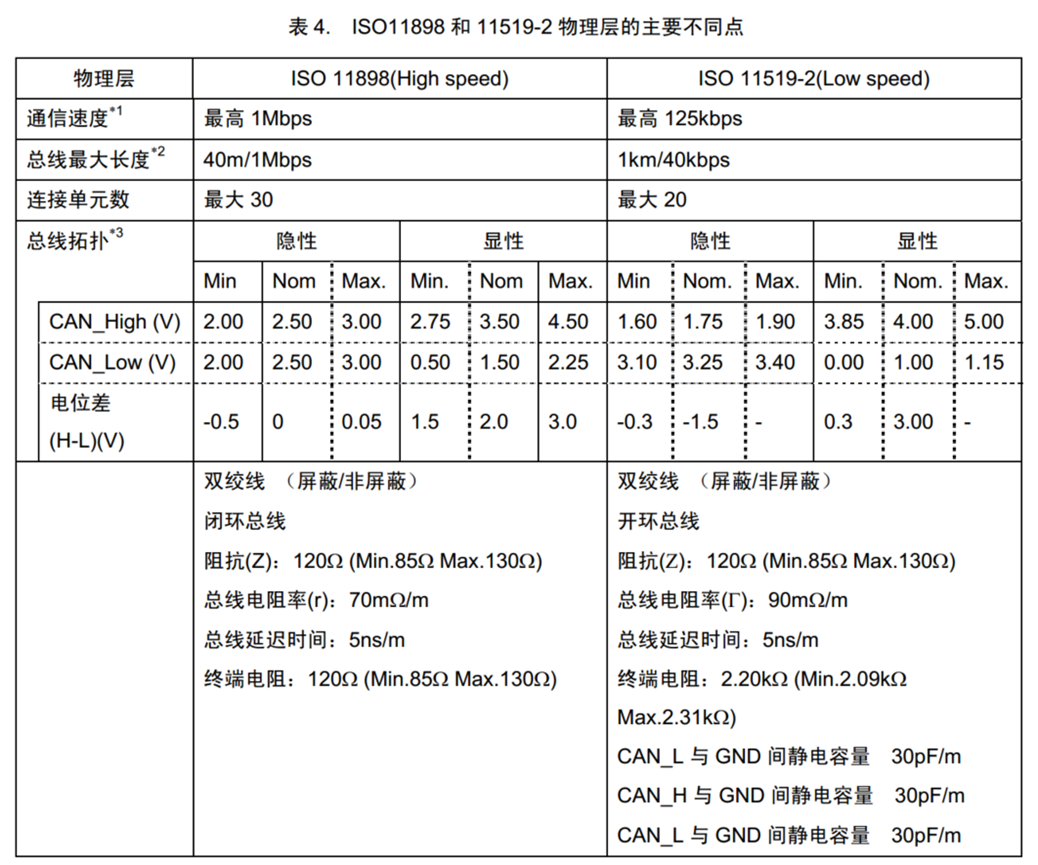
- 高速CAN(ISO11898):125k~1Mbps,传输距离<40m(高速CAN传输快距离短)
- 低速CAN(ISO11519):10k~125kbps,传输距离 <1km(低速CAN传输慢距离长)
- 异步,无需时钟线,通信速率由设备各自约定
半双工,可挂载多设备,多设备同时发送数据时通过仲裁判断先后顺序11/29位报文ID,用于区分消息功能,同时决定优先级- 可配置
1~8字节的有效载荷 - 可实现广播式和请求式两种传输方式
- 应答、CRC校验、位填充、位同步、错误处理等特性。
主流通信协议对比
UART串口、I2C、SPI、CAN
CAN总线是UART和I2C的结合体,再加亿点点细节
| 名称 | 引脚 | 双工 | 时钟 | 电平 | 设备 | 应用场景 |
|---|---|---|---|---|---|---|
| UART | TX、RX | 全双工 | 异步 | 单端 | 点对点 | 两个设备相互通信 |
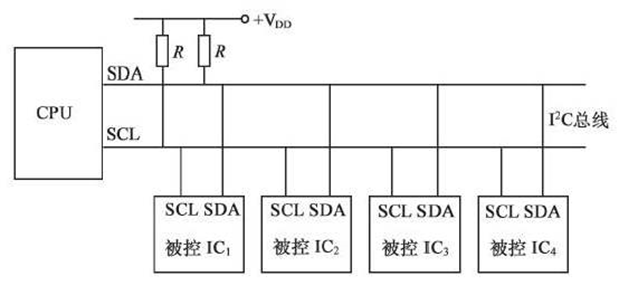
| I2C | SCL、SDA | 半双工 | 同步 | 单端 | 多设备 | 一个主控外挂多个模块 |
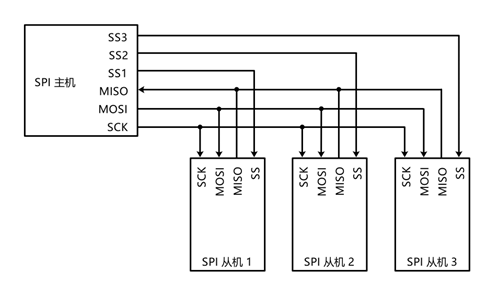
| SPI | SCK、MOSI、MISO、SS | 全双工 | 同步 | 单端 | 多设备 | 一个主控歪哥多个模块(高速) |
