









目录:
一、import相关库
二、输入棋盘格内角点
三、创建vector以存储每个棋盘图像的3D点矢量
四、创建vector以存储每个棋盘图像的2D点矢量
五、为三维点定义世界坐标系
六、读取图片并进行标定
七、输出相机参数
八、读取待校正图片并读取参数
九、利用undistort函数进行畸变矫正
十、计算反向投影误差
温馨提示:本文仅根据摄像头已采集的图片(多角度拍摄的棋盘格)进行相关操作,摄像头调用及采集教程详情见《[openCV/Python]基于openCV的图片素材采集系统V3》
一、import相关库
cv2需要额外下载opencv-python库,详情见《[Python]如何在新版Pycharm中配置pip源与安装openCV等库》
import cv2
import numpy as np
import glob二、输入棋盘格内角点
# Defining the dimensions of checkerboard
CHECKERBOARD = (8,6)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)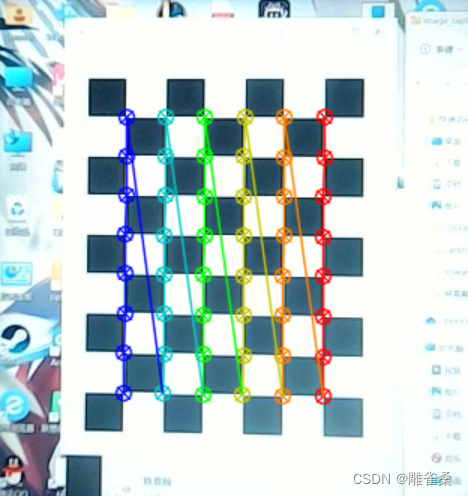
注:如图为9X7的棋盘格,内角点为8X6
三、创建vector以存储每个棋盘图像的3D点矢量
# Creating vector to store vectors of 3D points for each checkerboard image
objpoints = []四、创建vector以存储每个棋盘图像的2D点矢量
# Creating vector to store vectors of 2D points for each checkerboard image
imgpoints = []五、为三维点定义世界坐标系
# Defining the world coordinates for 3D points
objp = np.zeros((1, CHECKERBOARD[0] * CHECKERBOARD[1], 3), np.float32)
objp[0, :, :2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
prev_img_shape = None六、读取图片并进行标定
# Extracting path of individual image stored in a given directory
images = glob.glob('./calibration/*.jpg')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Find the chess board corners
# If desired number of corners are found in the image then ret = true
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD,
cv2.CALIB_CB_ADAPTIVE_THRESH + cv2.CALIB_CB_FAST_CHECK + cv2.CALIB_CB_NORMALIZE_IMAGE)
"""
If desired number of corner are detected,
we refine the pixel coordinates and display
them on the images of checker board
"""
if ret == True:
objpoints.append(objp)
# refining pixel coordinates for given 2d points.
corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
imgpoints.append(corners2)
# Draw and display the corners
img = cv2.drawChessboardCorners(img, CHECKERBOARD, corners2, ret)
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
h, w = img.shape[:2]七、输出相机参数
print("Camera matrix : \n")
print(mtx)
print("dist : \n")
print(dist)
print("rvecs : \n")
print(rvecs)
print("tvecs : \n")
print(tvecs)
print("-----------------------------------------------------")
八、读取待校正图片并读取参数
img = cv2.imread(images[0])
h, w = img.shape[:2]
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w, h), 1, (w, h)) # 显示更大范围的图片(正常重映射之后会删掉一部分图像)
print(newcameramtx)九、利用undistort函数进行畸变矫正
print("------------------使用undistort函数-------------------")
dst = cv2.undistort(img, mtx, dist, None, newcameramtx)
cv2.imshow("dst", dst)
print("dst的大小为:", dst.shape)
cv2.waitKey(0)
cv2.destroyAllWindows()十、计算反向投影误差
print("-------------------计算反向投影误差-----------------------")
tot_error = 0
for i in range(len(objpoints)):
img_points2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i], img_points2, cv2.NORM_L2) / len(img_points2)
print("error of " + str(i) + ": ", error)
tot_error += error
mean_error = tot_error / len(objpoints)
print("total error: ", tot_error)
print("mean error: ", mean_error)注:实测经正常操作mean error(平均反向投影误差)在0.025左右
源代码:
import cv2
import numpy as np
import glob# Defining the dimensions of checkerboard
CHECKERBOARD = (8,6)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)# Creating vector to store vectors of 3D points for each checkerboard image
objpoints = []
# Creating vector to store vectors of 2D points for each checkerboard image
imgpoints = []# Defining the world coordinates for 3D points
objp = np.zeros((1, CHECKERBOARD[0] * CHECKERBOARD[1], 3), np.float32)
objp[0, :, :2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
prev_img_shape = None# Extracting path of individual image stored in a given directory
images = glob.glob('./calibration/*.jpg')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Find the chess board corners
# If desired number of corners are found in the image then ret = true
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD,
cv2.CALIB_CB_ADAPTIVE_THRESH + cv2.CALIB_CB_FAST_CHECK + cv2.CALIB_CB_NORMALIZE_IMAGE)"""
If desired number of corner are detected,
we refine the pixel coordinates and display
them on the images of checker board
"""
if ret == True:
objpoints.append(objp)
# refining pixel coordinates for given 2d points.
corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)imgpoints.append(corners2)
# Draw and display the corners
img = cv2.drawChessboardCorners(img, CHECKERBOARD, corners2, ret)cv2.imshow('img', img)
cv2.waitKey(0)cv2.destroyAllWindows()
h, w = img.shape[:2]
"""
Performing camera calibration by
passing the value of known 3D points (objpoints)
and corresponding pixel coordinates of the
detected corners (imgpoints)
"""
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)print("Camera matrix : \n")
print(mtx)
print("dist : \n")
print(dist)
print("rvecs : \n")
print(rvecs)
print("tvecs : \n")
print(tvecs)
print("-----------------------------------------------------")# 畸变校正
img = cv2.imread(images[0])
h, w = img.shape[:2]
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (w, h), 1, (w, h)) # 显示更大范围的图片(正常重映射之后会删掉一部分图像)
print(newcameramtx)print("------------------使用undistort函数-------------------")
dst = cv2.undistort(img, mtx, dist, None, newcameramtx)
cv2.imshow("dst", dst)
print("dst的大小为:", dst.shape)
cv2.waitKey(0)
cv2.destroyAllWindows()print("-------------------计算反向投影误差-----------------------")
tot_error = 0
for i in range(len(objpoints)):
img_points2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i], img_points2, cv2.NORM_L2) / len(img_points2)
print("error of " + str(i) + ": ", error)
tot_error += errormean_error = tot_error / len(objpoints)
print("total error: ", tot_error)
print("mean error: ", mean_error)
















 8379
8379











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











