







江苏省领航杯人工智能竞技人车协同赛项记录
1、类人形机器人要求
1、类人形机器人的外形必须由四肢,躯干和头等及几部分组成
2、类人形机器人必须使用电池供电,比赛期间禁止外接电源
3、编程语言不限,所有动作程序均需参赛队员自行编写参赛队员必须能解释其程序
4、类人形机器人尺寸和重量不限但类人形机器人脚部不得超过启动区范围
2、智能小车要求
智能小车底盘投影不能超过300mm*300mm,高度不能超过500mm(含机械臂的最大伸展尺寸)
3、场地 长2980mm*宽1760mm
1、本赛项竞赛场地搭建在室内地面上,地图材质为刀刮布,环境光线以现场实际情况为准
2、竞赛场地共分三个区域对应三个任务
3、任务二的平衡板表面与场地表面材质相同
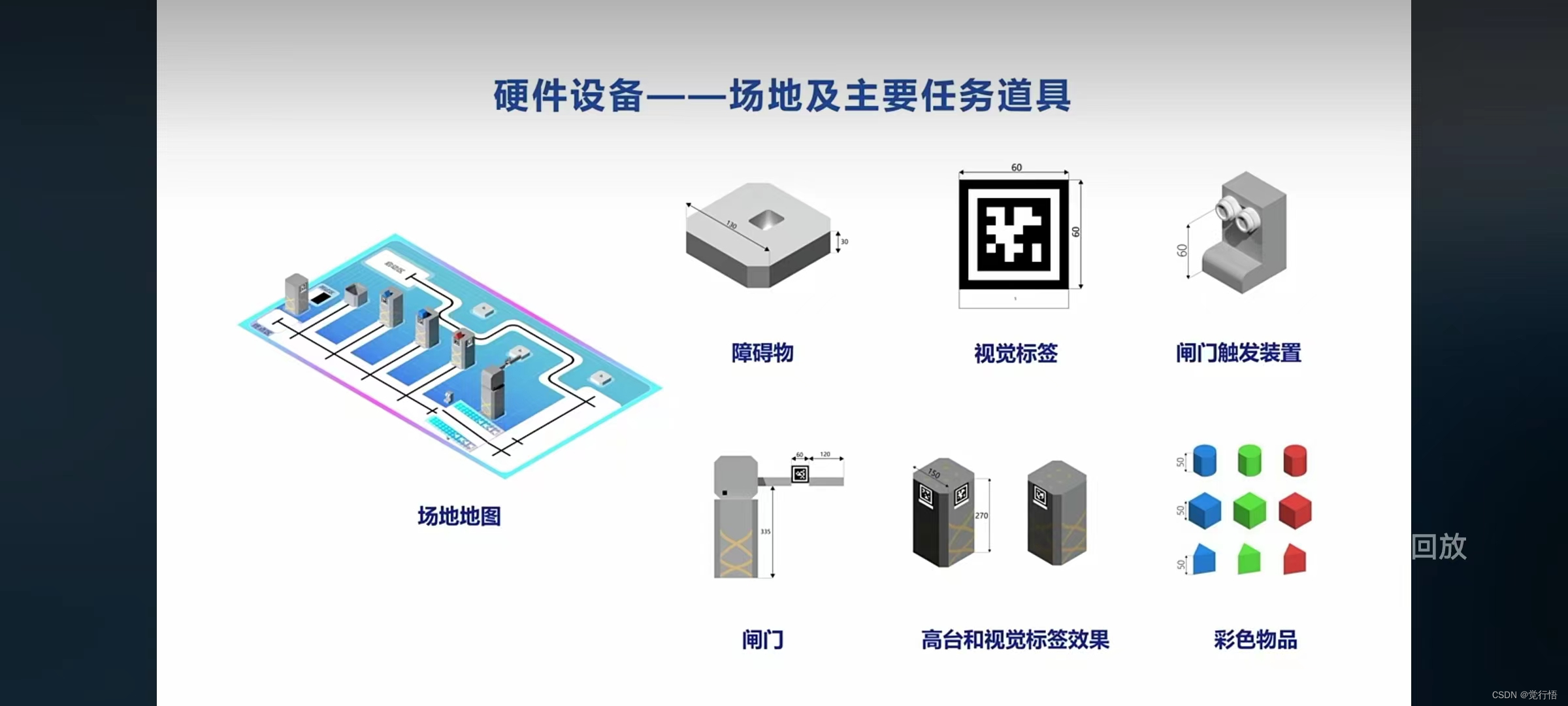
4、彩色物品
EVA材质
RGB值:红色(214,66,61),蓝色(52,115,203),绿色(133,193,89)
5、分值分布
任务一跟随避障:20
任务二平衡挑战:30
任务三协作搬运:40
操作分全自主运行:10
总分100(90)
6、任务一:跟随避障
类人形机器人和智能小车一同从启动区出发,类人形机器人通过识别智能小车上的绿色小方块来跟随智能小车前进,穿越障碍区
1、参赛机器人不得两只脚都离开白线
2、参赛电脑上始终显示机器人图传画面
3、如果画面丢失,小车原地等待机器人寻找
4、机器人和小车的距离<=500mm
5、小车单次丢失视野的时间<20s
技术要点:
(1)智能小车自主巡线,避障——传感器与运动控制
(2)智能小车和类人形机器人端口通信——人车协调
(3)类人机器人步态算法自主跟随小车
参考方案:
1、颜色阈值协助图像识别
2、Python图片绘制坐标象限区域,捕捉目前绿色方块位置
3、类人机器人步态前进算法建议动作回读或使用动作库
7、任务二 :平衡板挑战
1、类人形机器人识别闸门上的视觉标签,检测到闸门之后,原地等待智能小车开启闸门
2、智能小车进入跷跷板区域后,调节自身位置以保持跷跷板平衡,并能在外力干扰下迅速重新调整平衡,完成跷跷板挑战
3、智能小车驶出跷跷板区域,遮挡闸门触发装置,开启闸门,类人形机器人通过该区域
4、30s内完成挑战
技术要点:
1、智能小车利用陀螺仪控制小车平衡
2、类人机器人摄像头图像识别二维码