| CAN | CAN_H、CAN_L | 半双工 | 异步 | 差分 | 多设备 | 多个主控相互通信 |

CAN硬件电路
- 每个设备通过CAN收发器挂载在CAN总线网络上(每个设备都可以是CAN的主控系统,CAN收发器就是一个芯片,主要实现电平转换、输出驱动和输入采样几个功能)
- CAN控制器引出的TX和RX与CAN收发器相连,CAN收发器引出的CAN_H和CAN_L分别与总线的CAN_H和CAN_L相连(CAN总线使用差分信号,用双绞线作为载体,减少干扰)
- 高速CAN使用闭环网络,CAN_H和CAN_L两端添加120Ω的终端电阻
- 120Ω的终端电阻作用1:防止
回波反射(“传输学理论”),数据传输时,信号在边沿跳变几次,干扰数据的正确传输;如果加了终端电阻且阻抗匹配,如下图所示:)
- 作用2:在没有设备操作时,将两根差分线的电压收紧,就是将两根线的电压拉到同一水平,默认是1状态,像一根弹簧一样,和I2C的上拉电阻一样的(默认拉高)代价就是CAN的功耗大!
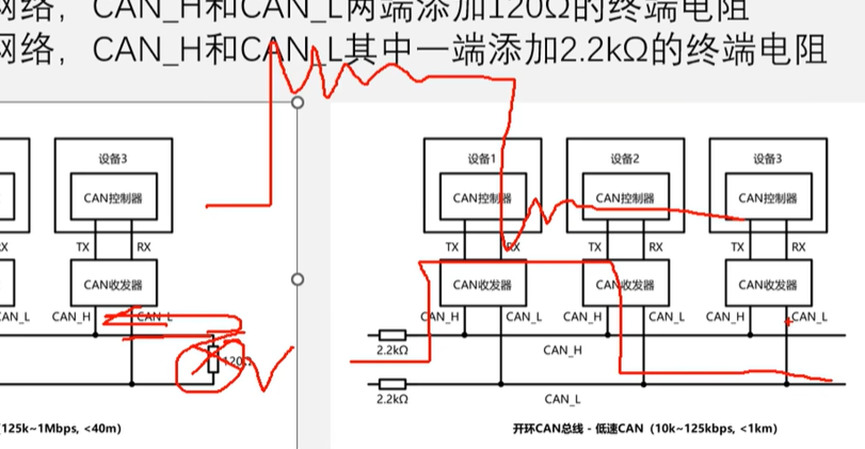
低速CAN使用开环网络,CAN_H和CAN_L其中一端添加2.2kΩ的终端电阻
CAN电平标准
- CAN总线采用差分信号,即两线电压差(VCAN_H-VCAN_L)传输数据
- 高速CAN规定:
- 电压差为0V时表示逻辑1(隐性电平)
- 电压差为2V时表示逻辑0(显性电平)
- 低速CAN规定:
- 电压差为-1.5V时表示逻辑1(隐性电平)
- 电压差为3V时表示逻辑0(显性电平)
