






一、ROS的介绍
二、ROS软件安装
三、ROS第一个例程——小海龟
小结
一、ROS的介绍
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。
二、ROS软件安装
1.添加ROS软件源
在ub中输入
// An highlighted block
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加密钥
下面展示一些 内联代码片。
// An highlighted block
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
3.安装ROS
// An highlighted block
sudo apt update
sudo apt-get install ros-melodic-desktop-full
下载对应ub的ros,否则要出错
4.初始化rosdep
// An highlighted block
sudo rosdep init
rosdep update
相关错误解决:
(1)使用sudo rodep init出现sudo rosdep:找不到命令提示的错误
解决方法:
sudo apt install python-rosdep
(2)出现ERROR: cannot download default sources list from: https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list Website may be down.的错误
(3)出现ERROR: error loading sources list: <urlopen error <urlopen error timed out (https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml)
本地安装的方式
①下载相关文件
Github下载地址:https://github.com/ros/rosdistro
②解压文件
unzip rosdistro-master.zip -d rosdistro
③修改20-default.list文件
// An highlighted block
sudo nano /etc/ros/rosdep/sources.list.d/20-default.list
文件内容修改如下:
yaml file:///home/lyy/ros/rosdistro/rosdistro-master//osx-homebrew.yaml osx
#generic
yaml file:///home/jmy/rosdistro/rosdistro-master/base.yaml
yaml file:///home/jmy/rosdistro/rosdistro-master/python.yaml
yaml file:///home/jmy/rosdistro/rosdistro-master/ruby.yaml
gbpdistro file:///home/jmy/ros/rosdistro/rosdistro-master/fuerte.yaml fuerte
④修改source_list.py文件
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
将原DEFAULT_SOURCES_LIST_URL一行注释,在其后添加如下内容
DEFAULT_SOURCES_LIST_URL = 'file:///home/lyy/ros/rosdistro/rosdep/sources.list.d/20-default.list'
⑤修改rep3.py文件
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
将原REP3_TARGETS_URL一行注释,在其后添加如下内容
REP3_TARGETS_URL = 'file:///home/lyy/ros/rosdistro/releases/targets.yaml'
⑥修改__init__.py文件
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
将原DEFAULT_INDEX_URL一行注释,在其后添加如下内容
DEFAULT_INDEX_URL = 'file:///home/lyy/ros/rosdistro/index-v4.yaml'
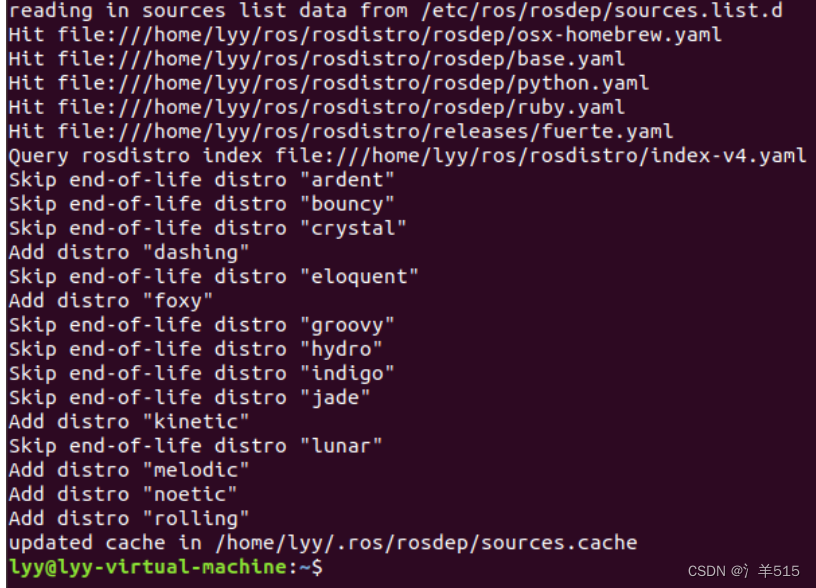
修改完成后,在终端输入
rosdep update
5.设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.安装rosinstall
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
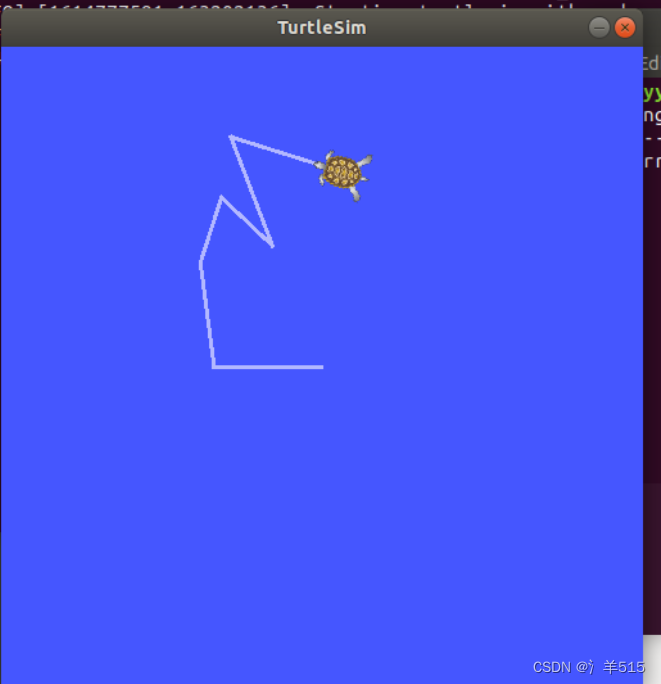
三、ROS第一个例程——小海龟
开启小海龟仿真的步骤:
①启动ROS Master
roscore
②启动小海龟仿真器
rosrun turtlesim turtlesim_node
③启动海龟控制节点
rosrun turtlesim turtle_teleop_key
小结
在整个安装过程中,我先下载了vm结果一打开就蓝屏,于是就换了一Oracle VM VirtualBox,准备完成后,下载ros的过程中,遇到了很多难题,首先是版本问题,一定要对应,然后就是网络问题,建议直接去本地下载,之后改写文件,这部分花费了很长时间,这次学会了,ros一下简单操作收获很大。谢谢老师。















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