3、智能小车路口巡线的控制
参考方案:
1、智能小车的巡线可以调用巡线函数并记录路口次数
2、陀螺仪可选用MPU6050模块,可以利用陀螺仪与加速传感器数据的融合算法
3、类人机器人采集、绘制坐标象限区域,捕捉目前闸机二维码位置
8、任务三:协作搬运
参赛选手通过语音指令与类人形机器人进行交互,类人形机器人利用物品块或视觉标签导航到合适位置,完成物品块视觉特征(颜色、形状)的识别,并进行对应的语音播报,找到正确的目标物品之后,类人机器人与智能小车协作,将物品搬运到置物箱中,最终智能小车驶入终点区,完成任务
任务过程:
1、参赛选手给出人形机器人指令:绿色正方块
2、人形机器人进行平移,寻找目标物块
3、检测到绿色正方块后,机器人往前行进
4、此时智能小车通过巡线找到人形机器人
5、此时人形机器人通过机械臂将方块搬运到智能小车物架上
6、小车一直巡线到置物箱附近,将物块投放到置物箱中
7、智能小车继续运行前进到重点区
技术要点:
1、智能小车运动控制
2、类人机器人语音交互
3、类人机器人动作控制
4、类人机器人图像识别
5、类人机器人与智能小车端口通信功能
参考方案:
1、语音模块的调用
2、动作回读程序的调用
3、类人机器人采集、绘制坐标象限区域,捕捉二维码位置
4、类人机器人可对颜色阈值的判断辅助寻找物体的颜色
通过二维码辅助进行识别,摒弃了干扰因素,也就是说先进行二维码寻找识别,之后在一定范围内进行颜色形状识别
9、其他规则
1、演示开始后,每个任务均由机器人全自主完成,不得有人为介入。一旦有人为介入,比如机器失控、摔倒情况,则从人为介入开始,当次演示其后的动作不得分
2、紫色虚线框围殴任务中转区域,机器人在完成任务二与任务三时可从紫色虚线框内的任意位置启动,如果参赛队伍在演示开始后,任务二与任务三不做启动位置的调整,那么任务二与任务三可获得额外的10分操作分
3、演示开始后,禁止任何形式的远程遥控和赛题内容以外的信息输入,包括但不限于:APP远程遥控,PC远程操控,使用赛题规定内容以外的按键和传感器进行信息输入等,一经发现,比赛按零分处理
















 1141
1141











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











