






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
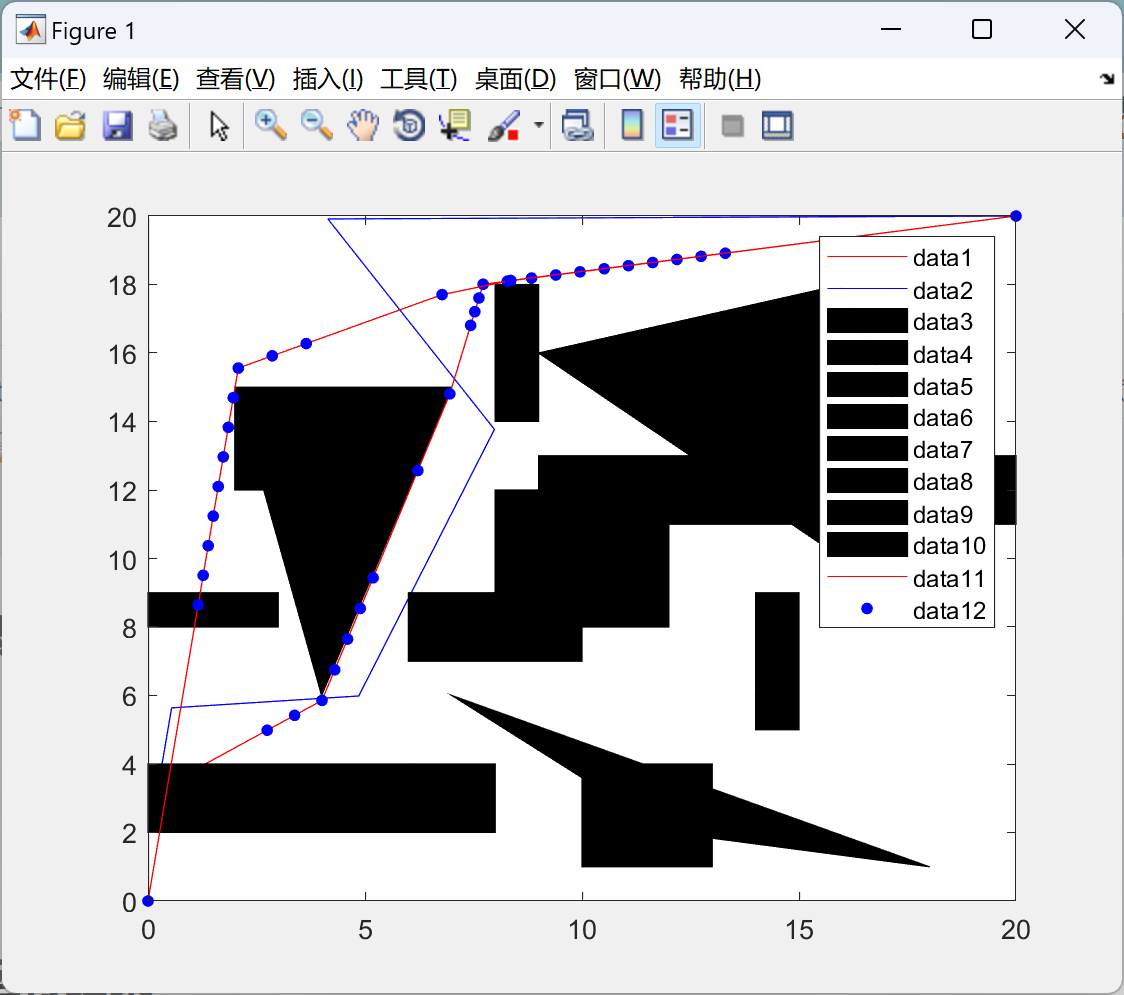
基于遗传算法的路径规划优化算法是一种启发式优化方法,通过模拟自然选择和遗传机制来寻找最优路径。在路径规划问题中,每个个体可以表示为一条路径,由一系列的节点或坐标点组成。每个节点代表路径中的一个位置或动作。对每个个体(路径)进行适应度评估,评估其在解空间中的表现。在路径规划中,适应度函数通常基于路径的长度、路径通过的单元格数量、避开障碍物的能力等指标来衡量。通过遗传操作生成新的个体,并根据适应度评估选择保留一部分个体作为下一代的父代。这一过程反复进行,直到达到停止条件(如达到最大迭代次数或找到满意解)为止。基于遗传算法的路径规划优化算法能够有效地搜索复杂的路径空间,寻找到满足特定优化目标的最佳路径解。这种方法在实践中被广泛应用于机器人路径规划、无人机航迹规划、交通流优化等领域。
📚2 运行结果
主函数部分代码:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%函数名称:主函数
%%入口参数:无
%%出口参数:无
%%说明:无
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear
pc=0.6; %交叉概率
pm=0.01; %变异概率