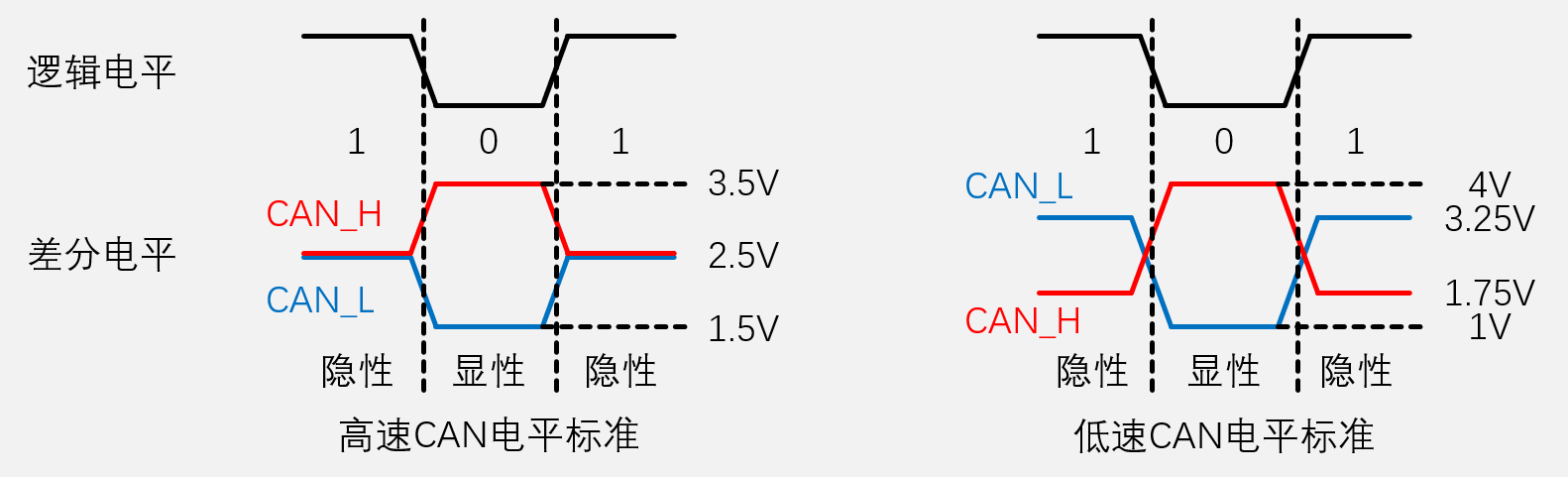
这里有两种电平表示方法:
逻辑电平和差分电平
后面的帧时序,为了简便,使用的都是逻辑电平画法,逻辑1是两线收紧,默认隐性,逻辑0是两线舒张,呈现显性
总结:显隐性描述的是总线的状态;1和0是为了与电路约定速成的规则对应!
CAN收发器-TJA1050(高速CAN)
CAN收发器-TJA1050(高速CAN)芯片引脚图
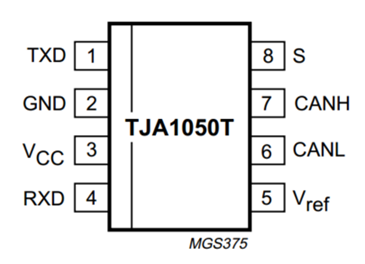
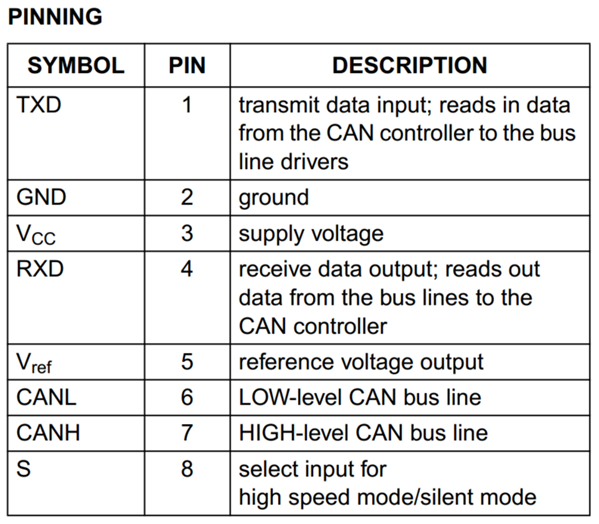
引脚说明
芯片的内部结构
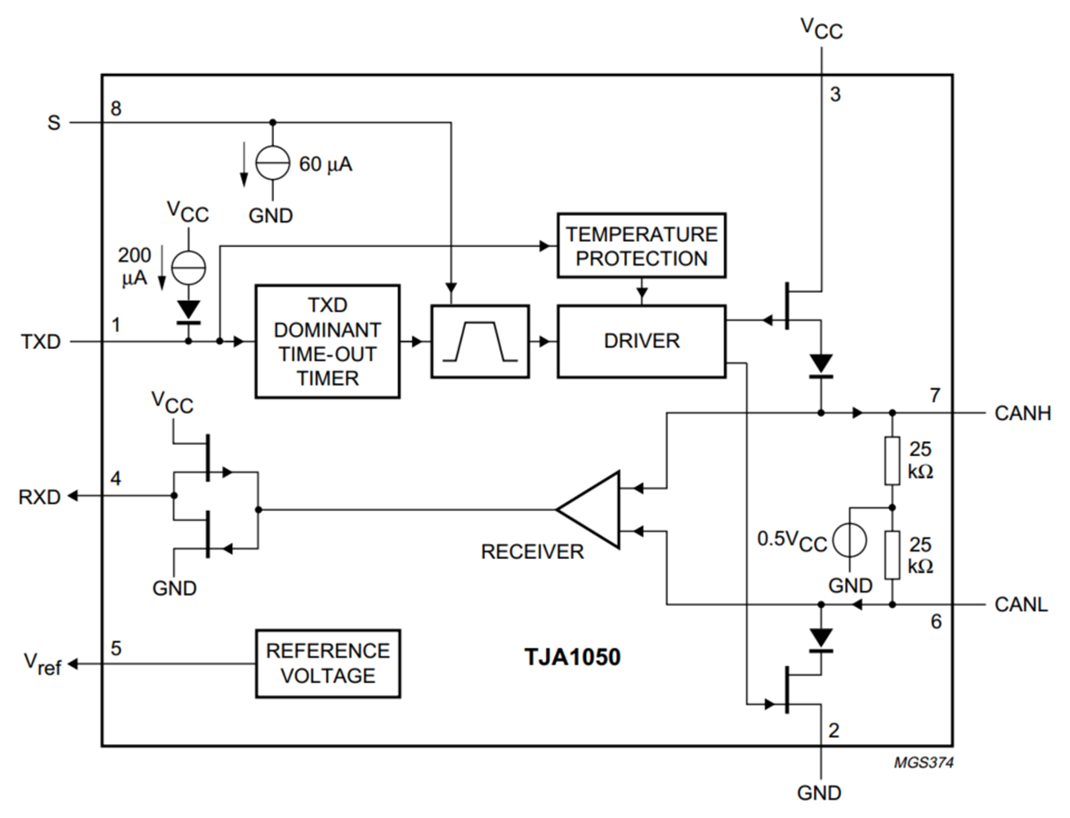
CAN收发器芯片内部:CANH和CANL就是CAN总线
RECEIVER(接收器):时刻检测电压差,并输出到左边的线:如果总线有电压差就输出1,如果没有电压差就输出0,这个1和0,通过两个场效应管的输出驱动器输出到RXD引脚,这两个场效应管可以当做电子开关,右边为1时,上管断开,下管导通,左边输出0,右边为0时,上管导通,下管断开,左边输出1,这两个管子还有电平反相的功能。
最终整体上的效果:CAN总线有电压差,RXD引脚输出低电平0,表示显性电平;CAN总线没有电压差,RXD引脚输出高电平1,表示隐性电平。
RXD这一块是输入部分;TXD这一块是输出部分
-
