






👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
随着信息时代的发展,无人车的功能日渐丰富,在物流运输、室内清洁与安防巡检等领域发挥重要作用。特别是在安防巡检领域,无人车可替代人工巡检,并有效的节省人力资源,提高巡检的安全性。
无人驾驶地面车辆(无人车)的避障研究是自动驾驶技术领域的一个重要课题。避障技术是指无人车在行驶过程中能够识别并绕过障碍物,确保车辆安全行驶。这项技术主要依赖传感器数据的获取与处理、环境感知、路径规划和控制等多方面的技术综合。
### 无人车避障的关键技术
1. **传感器技术**:
- **激光雷达(LiDAR)**:提供高精度的三维环境数据,能够精准识别车辆周围的障碍物。
- **摄像头**:捕捉环境的图像信息,用于目标检测和分类。
- **毫米波雷达**:用于探测车辆前方的障碍物,尤其适用于恶劣天气条件下。
- **超声波传感器**:用于近距离障碍物的检测。
2. **环境感知**:
- **目标检测与识别**:通过深度学习算法,如卷积神经网络(CNN),无人车可以识别前方的行人、车辆、交通标志等。
- **障碍物定位**:利用传感器数据进行障碍物的位置估计和跟踪。
3. **路径规划**:
- **全局路径规划**:基于预先设定的地图数据,规划从起点到终点的最优路径。
- **局部路径规划**:在行驶过程中,根据实时环境数据调整行驶路径,避开障碍物。
4. **控制系统**:
- **运动控制**:根据路径规划的结果,控制车辆的转向、加速、减速等操作。
- **决策系统**:结合感知和规划信息,做出实时决策,确保行驶安全。
### 常见的避障算法
1. **基于栅格地图的方法**:
- 将环境离散化为栅格地图,通过算法计算每个栅格的可行性,进而规划避障路径。
2. **基于动态窗口的方法(DWA)**:
- 在实时动态窗口中评估不同速度和转向角组合的可行性,选择最优组合实现避障。
3. **基于采样的路径规划算法**:
- 如快速扩展随机树(RRT)和A*算法,通过在环境中采样生成路径,选取最优路径避开障碍物。
### 遇到的挑战
- **实时性要求**:避障决策需要在极短的时间内完成,对计算速度和效率有较高要求。
- **多传感器数据融合**:需要将不同传感器的数据进行有效融合,减少误差,提高环境感知的准确性。
- **复杂环境适应性**:无人车需在各种复杂环境下(如城市街道、高速公路、恶劣天气)都能有效避障。
### 未来发展方向
- **高效算法**:开发更高效的避障算法,提升计算速度和避障效果。
- **智能传感器**:提高传感器的智能化水平,增强环境感知能力。
- **自主学习能力**:利用机器学习和人工智能技术,使无人车具备自主学习和适应新环境的能力。
- **系统集成**:加强避障系统与其他自动驾驶系统的集成,提升整体系统的可靠性和稳定性。
无人车避障技术的研究,不仅是为了实现安全驾驶,更是为了提升自动驾驶技术的整体水平,推动无人驾驶汽车的商业化应用。
📚2 运行结果