c=1.5;
w=0;
[x,y]=popinit(10,25,0,0,20,20) %产生初始种群
[x,y]=optimization2(x,y);
% D=calfitvalue(x,y);
for i=1:1:30 %设置进化代数
w=w+1
% [newx,newy]=selection(x,y,D); %选择
[newx,newy]=crossover(x,y,pc); %交叉
[newx,newy]=mutation(newx,newy,pm); %变异
D=calfitvalue(newx,newy); %重新计算适应度
[newx,newy]=selection(newx,newy,D); %选择 保证交叉变异后的种群都不经过障碍物
% D=calfitvalue(newx,newy); %重新计算适应度 选择之后的种群适应度也已经发生变化。所以必须重新计算
if rand<0.0
[newx,newy]=optimization(newx,newy,1);
% D=calfitvalue(newx,newy);
end
D=calfitvalue(newx,newy);
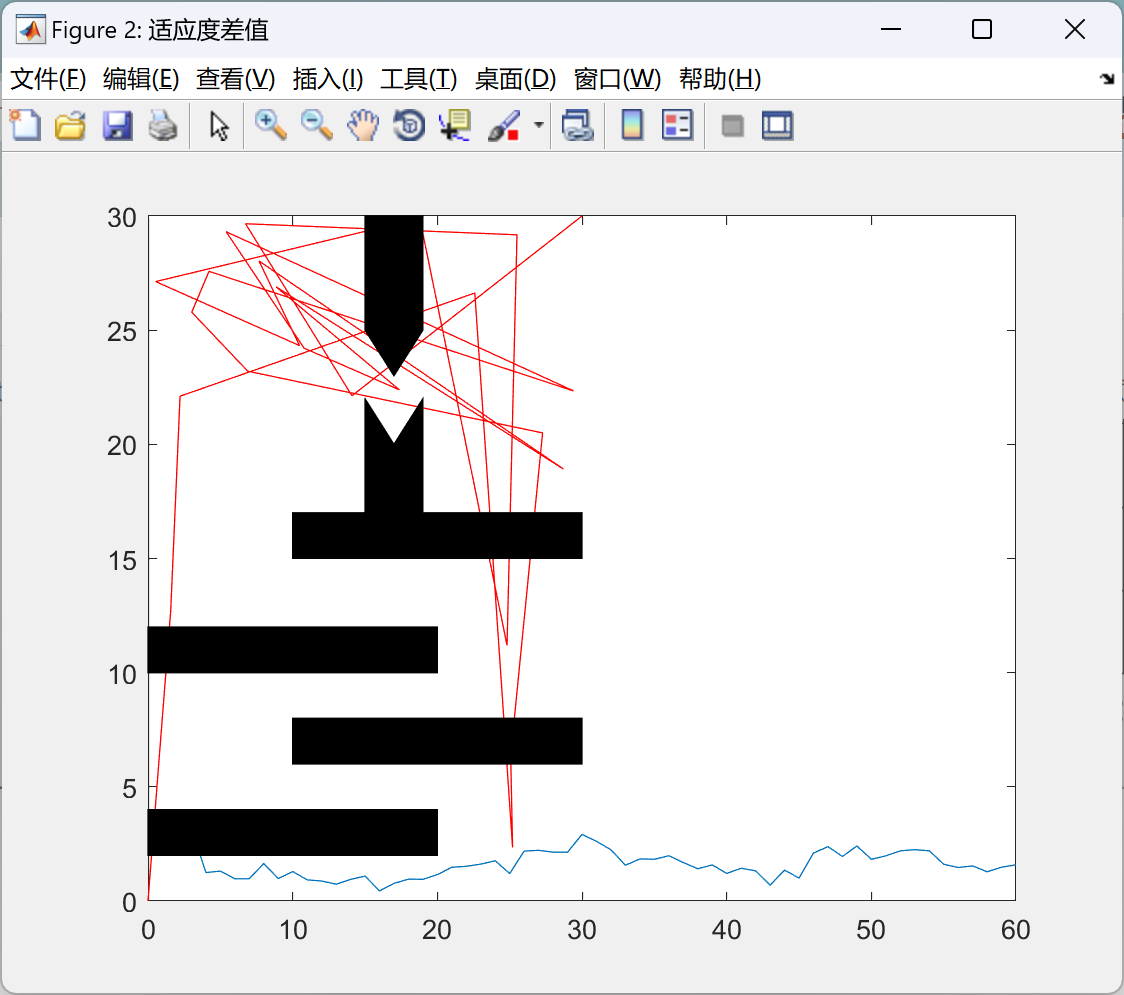
errorx(i)=i;
if min(D)==0
error(i)=max(D)-16;
else
erroraver(i)=max(D)-min(D);
end