当TXD给1时,后面的驱动器DIRVER就会控制相连接的两个场效应管都断开,相当于不对总线进行任何操作,外部的两个终端电阻进行收紧,使总线电平一致,总线呈现默认的隐性电平1,;两根线之间有两个25K的电阻,作用是两根线都拉到0.5倍VCC的中间电平,也就是CANH和CANL的对地电压都是5/2 = 2.5V左右。
-
当TXD给0时,后面的驱动器DIRVER就会控制相连接的两个场效应管都导通,上面的场效应管将CANH拉高,下面的场效应管将CANL拉低。输出显性电平0。
-
这个是
电流源上拉,如果TXD悬空,保持TXD默认是1的状态,防止输入引脚状态不确定造成的误操作。 -
TXD显性超时计时器:如果TXD出现异常,始终输入显性电平0,CAN总线时钟呈现显性电平0状态,这样的话,整条总线会瘫痪,并且没有设备可以阻止这一情况。如果设备出现了异常,等一段时间后,收发器将自动释放总线,防止瘫痪。 -
S引脚可以选择是否静默,S引脚有个下拉的电流源,如果S悬空,则会默认输入0 -
温度保护TEMPERATURE PROTECTION:如果温度异常,则会控制驱动器切断输出,以免干扰CAN总线。
CAN物理层特性
CAN物理层规定了硬件电路怎么接线,电平定义是什么,如何发送显性电平0和隐性电平1,这样就学会了如何发送一个数据位,实际的应用中肯定不是只发送一位数据,我们需要连续发送多位数据,来组成数据流,每一位都是什么意思,谁先发谁后发,如何编码和解析数据是CAN总线帧格式的内容。


















 6996
6996

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