部分代码:
clear all;
close all;
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
% goal point
% threat obstacle
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = (0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)/y(iter_j+1)));
end
end
figure(2)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% agent
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = 0.3*(0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)));
end
end
figure(3)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% swarm
for iter = 1 : 31
for iter_j = 1 : 99
cost_goal(iter,iter_j) = 1-exp(-(y(iter_j))/y(iter_j+1));
end
end
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
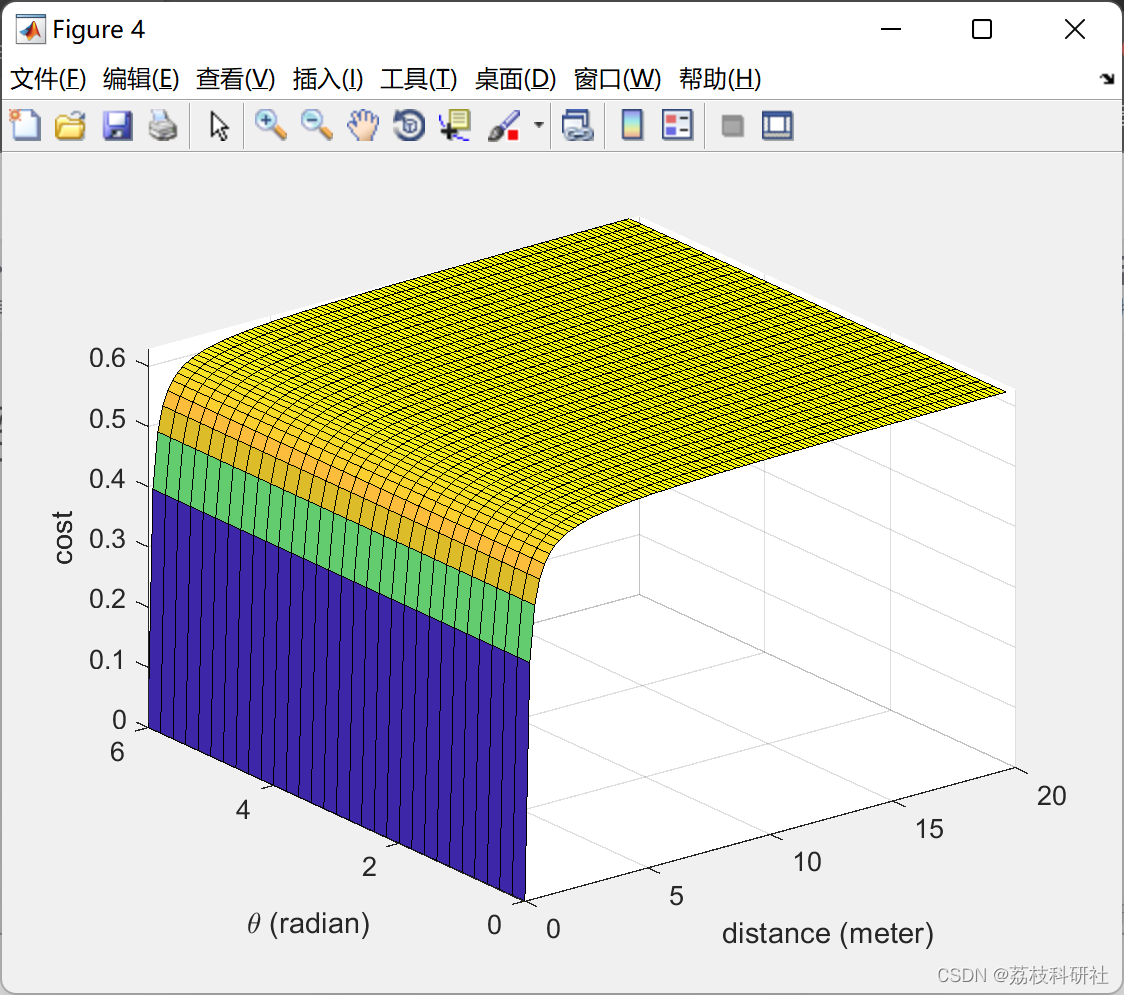
figure(4)
surf(y(1:99),x,cost_goal);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (radian)')
zlabel('cost')
clear all;
close all;
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
% goal point
% threat obstacle
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = (0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)/y(iter_j+1)));
end
end
figure(2)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% agent
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = 0.3*(0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)));
end
end
figure(3)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% swarm
for iter = 1 : 31
for iter_j = 1 : 99
cost_goal(iter,iter_j) = 1-exp(-(y(iter_j))/y(iter_j+1));
end
end
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
figure(4)
surf(y(1:99),x,cost_goal);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (radian)')
zlabel('cost')
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]王桢发. 无人车巡检路径规划研究[D].南京邮电大学,2022.DOI:10.27251/d.cnki.gnjdc.2022.000481.
[2]李凤娇.无人驾驶车辆综合避障行为研究与评价[D].北京理工大学,2015.
[3]朱麒融.无人驾驶汽车避障方法探析[J].科技资讯, 2016(21).DOI:10.16661/j.cnki.1672-3791.2016.21.053.















 197
197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