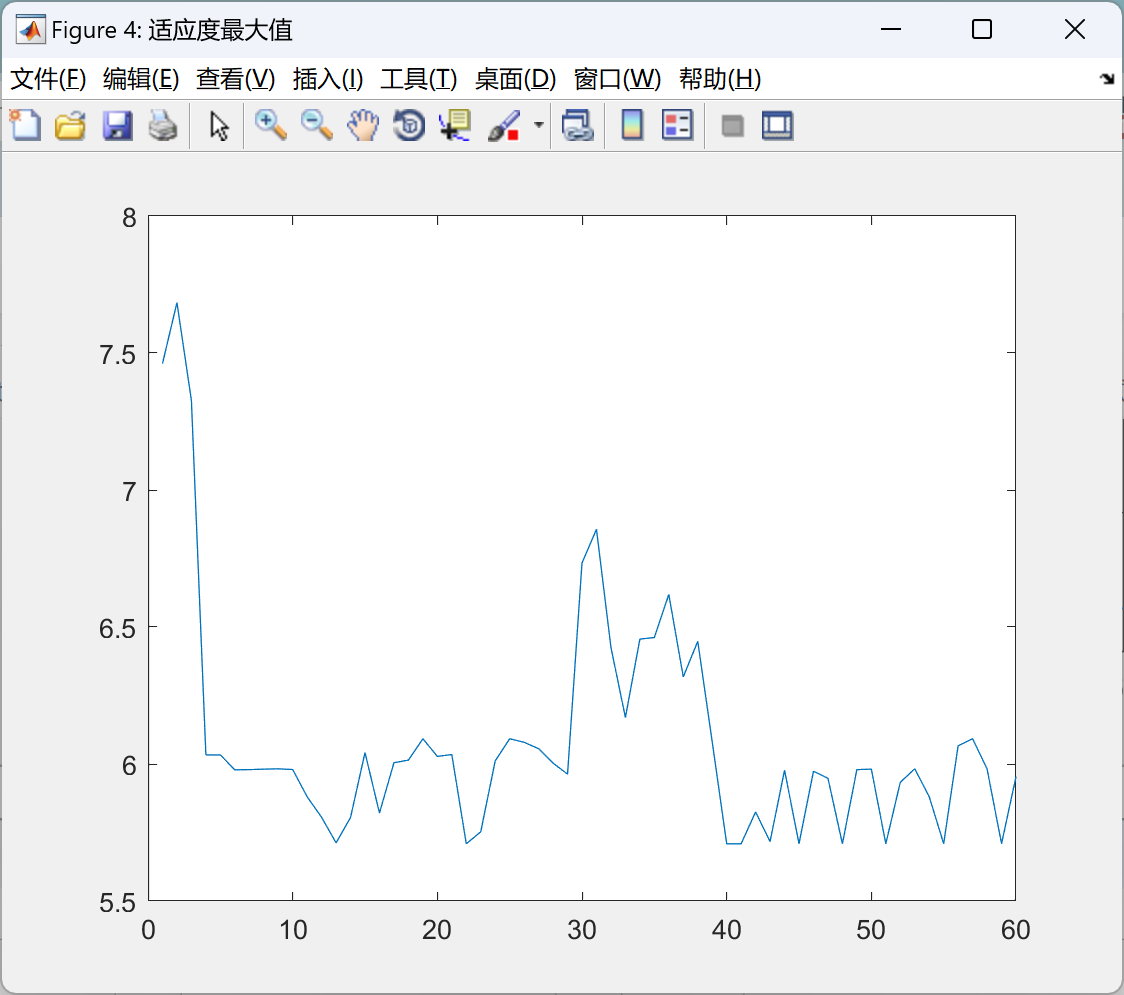
errormax(i)=max(D);
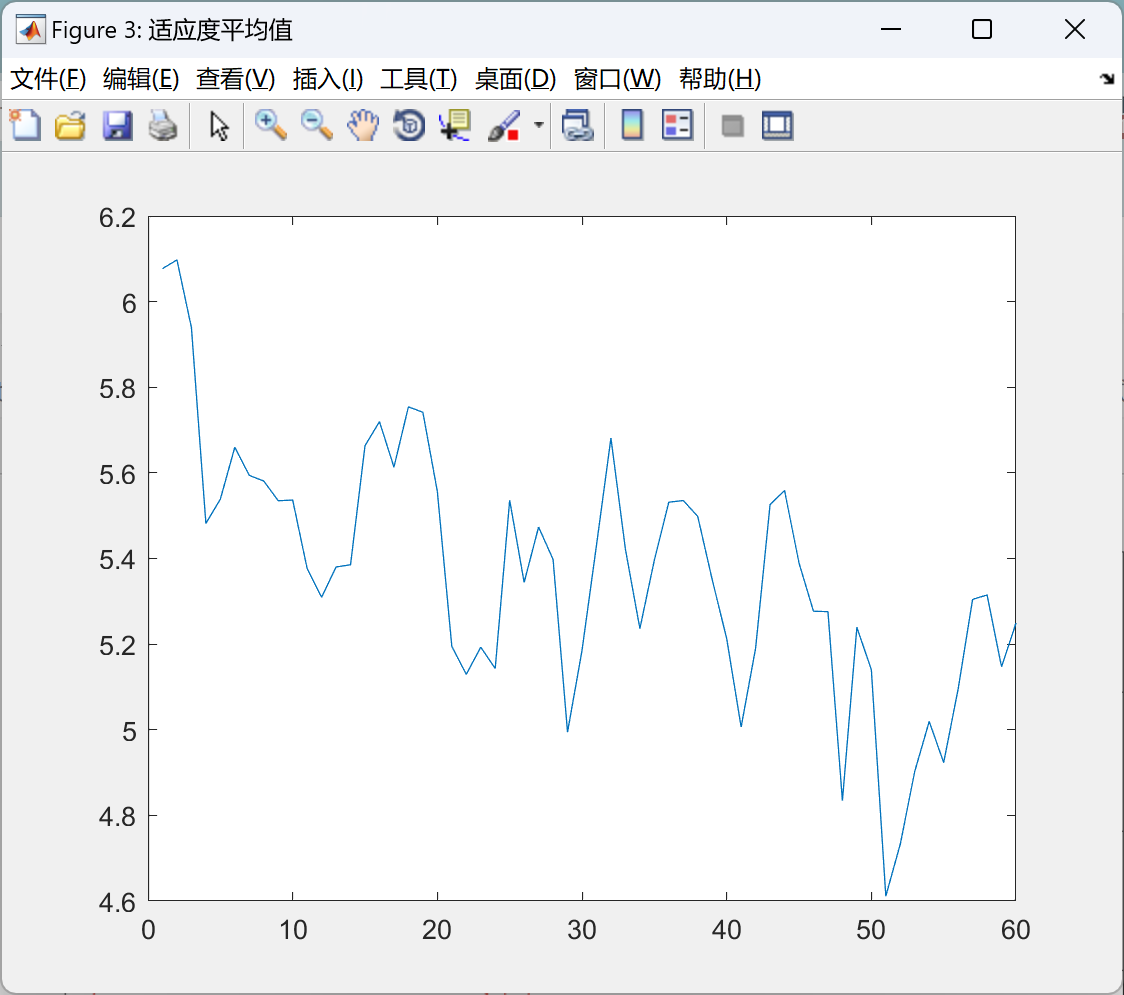
sumd(i)=sum(D)/max(size(D));
% D=D*sumd(i)*(c-1)/(max(D)-sumd(i))+sumd(i)*(max(D)-c*sumd(i))/(max(D)-sumd(i));
[bestx,besty,bestfit]=best(newx,newy,D); %选择最佳个体
bbestx(i,:)=bestx; %保存最佳个体
bbesty(i,:)=besty;
bbestfit(i)=bestfit;
x=newx;
y=newy;
end
[bbbestfit,I]=max(bbestfit) %计算选择出来的最佳个体中 适应度最大的个体,作为最优值输出
bbbestx=bbestx(I,:);
bbbesty=bbesty(I,:);
for i=1:1:10
[bbbestx,bbbesty]=optimization(bbbestx,bbbesty,1);
end
figure(1)
%根据适应度函数中建立的环境模型,填充障碍物
%不规则形状
fill([8,12,12,8,8],[8,8,12,12,8],[0,0,0])
hold on
fill([2,6,6],[2,2,4],[0,0,0])
hold on
fill([4,7,2],[6,15,15],[0,0,0])
hold on
fill([9,16,16],[16,10,18],[0,0,0])
hold on
fill([18,7,12],[1,6,2],[0,0,0])
hold on
fill([8,9,9,8,8],[14,14,18,18,14],[0,0,0])
hold on
% %%画出最有路径的路线
% plot(bbbestx,bbbesty,'r-')
% hold on
% plot(bbbestx,bbbesty,'b.','MarkerSize',15)
% hold on
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]吴素谦,闫建国,杨斌,等.多策略改进的天鹰优化器及其在路径规划中的应用[J/OL].计算机应用:1-9[2024-05-10].http://kns.cnki.net/kcms/detail/51.1307.TP.20240424.1641.008.html.
[2]吴梅花.基于改进人工势场法的移动机器人路径规划研究[J].黑龙江科学,2024,15(08):81-84.















 2400
2400

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









